

Прогнозирование с использованием α-β фильтра Интервальный прогноз


Где: P11p-дисперсия ошибки прогнозирования координиты
P22p- дисперсия ошибки прогнозирования скорости
P(i)-матрица дисперсии ошибок текущей оценки вектора состояний
Ошибка прогнозирования координаты и скорости:
 Где
Где
 – номер локации,
– номер локации,
 –шаг дискретизации,
–шаг дискретизации,
 - время прогноза
- время прогноза
Ошибка интервального прогнозирования:

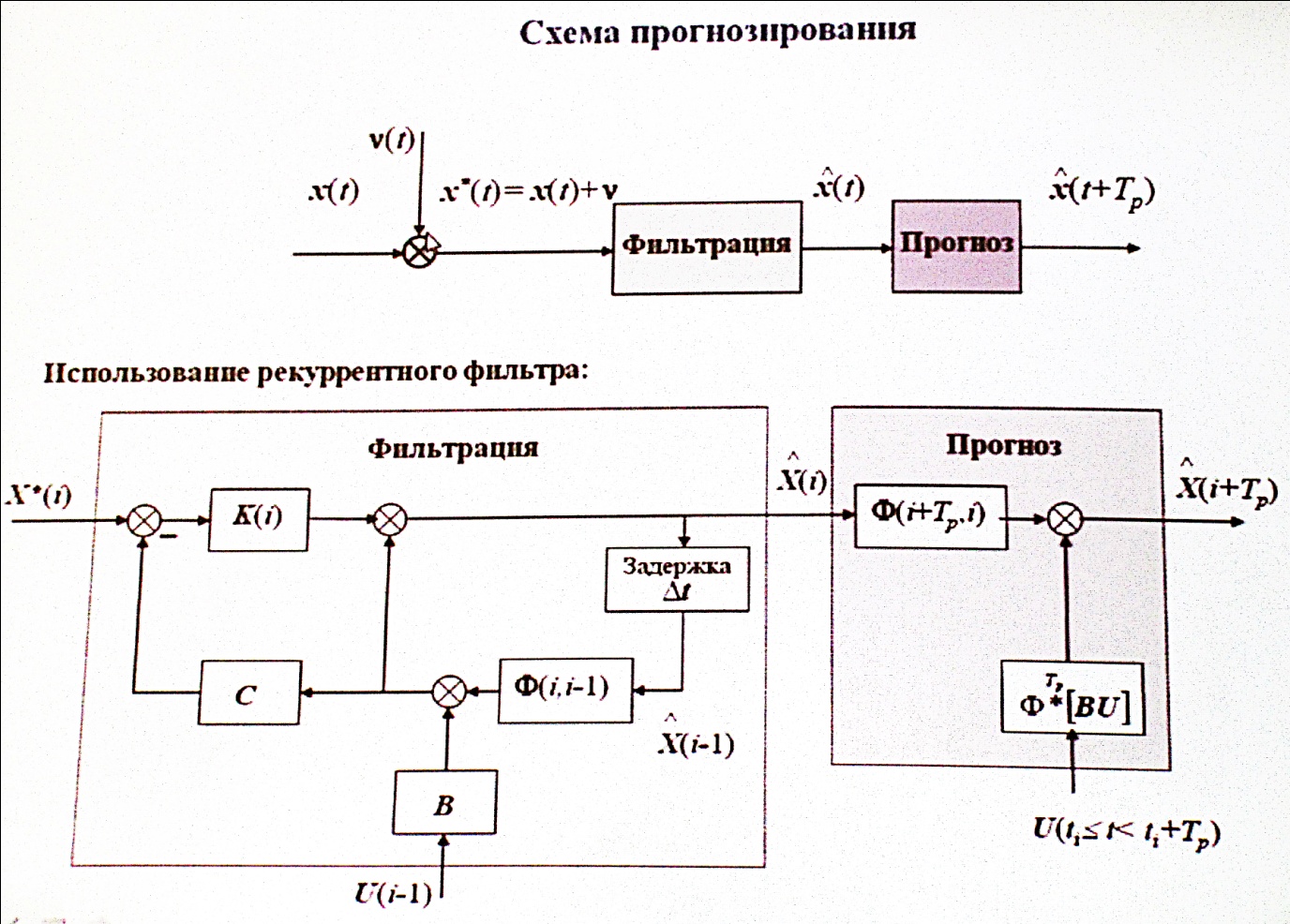
40. Взаємодія процесів фільтрації і прогнозування траєкторії в АС КПР
41. Прогнозирование области неопределённости местоположения ВС

Основные факторы, влияющие на отклонение от плана полёта:
- ветер
- навигационные ошибки
- погрешности траекторных измерений
- неадекватность математических моделей
- погрешности алгоритма оценки траекторных параметров
- ошибки системы управления
- человеческие ошибки (пилота и диспетчера)
Принимается:
Дисперсия отклонения от ЛЗП r постоянна:

Где
 – требования точности имитации RNP
– требования точности имитации RNP
Дисперсия продольного отклонения
 квадратично нарастает
(t)=
квадратично нарастает
(t)=
Где
 –
начальная среднеквадратическая ошибка
определения положения ВС в продольном
движении
–
начальная среднеквадратическая ошибка
определения положения ВС в продольном
движении
Продольное и боковое отклонение взаимно независимы:
Где
 – ковариационная матрица дисперсий
отклонений.
– ковариационная матрица дисперсий
отклонений.
42. Прогнозування повітряного руху для прийняття рішень в ас кпр
В АС УВД производится прогноз местоположения ВС на заданное диспетчером время упреждения (обычно от I до 5 минут) с отображением вектора упреждения.
Достоверность прогнозирования в значительной степени определяется адекватностью принятой математической модели, описывающей прогнозируемый процесс. Важным допущением, принимаемым при математическом прогнозировании является предположение о том, что вид модели процесса, принятый на основании наблюдения за этим процессом, не изменяется на участке прогнозирования ( от момента окончания наблюдений за процессом до момента времени, для которого делается прогноз).
Процесс полета ВС можно рассматривать как движение некоторой динамической системы со случайными начальными условиями и случайными воздействиями на ее входе. В линейном виде такой процесс в общем случае описывается как
 (1)
(1)
где X - вектор состояний размерности п , который может включать координаты самолета, скорость, ускорение, угловые величины и их производные и т.д.; F-матрица, определяющая динамику движения самолета ( п х п ); U - вектор управляющих воздействий (к); В - матрица, распределяющая управления (п х к); G - матрица, распределяющая возмущающие воздействия (п х l); w>- вектор возмущающих воздействий (l ).
Как правило, принимается, что значения управляющих воздействий U известны, а возмущающие воздействия w представляют собой случайный некоррелированный процесс типа «белый шум».
Возможность прогнозирования определяется решением уравнения (1), которое записывается как
 (2)
(2)
где
Ф(t,t0)
-переходная матрица определяющая переход
системы из начального состояния В
состояние для момента времени t.
и обладающая
следующими свойствами:

Прогнозирование вектора состояний на заданное время упреждения t =t +Tp, принимая во внимание тот факт, что поведение чисто случайного процесса w принципиально непредсказуемо, может производиться на основе выражения (2)
 (3)
(3)
или. используя обозначения свертки,
 ,
,
При отсутствии управляющего воздействия (U = 0) вычисление прогнозируемого значения вектора состояний упрощается и выполняется согласно выражения
