

1) Объект описывается уравнением инерционного звена;
2) Объект описывается уравнением колебательного звена.
Неустойчивые объекты под влиянием любого малого возмущения выходят из равновесного состояния и отклонение растет со все возрастающей скоростью.
Неустойчивые объекты имеют внутреннюю положительную обратную
связь.
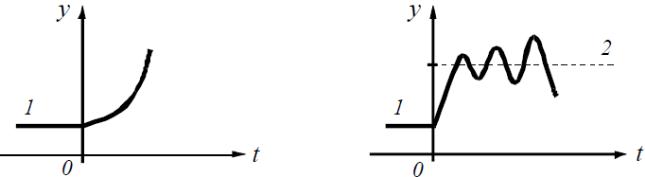
Рис. 1.19. Переходная характеристика неустойчивого объекта
Например, ядерный реактор.
При увеличении числа нейтронов, увеличивается число делящихся ядер, что приводит к дальнейшему росту числа нейтронов деления и скорости протекания реакции.
Например, автокаталитические реакции.
При химической реакции образуется вещество, являющееся катализатором для данной химической реакции, что приводит к дальнейшему росту скорости протеканияреакции.
Нейтрально устойчивые объекты под влиянием скачкообразного
воздействия выходят из равновесного состояния и отклонение растет с по-
стоянной скоростью.
Нейтрально устойчивые объекты не имеют внутреннюю обратную
связь.

Рис. 1.19. Переходная характеристика нейтрально устойчивого объекта:
объект описывается уравнением интегрирующего звена
Влияние устойчивости на процесс регулирования:
“+” – устойчивый объект легче поддается регулированию: самовыравнивание способствует стабилизации регулируемого параметра.
При большом самовыравнивании можно обойтись и без регулирования.
“–” – в нейтрально устойчивых и особенно в неустойчивых объектах регулирование необходимо.
8. Автоматические регуляторы и законы регулирования
Автоматическим регулятором называется техническое устройство, которое уменьшает или совсем ликвидирует отклонение регулируемого параметра от его заданного значения.
В состав автоматического регулятора включают:
• управляющий элемент – логическое устройство (или микропроцессор);
• измерительное устройство – датчик;
• исполнительный механизм – привод;
• регулирующий орган – клапан, задвижка, шибер, и т.п.
Создавать для управления разнообразными объектами свой регулятор – невозможно из экономических соображений. Конечно, в ряде случаев для труднорегулируемых объектов или когда требуется особое качество регулирования, например, для управления синхрофазотроном или стартовым комплексом космодрома, именно так и поступают.
Однако, для массового промышленного применения используется небольшое количество законов регулирования, которые позволяют качественно управлять почти всеми промышленными объектами. При этом для каждого объекта достаточно подобрать параметры настройки регулятора для достижения требуемого качества регулирования.
С позиций ТАР автоматический регулятор (далее регулятор) рассматривают как динамическое звено с передаточной функцией WР .
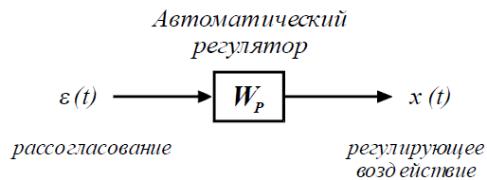
Рис.1.20. Автоматический регулятор как динамическое звено
Замечание. Автоматический регулятор представляет устройство, преобразующее по определенному закону свои входные сигналы в выходные, т.е. регулятор описывается определенным, как правило, дифференциальным уравнением вида: x = f(ε ).
Говоря о законах регулирования, обычно регулирующий орган рассматривают как
часть регулятора. Таким образом, под законом регулирования понимают зависимость
регулирующего воздействия от входного сигнала регулятора – рассогласования.
Наибольшее распространение в промышленности получили линейные регуляторы, в которых используются следующие основные законы регулирования:
Таблица 1.2.
Типовые законы регулирования
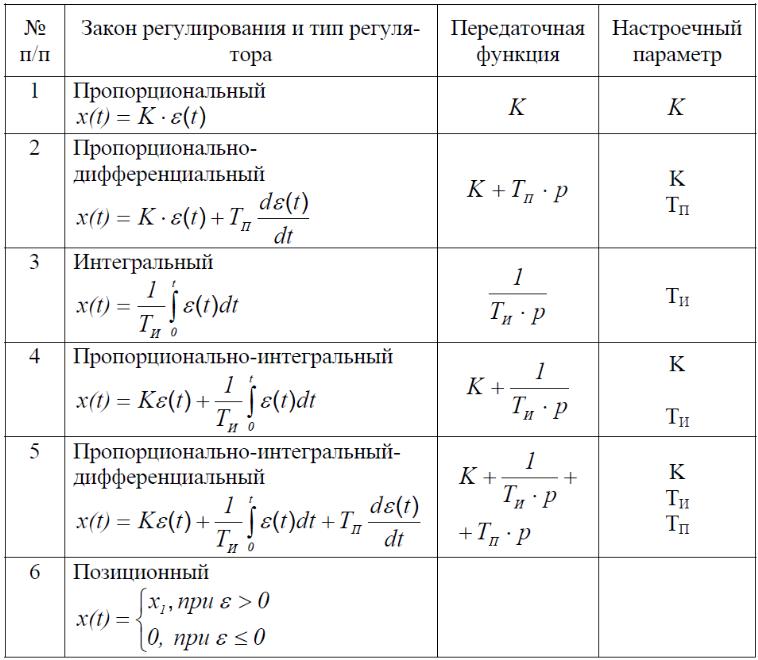
Автоматические регуляторы, которые работают по одному из этих законов сокращенно обозначаются П-, ПД-, И-, ПИ- и ПИД-регуляторами.