

19. Плоскость
Определение
Плоскость
![]() определяется точкой
определяется точкой
![]() и нормальным вектором
и нормальным вектором
![]() (т.е.
(т.е.
![]() ).
).
Нормальный вектор
![]() плоскости
- любой ненулевой вектор перпендикулярный
любому вектору, лежащему в плоскости
.
плоскости
- любой ненулевой вектор перпендикулярный
любому вектору, лежащему в плоскости
.
Вывод уравнения плоскости в Декартовой системе координат

Точка
![]()
![]()
![]() .
.
Но
![]() ,
,
![]() .
Значит
.
Значит
![]() (*)
(*)
Получили уравнение
плоскости с нормальным вектором
,
проходящей через точку
![]() .
.
Преобразуем (*):
![]()
![]() (**)
(**)
Получили каноническое уравнение плоскости.
Неполное уравнение плоскости
Рассмотрим (**)
1.
![]() начало координат (точка
начало координат (точка
![]() )
принадлежит плоскости
)
принадлежит плоскости
2.
![]() ,
т.к.
,
т.к.
![]() ,
значит плоскость параллельна
,
значит плоскость параллельна
3.
![]() ,
значит плоскость параллельна
,
значит плоскость параллельна
4.
![]() ,
значит плоскость параллельна
,
значит плоскость параллельна
![]()
Угол между плоскостями
Углом между плоскостями называется угол между их нормальными векторами:
![]()
Таким образом:
1. Плоскости параллельны, если их нормальные векторы колинеарны.
![]()
2. Плоскости перпендикулярны, если их нормальные векторы ортогональны.
![]()
[_]
20. Вывод канонического уравнения сферы. Шар. Эллипсоид
Сфера
Сфера – поверхность,
каждая точка которой равноудалена от
некоторой фиксированной точки
(центра сферы) на положительное расстояние
![]() (радиус сферы).
(радиус сферы).
Вывод канонического
уравнения сферы радиуса
![]() с центром
с центром
![]()
![]() сфере
сфере
![]()
![]()
![]()
Шар
Шар радиуса с центром в :
шару
![]()
![]()
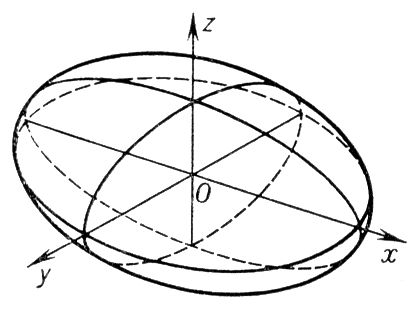
Эллипсоид
Эллипсоид – поверхность с каноническим уравнением

[_]
21. Определение линейного пространства строк
Пусть - натуральное фиксированное число.
![]() - множество строк длины
- множество строк длины
![]()
Операции на
![]()
Сложение:
![]()
Умножение на
![]() :
:
![]()
Определение. с операциями сложения и умножения на число называется линейным пространством строк длины . Элементы называются -мерными векторами.
Вектор
![]() называется нулевым
вектором.
называется нулевым
вектором.
[_]
22. Линейная независимость и линейная зависимость векторов: определения, примеры
Определение
Система векторов
![]() (
(![]() )
называется линейно
независимой,
если из равенства
)
называется линейно
независимой,
если из равенства
![]() следует, что
следует, что
![]() и линейно
зависимой,
если
и линейно
зависимой,
если
![]() ,
не все равные
нулю, такие
что
.
,
не все равные
нулю, такие
что
.
Следствие
Если к линейно
зависимой системе
![]() добавить какие-то векторы
добавить какие-то векторы
![]() ,
то полученная система останется линейно
зависимой. Действительно,
,
не все равные
нулю, но
,
то полученная система останется линейно
зависимой. Действительно,
,
не все равные
нулю, но
Тогда
![]() .
Значит
.
Значит
![]() - линейно зависимая система.
- линейно зависимая система.
Лемма
- линейно зависимая система векторов тогда и только тогда, когда хотя бы один из векторов этой системы равен линейной комбинации остальных векторов.
Доказательство
Векторы
линейно зависимы
,
не все равные нулю
![]() :
:
![]()

![]() Пусть
Пусть
![]()
Тогда
![]()
Значит - линейно зависимы.
Теорема
В векторы

("бегущая единица") линейно независимы.
Доказательство
Пусть
![]()

![]()
Пример. Частные случаи линейной зависимости системы векторов в .
![]() .
По лемме
.
По лемме
![]() образуют линейно зависимую систему
хотя бы один из них линейно выражается
через другой вектор
образуют линейно зависимую систему
хотя бы один из них линейно выражается
через другой вектор
![]() или
или
![]()
![]() - коллинеарные вектора. Следовательно,
два вектора линейно независимы
они неколлинеарны.
- коллинеарные вектора. Следовательно,
два вектора линейно независимы
они неколлинеарны.
![]() .
По лемме
.
По лемме
![]() линейно зависимы
хотя бы один из них линейно выражается
через остальные векторы
например,
линейно зависимы
хотя бы один из них линейно выражается
через остальные векторы
например,
![]()
![]() - компланарные векторы. Следовательно,
3 вектора линейно независимы
они некомпланарны. В частности,
- компланарные векторы. Следовательно,
3 вектора линейно независимы
они некомпланарны. В частности,
![]() некомпланарны
- линейно независимые векторы.
некомпланарны
- линейно независимые векторы.
![]() .
Любые 4 вектора
.
Любые 4 вектора
![]() линейно зависимы. Действительно, если
компланарные, то они линейно зависимы
и, следовательно,
линейно зависимы. Действительно, если
компланарные, то они линейно зависимы
и, следовательно,
![]() линейно зависимы. Если
не компланарные, то
линейно зависимы. Если
не компланарные, то
![]() равен их линейной комбинации (см. билет
№9) и, следовательно,
линейно зависимы.
равен их линейной комбинации (см. билет
№9) и, следовательно,
линейно зависимы.
[_]