

Работа силы. Мощность.
Одна из основных характеристик силы, оценивающих действие силы на тело при некотором его перемещении.
Э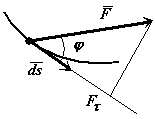 лементарная
работа силы
скалярная величина равная произведению
элементарного перемещения на проекцию
силы на это перемещение.
лементарная
работа силы
скалярная величина равная произведению
элементарного перемещения на проекцию
силы на это перемещение.
 .
.
 ,
,

Элементарная работа силы равна скалярному произведению силы на элементарное перемещение или на дифференциал радиуса вектора точки приложения силы.

Элементарная работа силы равна скалярному произведению элементарного импульса силы на скорость точки.

Мощностью силы называется величина, определяющая работу, совершаемую силой в единицу времени. В общем случае мощность равна первой производной по времени от работы.
 ,
, 
Мощность равна скалярному произведению силы на скорость.
Единицей
измерения мощности в СИ является –

В
технике за единицу силы принимается
 .
.
Кинетическая энергия точки и механической системы. Теорема кенига
К инетической
энергией матер. т-ки называется величина
равная половине произведения ее массы
на квадрат скорости:
инетической
энергией матер. т-ки называется величина
равная половине произведения ее массы
на квадрат скорости:
К инетической энергией механической системы называется сумма кинетических энергий всех входящих в нее материальных.
Теорема Кенига. Кинетическая энергия системы в абсолютном движении складывается из кинетической энергии центра масс, если в нем сосредоточить всю массу системы, и кинетической энергии системы при ее движении относительно центра масс.
Кинетическая энергия при поступательном вращательном и плоском движении
Кинетической энергией системы называется скалярная величина Т, равная арифметической сумме кинетических энергий всех точек системы
![]()
1.
Поступательное
движение.
В этом случае все точки тела движутся
с одинаковыми скоростями, равными
скорости движения центра масс. То
есть, для любой точки
![]()
![]()
или
![]()
Таким образом, кинетическая энергия тела при поступательном движении равна половине произведения массы тела на квадрат скорости центра масс. От направления движения значение Т не зависит.
2. Вращательное движение
![]()
![]()
т. е. кинетическая энергия тела при вращательном движении равна половине произведения момента инерции тела относительно оси вращения на квадрат его угловой скорости. От направления вращения значение Т не зависит.
При вращении тела вокруг неподвижной точки кинетическая энергия определяется как
![]()
![]()
где
Ix,
Iy,
Iz
– моменты инерции тела относительно
главных осей инерции x1,
y1,
z1
в неподвижной точке О
;
![]() ,
,
![]() ,
,
![]() – проекции вектора мгновенной угловой
скорости
– проекции вектора мгновенной угловой
скорости
![]() на эти оси.
на эти оси.
3. Плоское движение. При этом движении скорости всех точек тела в каждый момент времени распределены так, как если бы тело вращалось вокруг оси, перпендикулярной к плоскости движения и проходящей через мгновенный центр скоростей Р
![]() ,
,
где
![]() -
момент инерции тела относительно
названной выше оси, w-
угловая скорость тела.
-
момент инерции тела относительно
названной выше оси, w-
угловая скорость тела.
![]() .
.
Следовательно, при плоскопараллельном движении кинетическая энергия тела равна энергии поступательного движения со скоростью центра масс, сложенной с кинетической энергией вращательного движения вокруг центра масс.
Теорема об изменении кинетической энергии
Эта теорема существует в двух формах.
Теорема. Дифференциал кинетической энергии системы равен сумме элементарных работ всех внешних и внутренних сил, действующих на систему.

Теорема. Изменение кинетической энергии системы при ее перемещении из одного положения в другое равно сумме работ всех внешних и внутренних сил, действующих на систему, на соответствующих перемещениях точек системы при том же перемещении системы..

Потенциальное силовое поле. Потенциальная энергия
Часть пространства, в которой на помещенную туда материальную точку действует сила, зависящая от места положения точки, называется силовым полем.
Причем, эта сила определяется с помощью силовой функции u = u(x, y, z). Если она не зависит от времени, то такое поле называется стационарным. Если во всех точках она одинакова, то поле –однородное.
Если же проекции силы на декартовы оси есть частные производные от силовой функции по соответствующим координатам
![]() ,
, ![]() ,
, ![]() ,
,
то такое поле называется потенциальным.
Потенциальная энергия, часть общей механической энергии системы, зависящая от взаимного расположения частиц, составляющих эту систему, и от их положений во внешнем силовом поле Численно П. э. системы в данном её положении равна работе, которую произведут действующие на систему силы при перемещении системы из этого положения в то, где П. э. условно принимается равной нулю (П = 0).
Возможные перемещения
Возможным перемещением точки материальной системы будем называть ее бесконечно малое перемещение, допускаемое связями этой системы.
Возможные перемещения точек системы должны удовлетворять двум условиям:
1) они должны быть бесконечно малыми, так как при конечных перемещениях система перейдет в другое положение, где условия равновесия могут быть другими;
2) они должны быть такими, чтобы при этом все наложенные на систему связи сохранялись, так как иначе мы изменим, вид рассматриваемой механической системы (система станет другой).
Возможным
перемещением системы мы будем называть
любую совокупность бесконечно малых
перемещений точек системы, допускаемых
в данный момент всеми наложенными на
систему связями. Возможное
перемещение любой точки системы будем
изображать элементарным вектором ![]() ,
направленным в сторону перемещения.
,
направленным в сторону перемещения.
В общем случае для точек и тел системы может существовать множество возможных различных перемещений.
Принцип возможных перемещений
Если в некотором положении механической системы с двусторонними идеальными связями приложенные к ней силы уравновешиваются, то на любом возможном перемещении системы из этого положения сумма работ задаваемых сил равна 0.
![]()
Силы и моменты сил инерции
СИЛА ИНЕРЦИИ — векторная величина, численно равная произведению массы т материальной точки на модуль её ускорения w и направленная противоположно ускорению
Момент инерции
величина, характеризующая распределение масс в теле и являющаяся наряду с массой мерой инертности тела при непоступательном движении. В механике различают М. и. осевые и центробежные. Осевым М. и. тела относительно оси z называется величина, определяемая равенством:
![]()
Центробежным М. и. относительно системы прямоугольных осей х, у, z, проведённых в точке О, называют величины, определяемые равенствами:
![]()