

Основной цикл работы процессора
Этапы:
Выборка команды(IF)
Формирование исполнительных адресов операндов, если требуется (AM).
Выборка операндов из памяти (OF).
Исполнение операции (EX).
Запоминание результата (ST).
Проверка запроса программного прерывания (IRQ).
Каждый этап выполняется за один цикл памяти.
При обработке этих этапов используется конвейерный способ (при выполнении очередного этапа одновременно происходит выполнение предыдущего этапа следующей команды). Разумеется, если одна команда изменяет содержимое какой-либо ячейки памяти, а следующая использует ее новое значение, то последняя не может начать исполняться, пока результат не будет сохранен). Основной смысл конвейера – обеспечение компромисса между временем ожидания команды и пропускной способностью процессора.
-
IF
AM
OF
EX
ST
IRQ
IF
AM
OF
EX
ST
IRQ
IF
AM
OF
EX
ST
IRQ
Возможны два вида прерываний:
программное прерывание, которое обрабатывается путем выполнения процессором специальной программы - обработчика прерываний;
аппаратное, реализуется без участия программы процессора с помощью аппаратных средств, имеет высокий приоритет и может поступать в любой момент времени, прерывая выполнение текущей команды.
Пример: Пусть требуется описать этапы цикла процессора при реализации команды Аddax,Mem1
-
Add
Режим адресации AX
(K+0
15 8 7 0
Mem 1
(K+2
В
 ыборка
и дешифрация первого слова команды.
ыборка
и дешифрация первого слова команды.
Выборка второго слова команды.
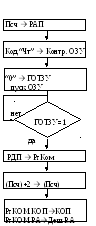
Псч Рап|
Код “чт” Контр. ОЗУ | Обозначим в дальнейшем
“0” ГОТЗУ | “ЧТ”ЗУ
Ожидание ГОТЗУ = 1 |
РДП БуфРг
Псч + 2 Псч
Выборка операнда из Mem1.
БуфРг Рап
“ЧТ”ЗУ
РДП РгBXАЛУ (BXодин из ронов АЛУ)
Исполнение операции.
РгAX +РгBX РгBX
Учет переносов
{Qi}РгССП (Регистр Слова Состояния Процессора)
Для описания элементарных операций, составляющих процесс выполнения команды используется язык межрегистровых передач (ЯМРП), любой оператор которого описывается в следующем виде:
<ОП_ЯМРП> : : = [ метка ] условие : список _ действий
Где
Условие – булевское выражение, содержащих временную привязку списка действий к такту процессора.
Список _ действий – набор микрокоманд выполняемых параллельно в данном такте
Микрооперация – действие, выполненное за один такт генератором.
Совокупность микроопераций, выполняемых за один такт, называют микрокомандой.
Последовательность микрокоманд реализующих всю команду называют микропрограммой.
|
|
ВЫБК.& ГОТЗУ & Т1: Псч ША (У1), ША РАП (У2) |
|
0 ГОТЗУ |
ВЫБК.& ГОТЗУ & Т2: “Чт” ШУ (УЗ), ШУ РгУ Контр. (У4) “0” Рг сост. Контр. ГОТЗУ |
|
Псч + 2 Псч Рг ком. К&П Дш. ком. Рг ком. РА ДШРА |
ВЫБК.& ГОТЗУ & Т3: РДП ШД (У6), ШД Рг ком. (У7), Псч + 2 Псч. (У8), Рг ком. ДШ ОП (У9) Рг ком. РА ДШ РА (У10) |
6
Аппаратный (или на основе жесткой логике) - WiredLogic
Аппаратный способ формирования управляющих сигналов основывается на создание автомата управление и реализации его схемным (аппаратным) образом.
Под автоматом понимается абстрактный дискретный процесс который определяется тремя множествами:
Множество состояний процесса S= {S1,S2, . . . ,Sn}.
Это множество конечно – конечные автоматы.
Множество входных воздействий X= {X1,X2, . . . ,Xn} в дискретные моменты времениti .
В качестве входного воздействия рассматриваются коды операции, режимы адресации, тактовые сигналы Ti, состояния устройствQiи некоторые другие.
Множество выходных сигналов Y= {Y1,Y2, . . . ,Yn} в дискретные моменты времениti .
X– называют входной алфавит автомата,Y– называют выходной алфавит автомата
Функции:
Переходов: как автомат переходит в следующее состояние
T: S x X S | S (t + ) = [s(t),x(t)] > 0
Выходов | = [s(t),x(t)] это соответствует поведению
R:SxXY|Y(t+) = | автомата Мили (Mealy)
| = S(t+) это соответствует поведению
автомата Мура (Moore)
Отличие:
Mealy- сигнал вырабатывается в момент перехода (импульсный).
Moore- сигнал вырабатывается в состоянии (потенциальный).
(- время задержки между тактами (длина такта))

Эта схема у которой выходные сигналы определяются входными сигналами в данный момент времени. Память обеспечивает задержку на один такт .
Отметим следующее:
Основной недостаток формирования управляющего сигнала с помощью автомата является жесткость структуры автомата требующая его переконструирования с изменением входных сигналов и количество состояний.
Синтез и реализация автоматов с большим количеством состояний требует сложных теоретических исследований.
Не регулируемая структура автомата, затрудняющая его реализацию с помощью серийных больших интегральных схем и требует их выполнения в заказном варианте (использование заказных БИС применяется в суперкомпьютерах).
Достоинство: максимально достижимое быстродействие управления выполнением команд.
7
Микропрограммный.- Store (Programmed) Logic
Микропрограммное формирование управляющих сигналов основано на том, что входные сигналы автомата можно представлять как адреса ячеек памяти, которые содержат требуемые комбинации выходных сигналов. Поэтому формирование выходных сигналов можно представить как выборку из памяти, у которой имеется Nвходов, и поэтому можно выбрать содержимое 2nячеек памяти, каждая из которых содержитm-разрядные выходные сигналы {Yi}.
{n}=> ПАМЯТЬ2nячеек памяти (2nвыходныхm-разрядных кодов)
Проблемы:
Каким образом представлять слова памяти?
Как организовать последовательность выбора слов этой памяти для реализации управления выполнения команды?
Идею создания МПУ высказал M.Wilks(Кембридж) в 1950-е годы, но она была реализована только в конце 60Х годов. Сейчас все ЭВМ содержат элементы микропрограммного управления.
На показанной ниже структурной схеме МПУ приняты следующие обозначения:
РгКОМ – регистр команд, КОП – код операции (операционная часть регистра команд),
МПЗУ – микропрограммное запоминающее устройство (хранит микропрограммы для всех машинных команд),
РгАМК – регистр адреса микрокоманды (МК), РгМК – регистр выбранной микрокоманды,
ОПЧМК – операционная часть МК (m`), АЧМК – адресная часть МК (m``)
ФАСлМК – формирователь адреса следующей микрокоманды,
Форм. УС – формирователь управляющих сигналов {Уi}, ГТ – генератор тактов.
