

Пространство и время. Свойства пространства и времени. Системы отсчета и их роль в описании движения. Общая характеристика про странства и времени. Из опыта вы знаете, что окружающий нас мир непрерывно меняется. При этом изменения носят двойственный характер. С одной стороны, про исходит движение наблюдаемых объектов или их частей друг относительно друга, а с другой – сами объекты модифицируются с течением времени. Поскольку пространство и время являются фундаментальными понятиями, то зададим их через характеристики физических объектов и процессов, которые могут быть измерены. Пространство отражает такие черты тел, как протяженность и по рядок их взаимного расположения. Время отражает такие особенности процессов, как последовательность и длительность. Пространство и время бесконечны. Свой ства времени: непрерывность, однород ность и одномерость. В классической механике считается, что время непрерывно, т. е. события на шкале времени могут располагаться сколь угодно близко друг к другу. Опыт показывает, что абсолютной характеристикой по отношению к выбору начала отсчета времени является временной интервал Dt, равный длительности промежутка между мгновениями, отвечающими началу t0 и концу tк какого-либо процесса: Dt = tк- t0 > 0. Эквивалентные про межутки времени инвариантны(неизменны) по отношению к выбору начала его отсчета. В этом выражается одно из важнейших свойств времени - однородность. Однородность време ни проявляется в неизменности физических законов по отношению к моменту проведения испытаний. Еще одним важным свойством времени является его одномерность. Это свойство проявляется в том, что для указания момента наступления какого-либо события или его длительности до статочно лишь одного числа. Основные свойства пространства: трехмерность, однородность, изотропность, непрерывность. Классическая механика опирается на геометрию Евклида. Согласно ей окружающий нас мир, а следовательно, и пространство являются трехмерными, т. е. для задания положения материальной точки в пространстве необходимо указать три числа. Пространственный интервал инвариантен по отношению к выбору начала отсчета системы координат, что обусловлено таким свойством пространства, как однородность. Однородность пространства проявляется в независимости физических законов от положения исследуемой физической системы в пространстве. Итак, инвариантность пространственного интервала по отношению к выбору СК обусловлена такими свойствами пространства, как изотропность и однородность Система отсчета представляет собой совокупность тела от счета, связанной с ним системы координат, и синхронизованных часов. Роль системы отсчета в описании механического движения. Выбор СО произволен, и, как показывает опыт, механическое движение выглядит в них по-разному. Однако, существуют величины, неизменные по отношению к законам преобразования координат, с помощью которых осуществляется переход к описанию движения в разных СО. В рамках классической механики, рассматривающей движение тел с малыми скоростями, примерами таких вел чин служат временной и пространственный интервалы. В связи с изложенным, с точки зрения решения задачи о нахождении положения тела в пространстве в любой момент времени систему отсчета целесообразно выбирать так, чтобы движение по отношению к ней описывалось максимально просто. При этом сама СО выполняет роль инструмента для изучения законов механического движения.
|
Способы описания движения материальной точки: векторный, естественный и координатный. Эквивалентность различных способов описания движения.
Векторный способ описания движения. Векторный способ описания движения заключается в нахождении величины и направления радиус-вектора r в любой момент времени, т. е. установлении вида зависимости: r(t) = r(t)·er(t), где r(t) - модуль (величина) радиус-век тора; er(t) - единичный вектор, задающий направление вектора r.
Мгновенная скорость согласно определению равна производной от вектора перемещения по времени dr/dt:
aср = DV/Dt. Век тором средней скорости называется величина, равная от ношению приращения радиус-вектора к промежутку времени, в течение которого оно произошло. Vср = Dr/Dt. Естественный способ описания движения. В каждом конкретном случае движения радиус-вектор частицы очерчивает в пространстве определенную линию - траекторию. Расстояние пройденное частицей вдоль траектории называется путем. Путь - скалярная величина, значение которой всегда положительно. Путь,
пройденный частицей за конечный
промежуток времени t = t0, задается
выражнием:
Зa среднюю скорость прохождения пути Vsср принимают: Vs ср = Ds/Dt.
Координатный способ описания движения. Положение, а следовательно, и движение частицы в пространстве можно описать с помощью проекций радиус-вектора на оси координат. В общем случае таких проекций будет три {x, y, z}. Радиус-вектор частицы можно выразить через эти проекции и единичные вектора (орты) следующим образом: r(t) = x(t)·i + y(t)·j + z(t)·k = {x, y, z}, где i, j, k - единичные вектора, направленные вдоль осей координат; i = {1,0,0}; j = {0,1,0}; k = {0,0,1}. Для частицы, перемещающейся в трехмерном пространстве, число степеней свободы равно трем. Исходя из изотропности пространства, все три оси координат равноправны. Следовательно, задав способ описания движения относительно одной из них, мы сможем охарактеризовать движение материальной точки в трех мер ном пространстве в целом. Эквивалентность различных способов описания движения. Поскольку мы описывали од но и то го же движение, то результаты должны быть эквивалентными для различных способов описания. Действительно, величина вектора перемещения и его направление однозначно связаны с приращениями координат в соответствии с уравнениями. С другой стороны, траекторию движения, а следовательно и путь можно найти, исключив время из уравнений движения для пространственных проекций радиус-вектора. Таким об разом, векторный, естественный и координатный способы описания движения эквивалентны.
|
Путь и траектория. Понятие средней и мгновенной скорости и ускорения. Скорость прохождения пути. Поиск графика движения по его характеристикам. (случай одномерного равнопеременного движения)
Расстояние пройденное частицей вдоль траектории называется путем. Путь - скалярная величина, значение которой всегда положительно. Путь пройденный частицей за конечный промежуток времени, задается :
Воображаемая непрерывная линия, по которой перемещается материальная точка в пространстве, называется траекторией.
Вектором средней скорости называется величина, равная отношению приращения радиус-вектор к промежутку времени, в течении которого оно произошло. Vср = Dr/Dt.
Вектором среднего ускорения называется физическая величина, равная отношению приращения вектора скорости к промежутку времени, в течение которого оно произошло. aср = DV/Dt. Мгновенная скорость, равна пределу отношения приращения радиус-вектора к промежутку времени, за который оно произошло при устремлении к нулю величины этого промежутка или, что по определению тоже самое, производной от вектора перемещения по времени:dr/dt:
Средняя скорость прохождения пути: Vср=DS/Dt
|
Преобразования Галилея. Инвариантность пространственных и временных интервалов в классической физике. Законы преобразования скоростей и ускорений.
преобразования Галилея: x' = x - Vt; y' = y; z' = z; t' = t; x = x' + Vt'; y' = y; z' = z; t' = t.
Согласно преобразованиям Галилея: одновременность - инвариант преобразований. События, одновременные в одной СО, одновременны в любой другой системе отсчета, движущейся относительно нее равномерно прямолинейно; временной и пространственный интервалы - инварианты преобразований Галилея. радиус-век торы произвольных точек A и B в этих СО в приближении классической механики связаны между собой следующими соотношениями:
Из э их соотношений следует, что пространственный интервал Dr = |Dr| не зависит от выбора СО: |Dr'| = |r'B- r'A| = |rB- rA| = |Dr|. Пространственный интервал в классической механике есть абсолютная величина по отношению к выбору СО
Закон преобразования скоростей. Скорость частицы при переходе от описания движения в одной СО к описанию движения в другой изменяеется в соответствии со следующим уравнением, называемым законом преобразования скоростей: v = v' + V, где u - абсолютная скорость u' - относительная скорость V - переносная скорость от носительные скорости материальных точек не зависят от выбора СО u'B- u'A = uB- uA.
Закон преобразования ускорений. Если все точки СО S' движутся с одинаковым ускорением aс относительно лабораторной СО, то, дифференцируя выражение по времени, получим закон преобразования ускорений: a = a' + ac, где a - абсолютное ускорение; a' - относительное ускорение; aс- пере носное ускорение
|
||
Движение материальной точки по окружности и его кинематические характеристики: вектор элементарного углового перемещения, угловая скорость и перемещение
Движение частицы по окружности. При движении частицы по окружности меняется только направление ее радиус-вектора r(t). Уравнение, характеризующее изменение положения материальной точки со временем, имеет вид: r(t) = r·er(t), (2.1) где r = const; er - единичный вектор, направленный вдоль r.
Понятие вектора элементарного углового перемещения. Рассмотрим движение частицы, происходящее по окружности, в полярных координатах. Поскольку в данном случае частица
обладает одной степенью свободы, ее
движение удобно характеризовать
зависимостью угловой координаты
(угла) от времени j(t)
и может быть описано следующим образом: По аналогии с понятием вектора элементарного перемещения dr введем понятие вектора элементарного углового перемещения dj. За величину вектора dj примем значение угла, на который повернется частица во круг оси OZ за время dt, выраженное в радианах. Направление век тора dj зададим таким об разом, что бы оно совпадало с осью вращения и определялось в соответствии с правилом буравчика или правого винта Из
выше из ложен но о следует, что век
тора линейного и углового перемещений
связаны не за висят от вы бора положения
тела отсчета (точки O) на оси вращения
где [dj, r] - векторное произведение dj и r.
Вектора
угловой скорости и ускорения. По
аналогии с линейной скоростью введем
понятие мгновенной
угловой скорости.
Ею называется величина, равная
производной от вектора углового
перемещения по времени:
Вектором углового ускорения e называется физическая величина, равная производной
от угловой скорости по времени:
|
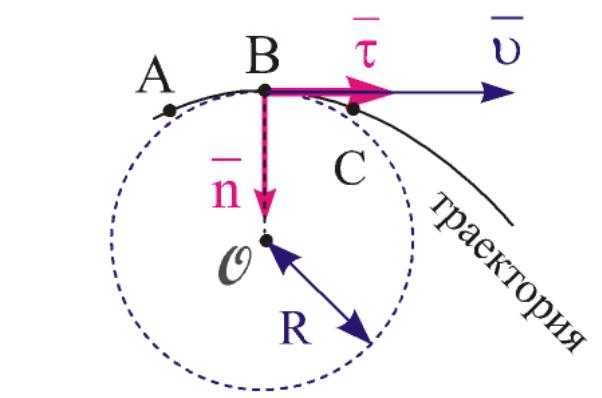
Описание криволинейного движения материальной точки: понятие радиуса кривизны траектории, нормального и тангенциального направлений. Полное, нормальное и тангенциальное ускорения и их физический смысл.
Век
тор a
называется
вектором полного
ускорения материальной
точки. Он определяет величину и на
правление изменения ее скорости.
Величина вектора полно о ускорения
равна
Нормальное ускорение характеризует изменение скорости по на правлению.
Тангенциальное ускорение характеризует изменение скорости по величине. . Вектор
тангенциального ускорения равен
|
Абсолютное твердое тело. Виды движения твердого тела. Разложения движения твердого тело на слагаемые движения. Описание поступательного и вращательного движения твердого тела.
Абсолютно твердым телом называется тело, расстояние между любыми точками которого с течением времени не из меняется.
Существуют следующие виды движения АТТ: поступательное;( Поступательным движением называется та ой вид движения тела, при ко тором все его точки перемещаются по параллельным траекториям.) вращательное вокруг закрепленной оси; вращательное вокруг закрепленной точки; плоское; произвольное свободное движение.
Поступательным движением твердого тела называют такое движение, при котором любая прямая, проведенная в теле, остается при движении параллельной своему первоначальному направлению.Поступательное двнжение может быть и прямолинейным, и криволинейным. Свойства поступательного движения определяются следующей теоремой: «При поступательном движении все точки тела описывают одинаковые (совпадающие при наложении) траектории и имеют равные по модулю и направлению скорости и ускорения» Задавать поступательное движение можно, например, с помощью трех декартовых координат любой точки тела, являющихся функциями времени. Вращением вокруг неподвижной оси называют такое движение твердого тела, при котором две какие-либо точки, принадлежащие телу, остаются неподвижными. Прямую, проходящую через эти точки, называют осью вращения тела. Перемещение тела из одного положения в другое называют поворотом. Все точки тела, лежащие на оси вращения, неподвижны. Все точки, не лежащие на оси вращения, описывают окружности, плоскости которых перпендикулярны оси вращения, а центры расположены на оси.
|
Роль выбора системы отсчета в динамике. Закон инерции (первый закон Ньютона). Инерциальные системы отсчета. Принцип относительности Галилея.
Роль выбора СО в динамике. С точки зрения кинематики все СО равно правны, т. е. выбор любой из них допустим для описания движения. Иначе обстоит дело в динамике - разделе механики, изучающем движе ние с учетом его при чин. Закон инерции (первый закон Ньютона). Инерциальные СО. существуют такие системы отсчета, в которых тело, не подвергнутое внешним воздействиям, движется равномер но прямолинейно или покоится. Системы отсчета, в которых выполняется закон инерции, называются инерциальными. Пример. Геоцентри ческая система. Принцип относи тельности Галилея. все механические явления в инерциальных системах отсчета протекают одинаково; законы механики одинаковы во всех ИСО.
|
||
Описание движения несвободных частиц в инерциальных системах отсчета. Понятия силы и массы. Второй закон Ньютона. Процедура измерения массы, свойства массы. Понятия импульса материальной точки. Второй закон Ньютона в импульсной форме. Область применимость второго закона Ньютона.
Частица, которая не изменяет в результате взаимодействия с другими телами свои свойства (например массу), но изменяет характеристики своего состояния (радиус-вектор и скорость) называется несвободной. Важно, что изменение характеристик состояния несвободной частицы происходит под влиянием внешнего воздействия Сила - физическая величина, являющаяся мерой воздействия одного тела или поля на другое тело. Второй закон Ньютона. ускорение, приобретаемое частицей при действии на нее произвольных сил, равно отношению векторной суммы этих сил к массе частицы. Масса является мерой инертности тела по отношению к внешнему воздействию. В этой связи ее называют инертной массой. Свойства массы:
Массу можно измерить независимым образом, не используя второй закон Ньютона. Тогда наличие у частицы с определенной массой ускорения может служить мерой силового воздействия, т. е. F = m·a, Понятия импульса: импульс p, равный произведению массы частицы на вектор ее скорости: p = m·V Закон движения частицы в импульсной форме: ƩFi = ma = mdV/dt = d(mV)/dt = dp/dt. в ИСО скорость изменения импульса частицы равна векторной сумме действующих на нее сил. применим исключительно к описанию поведения линейных систем |
Действие и противодействие, третий закон Ньютона. Примеры его проявления. Область применимость третьего закона Ньютона.
Третий закон Ньютона: любая пара тел действует друг на друга с сила ми, равными по величине и направленными в противоположные стороны вдоль прямой, соединяющей эти тела. Пример взаимодействия парашютиста, на спине которого укреплен двигатель с пропеллером, с воздушной массой. Сила F1, воздействующая на лопасти пропеллера (а следовательно и парашютиста),со стороны слоев воздуха, равна по величине силе F2, воздействующей на эти слои со стороны пропеллера.
Действующая и противодействующая силы имеют ряд особенностей. Эти силы: - имеют одинаковую физическую природу; -равны по величине при любых перемещениях взаимодействующих тел друг относительно дру а; приложены к разным те лам; -направлены вдоль прямой, соединяющей центры( центры масс) взаимодействующих тел. Пример. Баскетболист, успешно забивший мяч в корзину, зависает на кольце. Силы упругости и тяжести Fупр и Fт, приложенные к баскетболисту, - силы разной природы и поэтому не являются противодействующими. Противодействующей силе тяжести будет сила гравитационного притяжения Земли баскетболистом Fгр, приложенная к Земле.
Область применимости третьего закона Ньютона. Всегда ли справедлив третий закон Ньютона в формулировке равенства сил действия и противодействия? Оказывает я, что нет. Третий закон Ньютона при рас смотрении взаимодействия движущихся физических удаленных объектов носит приближенный характер. При непосредственном контактном взаимодействии третий закон Ньютона выполняется строго
|
Понятие инерциальной системы отсчета. Силы инерции и их свойства. Причины возникновения сил инерции. Существуют системы отсчета, в которых свободная частица движется равномерно и прямолинейно или покоится. Системы отсчета, в которых выполняется закон инерции называются инерциальными. Например, система Коперника, в которой тела движутся с незначительным центростремительным ускорением, направленным к центру Земли, является инерциальной лишь в некотором приближении. Гелиоцентрическую систему, связанную с Солнцем, можно считать инерциальной с большим приближением к истине.
Силы
инерции обусловлены ускоренным
движением системы отсчета относительно
измеряемой системы, поэтому в общем
случае следует учитывать следующие
случаи возниконовения этих сил: 1) силы
инерции при ускоренном поступательном
движении системы отсчета; 2) силы
инерции, которые действуют на тело,
покоящееся во вращающейся системе
отсчета; 3) силы инерции, которые
действуют на тело, движущееся во
вращающейся системе отсчета.
Рассмотрим
эти случаи.
Силы
инерции при ускоренном поступательном
движении системы отсчета
Силы
инерции, действующие на тело, движущееся
во вращающейся системе отсчета
|
Описания движения в инерциальных системах отсчета, движущихся поступательно. Принцип эквивалентности Эйнштейна.
принцип эквивалентности Эйнштейна. Все физические явления в однородном поле силы тяжести про исходят совершенно так же, как и в однородном поле сил инерции.
|
||
Неинерциальные вращающиеся системы отсчета. Центробежная сила инерции. Сила Кориолиса, кориолисово ускорение.
Системы отсчета, которые движутся относительно инерциальной системы с ускорением, называются неинерциальными основной
закон динамики для неинерциальных
систем отсчета:
Если тело покоится относительно равномерно вращающейся системы отсчета, то сумма всех сил, действующих на тело, и центробежной силы инерции равна нулю. Это утверждение называется принципом Даламбера. Центробежная сила инерции направлена против вектора центростремительного ускорения и равна по величине центростремительной силе: FЦБ=mω2r FЦБ=-mω2rn Центробежная сила инерции и сила тяжести эквиваленты. Силы Кориолиса В НСО тело движется с нормальным ускорением и на него действует центробежная сила инерции. Причем соблюдая следубщие условия: a’=an ускорение направлено к центру вращения, F=Fцб? Сила направлена от центра т.е против вектора ускорения. FK =-2m[ωv’] Кориоловское ускорение a=ak+ac+a’, ac-центростремительное ускорение, a’-относительное ускорение, ak-кориоловское ускорение Причины наличия кориоловского ускорения:
|
Импульс системы. Закон изменения импульса. Закон сохранения импульса и отдельных его компонент. Импульс как универсальная характеристика состояния системы.
Импульсом
системы
P
называется
величина, равная векторной сумме
импульсов pi
составляющих ее частиц.
Закон изменения импульса. скорость изменения импульса системы равняется век торной сумме внешних сил, действующих на частицы
этой системы.
Закон сохранения импульса. импульс замкнутой системы или системы, для которой действие всех внешних сил скомпенсировано, сохраняется.
Импульс как универсальная характеристика системы. Универсальность импульса проявляет я в следующих его чертах: -через понятие массы изменение импульса частицы определяет результат взаимодействия с другими объектами системы; -импульс системы аддитивная, в отличие от скорости, величина. -импульс системы величина, которая сохраняется для систем, на которые не действуют внешние силы. -импульс является характеристикой любых материальных, а не только механических объектов (на при мер, световых квантов).
|
Понятия центра масс. Закон движения центра масс. Понятия Ц-системы и ее преимущества при описании движения.
Центром масс системы называется точка, радиус-вектор которой rc за дается уравнением:
rc = Ʃ(miri)/Ʃmi = Ʃ(miri)/M, где mi и ri - масса и радиус-век ор i-й частицы системы; M
-
масса
системы. Скорость
движения центра масс.
Закон движения центра масс. Центр масс системы движется так же, как двигалась бы частица с массой, равной массе системы, под действием силы, равной векторной сумме всех внешних сил, действующих на входящие в систему частицы. ƩFi = MdVc/dt. dP/dt = MdVc/dt;
Понятие Ц-системы. Система отсчета, связанная с центром масс, называется Ц-системой.
|
Работа сил. Мощность. Консервативные и неконсервативные силы. Диссипативные силы. Расчет работы в однородном поле силы тяжести. Расчет работы сил упругости и работы в поле центральных масс.
Работа постоянной силы равняется скалярному произведению векторов силы и перемещения. A1-2 = |F|·|Dr|·cos(a) = (F, Dr). Дж=1Нм Работа переменной силы: dA=(F,dr)=Fdrdr=FϮdr Свойства работы: Работу совершает только тангенциальная составляющая силы: dA =FϮdr Работа результирующей силы равна алгебраической сумме работ ее составляющих Работа на перемещении ∆r равна сумме работ на отдельных участках траектории
Мощность. Мгновенной мощностью называется величина, равная отношению элементарной работы к промежутку времени, за который была совершена эта работа:N = dA/dt, Единица измерения мощности - ватт (Вт).Вт=1Нм/с Средняя мощность: Nср=A12/∆t
Понятие консервативных и неконсервативных сил. Диссипативные силы Силы, работа которых не зависит от формы траектории и вида движения при переходе системы из начального состояния в конечное, и определяется взаимным положением тел системы, называются консервативными. К неконсервативным относятся диссипативные силы – силы, которые могут быть представлены в виде: = -h(υ)·υ.
Работа
в однородном поле силы тяжести: Работа
в однородном поле силы тяжести не
зависит от формы траектории, а
определяется начальным и конечным
положением тела. Aт=mg∆rcos( Работа сил упругости: работа силы упругости определяется начальной и конечной деформации тела(пружины) и не зависит от вида и характера его движения. Aупр=-(kx22/2-kx12/2)
или Aупр= Работа в поле центральных масс: Центральными называются силы, которые направлены к центру силового поля и зависят только от расстояния до этого центра A1-2=
|
||
Кинетическая энергия материальной точки и твердого тела. Теорема об изменении кинетической энергии. Рассмотрим произвольное движение материальной точки массой под действием результирующей силы Fτ= m·aτ= m·dυ/dt Свойства кинетической энергии -кинетическая энергия твердого тела − скалярная величина, являющаяся характеристикой его движения; -кинетическая энергия системы тел равна сумме их кинетических энергий. Теорема об изменение кинетической энергии: изменение кинетической энергии системы тел равно работе всех сил, действующих на тела этой системы A=∆EK
|
Потенциальная энергия системы тел. Причины изменения потенциальной энергии. Свойства потенциальной энергии. Связь силы и потенциальной энергии.
|
Полная механическая энергия системы. Законы изменения и сохранения полной механической энергии. Понятие потенциальной ямы потенциального барьера.
Полная механическая энергия системы :E=Eк+Eп
Эксперимент показывает, что полная механическая энергия может изменяться в результате следующих причин: ♦внешнего воздействия на систему (толчки, приближение к гравитирующемутелу, действие заряженных тел и т. п.); ♦наличия внутренних неконсервативных сил. Например, силы трения качения и сил сопротивления вызывают уменьшение механической энергии шара, катящегося по горизонтальной поверхности стола.
Закон изменения полной механической энергии: изменение полной механической энергии системы равно работе неконсервативных сил ΔE = Aнкс Системы, в которых работа неконсервативных сил равняется нулю, называются консервативными. Закон изменения полной механической энергии: Изменение полной механической энергии системы равно работе всех внешних сил и внутренних неконсервативных сил ΔE = Aвнеш+ Aвнутрнкс
Закон сохранения полной механической энергии: 1. Aкс= ΔEп Полная механическая энергия консервативной системы сохраняется.
2.Aвнутркс= ΔEп Полная механическая энергия замкнутой системы, в которой действуют только консервативные силы, не изменяется.
Понятия потенциального барьера и потенциальной ямы
|
Понятие момента силы относительно закрепленной точки. Расчет момента сил относительно закрепленной оси.
Моментом силы М относительно произвольной точки О называется векторное произведение радиус-вектора частицы r, проведенного из точки О в точку приложения силы F, на вектор этой силы: M=[r, F] Величина вектора момента силы рассчитывается:M=rFsin(α)=FR, где R= rsin(α)=плечо силы Момент силы относительно закрепленной оси: Моментом силы относительно закрепленной оси Z называется величина, равная проекции вектора момента сил М на данную ось, взятого относительно произвольной точки О, расположенной на этой оси. Mz=[r, F]z . Найдем значение твердого тела М. Разложим эту силу на три составляющих: F=F||+Ft+Fn, F||-составляющая. Момент силы относительно точки О можно представить M=M||+Mt+Mn Моменты M|| и Mn перпендикулярны оси вращения и их проекции на ось равны нулю->Mz=Mtz=|M|cos(β)=rFt cos(β)=RFt Момент силы относительно закрепленной оси характеризует способность силы вращать тело относительно данной оси.
|
||
Момент инерции. Вычисление момента инерции относительно оси вращения.
Момент инерции. Моментом инерции частицы массой m относительно оси вращения называется величина, равная: I=mR2 I=ƩmiRi2 , следовательно момент инерции твердого тела зависит от •массы тела; •формы и размеров тела; •распределения массы относительно оси вращения.
Теорема Штейнера Момент инерции тела относительно произвольной оси вращения равен сумме момента инерции этого тела, взятого относительно параллельной ей оси, которая проходит через центр масс, и произведения массы тела на квадрат расстояния между осями. Момент инерции относительно оси Z равен: I0=ƩmiRci2 , а момент инерции относительно Z’ равен I=ƩmiRi2 Преобразуем: I=ƩmiRi2=Ʃmi(d+ Rci)2= Ʃmid2+ ƩmiRci2+2 Ʃmi(d+ Rci)= d2Ʃmi+ ƩmiRci2 +2(d, Ʃmi Rci) ->I=I0+md2
Произведение момента инерции частицы на угловое ускорение равно результатирующему моменту сил, действующих на эту частицу: M=Iε
|
Кинетическая энергия вращающегося тела. Кинетическая энергия твердого тела, совершающего плоское движение. Теорема Кёнига.
Расчет кинетической энергии твердого тела, совершающего вращательное движение
Ei=
mi·Vi2/2
= mi·ω2·Ri2/2,
-> Кинетическая энергия твердого тела, совершающего плоское движение. Любое плоское движение твердого тела массой можно представить как комбинацию вращательного движения в СО, связанной с центром масс Цсистеме), и поступательного движения относительно лабораторной системы отсчета (ЛСО).
Рассчитаем кинетическую энергию твердого тела как сумму кинетических энергий его частей (материальных точек) Теорема Кёнига Кинетическая энергия твердого тела равняется сумме кинетических энергий его поступательного и вращательного движений Eкв Цсистеме.
|
Основной закон динамики вращательного движения твердого тела. Условие равновесия твердого тела.
|
Момент импульса материальной точки и твердого тела. Момент импульса твердого тела относительно закрепленной оси. Уравнение моментов. Законы изменения и сохранения момент импульса.
Момент импульса частицы: Моментом импульса L частицы А относительно точки О называется величина, равная векторному произведению радиус-вектора частицы r на ее импульс p: L=[r,p]=m[r,v] В общем случаи модуль момента импульса частицы равен: L=rmvsin(α)=Rmv Момент импульса частицы относительно закрепленной оси не зависит от выбора точки О на этой оси. Момент импульса твердого тела: Рассмотрим твердое тело совершающее вращательное движение вокрг оси с угловой скоростью ω Моментом импульса тела называется величина, равная векторной сумме моментов импульса его частей: L=ƩLi=Ʃ[ri,pi]=Ʃmi[ri,vi] проекция моментов импульса на ось Z равна: Lzi=Rimivi=Ri2mi ωz -> Lz= ƩLzi= ƩLicos(β)= ƩRi2mi ωz=I ωz Закон изменения момента импульса: Моментом импульса системы называется величина L , равная векторной сумме моментов импульсов отдельных ее частей Li, взятых относительно одной и той же точки выбранной системы отсчета
Скорость изменения момента импульса системы равна векторной сумме моментов внешних сил, действующих на части этой системы. Закон сохранения момента импульса: Момент импульса системы тел сохраняется неизменным при любых взаимодействиях внутри системы, если результирующий момент внешних сил, действующих на нее, равен нулю.
|
||
Свободный гироскоп и его свойства. Элементарная теория свободного гироскопа. Гироскопические эффекты. Применение гироскопов.
Гироскопом называется любое тяжелое симметричное тело, вращающееся вокруг оси симметрии с большой угловой скоростью.
Гироскоп, воздействие внешних сил на который скомпенсировано, называется свободным. Свободный гироскоп обладает тремя степенями свободы
Свободный гироскоп обладает следующими характерными свойствами:
Гироскопический эффект Силы Fp, возникающие в подшипниках, в которых закреплена ось несвободного гироскопа, препятствующие его прецессии, называются гироскопическими силами. Возникновение гироскопических сил в различных устройствах и системах называется гироскопическим эффектом.
Применение гироскопов
Компас. Свободный гироскоп сохраняет свою ориентацию в пространстве (например, направление на Полярную звезду) независимо от направления движения объекта с гироскопом и возможных толчков. Заметим, что пользоваться этим компасом можно только в течение ограниченного времени, пока силы трения в подшипниках не “уведут” ось гироскопа. Устройство управления курсом торпед. Ось гироскопа сохраняет свое направление на цель, в то время как ее ориентация относительно корпуса торпеды при ее движении может меняться. В этом случае включаются двигатели, производящие корректировку направления движения торпеды. Автопилот в летательных аппаратах. В данном случае используются два гироскопа. Один задает положение горизонтальной плоскости, а второй направление в этой плоскости. Успокоитель качки на кораблях.
|
Гармонические колебания. Линейный осциллятор. Законы гармонических колебаний. Параметры гармонический колебаний и их физический смысл.
Понятие гармонических колебаний. Линейный осциллятор. Гармоническими называются колебания, которые описываются величиной, изменяющейся во времени по закону синуса или косинуса. Физическая
система, поведение которой описывается
уравнением гармонических колебаний,
называется линейным (гармоническим)
осциллятором.
Параметры гармонических колебаний и их физический смысл: Постоянные величины А, ω, входящие в уравнение, называются параметрами колебания. Физический смысл: Величина А, равная наибольшему отклонению колеблющейся физической величине от положения равновесия, называется амплитудой колебания |x|=xmax =A
ω =2п/T, то циклическая чистота ω есть число колебаний осциллятора за 2п секунд. Величина, обратная периоду колебаний Т, называется частотой ν=1/T= ω/2п. Частота есть число колебаний осциллятора за 1 секунду. Единицы измерения частоты- герц. 1 Гц=1 с-1 Мгновенное значение физической величины x определяется фазой колебаний Ф, равной: Ф= ωt+
|
Уравнение движений механический линейных осцилляторов: пружинный маятник, математический маятник, физический маятник. Условие гармоничности колебаний. Расчет собственной частоты этих осцилляторов.
1.
Пружинный
маятник —
это груз массой m, который подвешен на
абсолютно упругой пружине и совершает
гармонические колебания под действием
упругой силы F = –kx, где k — жесткость
пружины. Уравнение движения маятника
имеет вид
Математический
маятник —
это идеализированная система, состоящая
из материальной точки массой m, которая
подвешена на нерастяжимой невесомой
нити, и которая колеблется под действием
силы тяжести. Хорошее приближение
математического маятника есть небольшой
тяжелый шарик, который подвешен на
длинной тонкой нити. Момент инерции
математического маятника
|
Затухание колебаний при наличии вязкого трения. Коэффициент затухания, логарифмический декремент затухания, добротность. Случаи малого и большого трения. Механическая энергия затухающих колебаний.
|
||
Вынужденные колебания под действием гармонической силы. Переходный и установившийся режимы. Резонанс амплитуды. Амплитудно-частотные резонансные характеристики, их зависимость от коэффициента затухания. Физический смысл добротность. Вынужденные колебания под действием гармонической силы.
Переходной и установившийся режимы колебаний. Колебания, которые будут совершаться после затухания собственных колебаний, называются установившимися вынужденными колебаниями. Процесс установления этих колебаний называется переходным режимом Установившиеся колебания не зависят от начальных условий и описываются уравнением: х = A·cos(·t + ). Частота вынужденных колебаний равна частоте вынуждающей силы, а амплитуда A и сдвиг фаз смещения относительно внешней силы зависят от значений собственной частоты колебаний w0, частоты вынуждающей силы и коэффициента затухания Явление
резкого увеличения амплитуды вынужденных
колебаний при определённой частоте
вынуждающей силы называется резонансом.
|
Постулаты специальной теории относительности. Преобразования Лоренца. Кинематические эффект специальной теории относительности: эффект сокращения длины. Эффект замедления времени.
В основе специальной теории относительности лежат два принципа или постулата, сформулированные Эйнштейном в 1905 г. Принцип относительности: все законы природы инвариантны по отношению к переходу от одной инерциальной системы отсчета к другой. Это означает, что во всех инерциальных системах физические законы (не только механические) имеют одинаковую форму. Таким образом, принцип относительности классической механики обобщается на все процессы природы, в том числе и на электромагнитные. Этот обобщенный принцип называют принципом относительности Эйнштейна. Принцип постоянства скорости света: скорость света в вакууме не зависит от скорости движения источника света или наблюдателя и одинакова во всех инерциальных системах отсчета. Скорость света в СТО занимает особое положение. Это предельная скорость передачи взаимодействий и сигналов из одной точки пространства в другую. Относительность промежутков времени (замедление времени)
Относительность длин (расстояний)
Преобразования
координат, удовлетворяющие постулатам
специальной теории относительности,
называются преобразованиями
Лоренца.
Если ИСО
K' движется
относительно ИСО K с постоянной
скоростью
|
О применимости второго закона Ньютона в релятивистском случае. Релятивистский импульс. Основной закон релятивистской динамики.
Основной закон релятивистской динамики. Краткие выводы Специальная теория относительности – это новое учение о пространстве и времени, пришедшее на смену классическим представлениям. В основе СТО лежит положение, согласно которому никакая энергия, никакой сигнал не может распространяться со скоростью, превышающей скорость света в вакууме. При этом скорость света в вакууме постоянна и не зависит от направления распространения. Это положение принято формулировать в виде двух постулатов Эйнштейна – принципа относительности и принципа постоянства скорости света. Область применения законов классической механики ограничена скоростью движения материального объекта: если скорость тела соизмерима со скоростью света, то необходимо использовать релятивистские формулы. Таким образом, скорость света в вакууме является критерием, определяющим границу применимости классических законов, т.к. она является максимальной скоростью передачи сигналов. ависимость массы движущегося тела от скорости движения определяется соотношением
Релятивистский
импульс тела и соответственно уравнение
динамики его движения
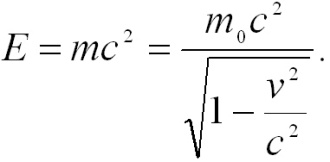
Изменение скорости в релятивистской механике влечет за собой изменение массы, а, следовательно, и полной энергии:
В СТО выполняется закон сохранения релятивистской массы и энергии: изменение полной энергии тела сопровождается эквивалентным изменением ее массы:
Физический смысл этого соотношения заключается в следующем: существует принципиальная возможность перехода материальных объектов, имеющих массу покоя, в электромагнитное излучение, не имеющее массы покоя; при этом выполняется закон сохранения энергии. Это соотношение является важнейшим для ядерной физики и физики элементарных частиц.
|
|
 )=
-(mgh2-mgh2)
)=
-(mgh2-mgh2)
 =-(G
=-(G -
- )
Работа в
однородном поле тяжести, поле центральных
сил и работы сил упругости не зависят
от формы пути и характера движения, а
определяются начальным и конечным
положением тел в системе.
)
Работа в
однородном поле тяжести, поле центральных
сил и работы сил упругости не зависят
от формы пути и характера движения, а
определяются начальным и конечным
положением тел в системе.




Пространство и время. Свойства пространства и времени. Системы отсчета и их роль в описании движения.
Общая характеристика про странства и времени. Из опыта вы знаете, что окружающий нас мир непрерывно меняется. При этом изменения носят двойственный характер. С одной стороны, про исходит движение наблюдаемых объектов или их частей друг относительно друга, а с другой – сами объекты модифицируются с течением времени.
Поскольку пространство и время являются фундаментальными понятиями, то зададим их через характеристики
физических объектов и процессов, которые могут быть измерены. Пространство отражает такие черты тел, как протяженность и по рядок их взаимного расположения. Время отражает такие особенности процессов, как последовательность и длительность. Пространство и время бесконечны.
Свой ства времени: непрерывность, однород ность и одномерость. В классической механике считается, что
время непрерывно, т. е. события на шкале времени могут располагаться сколь угодно близко друг к другу.
Опыт показывает, что абсолютной характеристикой по отношению к выбору начала отсчета времени является временной интервал Dt, равный длительности промежутка между мгновениями, отвечающими началу t0 и концу tк какого-либо процесса: Dt = tк- t0 > 0.
Эквивалентные про межутки времени инвариантны(неизменны) по отношению к выбору начала его отсчета. В этом выражается одно из важнейших свойств времени - однородность.
Однородность време ни проявляется в неизменности физических законов по отношению к моменту проведения испытаний.
Еще одним важным свойством времени является его одномерность. Это свойство проявляется в том, что для указания момента наступления какого-либо события или его длительности до статочно лишь одного числа.
Основные свойства пространства: трехмерность, однородность, изотропность, непрерывность.
Классическая механика опирается на геометрию Евклида. Согласно ей окружающий нас мир, а следовательно, и пространство являются трехмерными, т. е. для задания положения материальной точки в пространстве необходимо указать три числа.
Пространственный интервал инвариантен по отношению к выбору начала отсчета системы координат, что обусловлено таким свойством пространства, как однородность.
Однородность пространства проявляется в независимости физических законов от положения исследуемой физической системы в пространстве.
Итак, инвариантность пространственного интервала по отношению к выбору СК обусловлена такими свойствами пространства, как изотропность и однородность
Система отсчета представляет собой совокупность тела от счета, связанной с ним системы координат, и синхронизованных часов.
Роль системы отсчета в описании механического движения. Выбор СО произволен, и, как показывает опыт,
механическое движение выглядит в них по-разному. Однако, существуют величины, неизменные по отношению к законам преобразования координат, с помощью которых осуществляется переход к описанию движения в разных СО. В рамках классической механики, рассматривающей движение тел с малыми скоростями, примерами таких вел чин служат временной и пространственный интервалы. В связи с изложенным, с точки зрения решения задачи о нахождении положения тела в пространстве в любой момент времени систему отсчета целесообразно выбирать так, чтобы движение по отношению к ней описывалось максимально просто. При этом сама СО выполняет роль инструмента для изучения законов механического движения.