

Министерство образования РФ
Пермский Государственный Технический Университет
Кафедра электрификации и автоматизации горных предприятий
Лабораторная работа №7 «Изучение принципа работы и исследование характеристики тензометрического датчика усилия »
Выполнил:
Ст. гр. РНГМ-05-2
Новицкая Б.С.
Проверил:
Токарев В.В.
Пермь, 2009
1.Цель работы
Целью лабораторной работы является знакомство с устройством и принципом работы тензометрических датчиков усилия, а так же с аппаратурой регистрирующей сигнал этого датчика. В лабораторной работе студенты знакомятся с методами и приемами исследования характеристик этого датчика.
2. Датчики усилия
Различают три типа датчиков усилия и момента: тензометрические, магнитострикционные и пьезометрические
О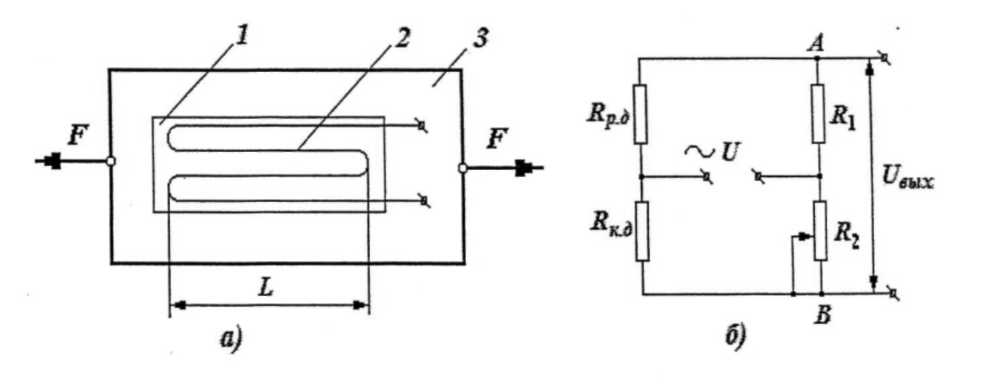 сновой
такого датчика является тензометрический
чувствительный элемент, представленный
на рис1.а.
Тензометрический
чувствительный элемент состоит из
изоляционной подложки 1
и
наклеенной на нее петлевой обмотки 2,
выполненной из тонкой проволоки с
высоким омическим сопротивлением или
вырубленной из микронной фольги с
аналогичными свойствами материала. В
свою очередь, подложка наклеивается на
деформируемый усилием F
элемент
3.
сновой
такого датчика является тензометрический
чувствительный элемент, представленный
на рис1.а.
Тензометрический
чувствительный элемент состоит из
изоляционной подложки 1
и
наклеенной на нее петлевой обмотки 2,
выполненной из тонкой проволоки с
высоким омическим сопротивлением или
вырубленной из микронной фольги с
аналогичными свойствами материала. В
свою очередь, подложка наклеивается на
деформируемый усилием F
элемент
3.
Рис. 1. Тензометрический элемент (а) и его подключение в измерительную схему (б).
При совместной деформации под действием усилия F элемента 3 и тензометрического элемента деформируется подложка 1 с петлевой обмоткой 2. По закону Гука любая продольная деформация тела вызывает появление его поперечной деформации, поэтому при продольной деформации петлевой обмотки на величину ΔL происходит изменение поперечного сечения ее провода (или фольги), что, в свою очередь, по закону Ома вызывает пропорциональное изменение омического сопротивления этой обмотки на величину ΔR.
Э![]() та
пропорциональность может быть отражена
следующей математической зависимостью:
та
пропорциональность может быть отражена
следующей математической зависимостью:
п оэтому
оэтому
где L - длина петлевой обмотки;
R - сопротивление петлевой обмотки.
Даже при значительном удлинении петлевой обмотки величина изменения ее сопротивления составит доли Ома, поэтому, чтобы уверенно зафиксировать изменение выходного сигнала, применяют мостовую схему подключения тензоэлементов, представленную на рис. 1,6. По этой схеме в одно из плеч резисторного моста вводятся сопротивления рабочего и компенсационного тензоэлементов, при этом деформируется только рабочий тензоэлемент с сопротивлением Rр,д , а компенсационный тензоэлемент с сопротивлением Rкд является в этом мосте недеформируемым элементом сравнения.
При отсутствии деформации на измерительном мосте сопротивления рабочего и компенсационного датчиков одинаковы, поэтому напряжение от источника питания ~U в точках А и В будет одинаково, следовательно, и сигнал UВЬх равен нулю. Для балансировки параметров рабочего и компенсационного датчиков в схему вводятся уравновешивающие сопротивления R1 и R2, причем
сопротивление R2 является регулируемым и подключается по схеме потенциометра. Этот потенциометр применяют для настройки нулевого уровня выходного сигнала датчика.
При подаче деформирующей нагрузки на рабочий датчик его сопротивление меняется, а поэтому в точках А и В появляется разность потенциалов, которая фиксируется как выходной сигнал измерительным элементом в этой схеме..