

Министерство по образованию и науке
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КТПМ. МИДЗ 19 - 1.
Структурный и кинематический анализ зубчато-рычажного механизма.
Выполнила: Жукова Наталья,
студентка гр.8ж00
Приняла: Пустовых Ольга Сергеевна,
ассистент.
Томск 2012
Техническое задание.
|
||||||||||||||||||||||||
n |
φ |
β |
AB |
BC |
BD |
e |
z |
z1 |
m |
|||||||||||||||
Об/мин |
град. |
мм |
Шт. |
мм |
||||||||||||||||||||
1400 |
135 |
45 |
20 |
105 |
50 |
80 |
15 |
40 |
1,5 |
|||||||||||||||
|
||||||||||||||||||||||||
|
|
|
|
|
КТПМ.МИДЗ 19-1 |
|||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||
Изм. |
Лист |
№ докум. |
Подп |
Дата |
||||||||||||||||||||
Разраб. |
Жукова |
|
|
Зубчато-рычажный механизм |
Лит. |
Лист |
Листов |
|||||||||||||||||
Провер. |
Пустовых |
|
|
у |
|
|
1 |
1 |
||||||||||||||||
|
|
|
|
ТПУ ИК Группа 8Ж00 |
||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||
Содержание:
Введение……………………………………………………………………4
Структурный анализ механизма………………………………………….5
Расчеты для механизма в заданном положения………………………....8
Расчеты для плана скоростей………………………………………….…9
Расчеты для плана ускорений………………………………………..…..10
Заключение……………………………………………………………….11
Список используемой литературы………………………………………12
Введение.
Механизм - это устройство, предназначенное для преобразования определенного движения ведущих звеньев в другую форму движение ведомых звеньев.
Основная задача механики - определять положение (координаты) движущегося тела в любой момент времени.
Для изучения механизма и принципа действия необходимо построить планы скоростей и ускорений. Благодаря планам можно узнать движение любой точки механизма в любой момент времени его действия.
Планом положения механизма - графическое изображение взаимно расположенных звеньев, соответствующее выбранному моменту времени.
Задача данной работы заключается в том, чтобы научиться определять скорости и ускорения отдельных точек звеньев механизма, а также угловых скоростей и ускорений.
Таблица 2.Структурный анализ механизма.
В соответствии с исходными данными определим параметры зубчатых колес, межосевое расстояние, передаточное число и угловые скорости механизма.
Определяем делительные диаметры колес.
d1=z1∙ m= 15∙1,5 =22,5мм= 0,0225 м; d2=z2∙ m= 40∙1,5 = 60 мм = 0,06 м;
Диаметры окружностей вершин da и впадин зубьев df.
da1=m(z1+2)=1,5∙(15+2)=25,5 мм; df1=m(z1-2,5)=1,5∙(15-2,5)=18,75 мм;
da2=m(z2+2)=1,5∙(40+2)=63 мм; df2=m(z2-2,5)=1,5∙(40-2,5)=56,25 мм;
Межосевое расстояние aw=(d1+d2)/2=(22,5+60)/2=41,25 мм.
Передаточное число u=z2/z1=40/15=2,67;
Угловая скорость ведущего колеса w1=pn/30=3,14∙880/30=92,1 1/с;
Ведомого колеса w2=w1/u=146,6 c-1 . Частота вращения ведомого зубчатого колеса и кривошипа n2=n1/u=1400/2,67=524,34 мин-1.
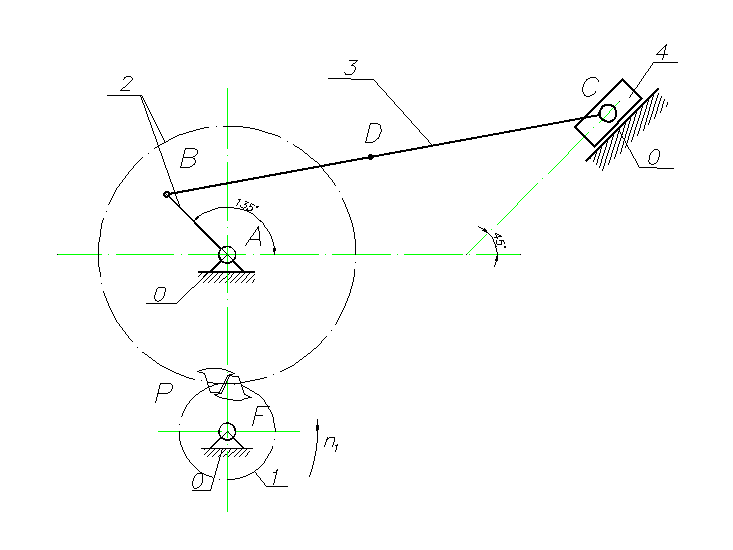
Расставим на схеме механизма буквенные обозначения точек. Точки, обозначающие соединения подвижных звеньев со стойкой удобно обозначать О с индексом номера точки (Е, А, С0 и т.д.) точку соединения кривошипа с шатуном обозначим буквой А. конец шатуна в соединении с ползуном обозначим буквой С.
Проставим на схеме механизма номера звеньев (арабскими цифрами) и номера кинематических пар (римскими цифрами).
Покажем направление угловой скорости ведущего звена.
Схема зубчато-рычажного механизма приведена на КТПМ.ИДЗ 19-1. Механизм состоит из 4 звеньев. Число подвижных звеньев n=4; число кинематических пар пятого класса p5=5 (В1-0, В2-0, В3-2, В3-4, П4-0). Число кинематических пар четвертого класса (двухподвижных) p4=1. Это вращательная пара (ВП2-1), образованная зацеплением зубьев ведущего и ведомого колес.
W=3n-2p5-p4=3·4-2·5-1·1=1;
Следовательно, для определенного движения ведомого звена 4, механизм имеет одно ведущее звено.
Сведем данные структурного анализа в таблицу 1.
В таблице 1 помещаем схемы условные обозначения подвижных звеньев (в рабочем положении), а также схемы кинематических пар, их названия, степень подвижности и условные обозначения кинематических пар. В таблице 2 приводим структурный состав механизма.
Таблица 1
Структурный анализ механизма |
|||||
Подвижные звенья |
Кинематические пары |
||||
Схема |
Наименование |
Схема |
Наименование |
Степ. Подвижности |
Символ |
|
Ведущее колесо |
|
Вращательная, низшая, V класса |
1 |
В1-0 |
|
Зубчатая вращательно-поступательная, IV класса |
2 |
ВП2-1 |
||
|
Кривошип-зубчатое колесо |
||||
|
Вращательная, низшая, V класса |
1 |
В2-0 |
||
|
Шатун |
|
Вращательная, низшая, V класса |
1 |
В3-2 |
|
Вращательная, низшая, V класса |
1 |
В3-4 |
||
|
Ползун |
||||
|
Поступательная, низшая, V класса |
1 |
П4-0 |
||
Число подвижных звеньев: n=4 |
Число кинематических пар: P5=5 P4=1 |
||||
Степень подвижности механизма: W=3n-2p5-p4=3·4-2·5-1·1=1 |
|||||







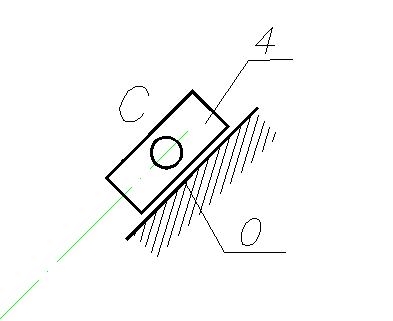
Таблица 2
Структурный состав механизма |
||||
Начальный механизм и структурные группы |
||||
Схема |
Наименование |
Количество звеньев |
Количество кинематических пар |
Формула строения |
|
Начальный вращательный механизм 1 класса |
1 |
1 |
В1-0 |
|
Однозвенная, двухповодковая группа Асура с вращательно-поступательной зубчатой парой и вращательной парой. |
1 |
2 |
[ВП2-1 -В2-0] |
|
2-х звенная, 2-х поводковая группа Ассура с 2 вращательными парами и одной поступательной парой V класса |
2 |
3 |
[В2-3- В3-4 -П4-0] |
Количество начальных механизмов - один |
Количество групп Ассура - две |
|||
Формула строения механизма В1-0-[ВП2-1-В2-0]- [В2-3- В3-4 -П4-0]
Механизм II класса, содержит две группы Ассура, соединение последовательно. |
||||
