

3.4. Анализ чувствительности системы к изменению параметров объекта
Теперь нам нужно произвести анализ чувствительности системы к изменению параметров объект. Эти изменения обусловлены различными внешними факторами – погодными условиями, степенью изношенности системы и т.д.. От таких изменений не застрахована ни одна система, поэтому данный пункт исследовать нужно особо щепетильно.
Составим таблицу (табл. 1.2), в которую включим результаты моделирования.
Таблица 1.2.
|
Изменение, % |
Параметр |
Значение* |
Время регулирования* tр, c |
Перерегулирование* σ, % |
Рисунок |
|
0 |
Т0 |
10 |
1,307 |
1 |
3.1 |
|
k0 |
0,1 | ||||
|
±20 |
Т0 |
8; 12 |
1,09;1,6 |
5;0 |
3.5 |
|
k0 |
0,08; 0,12 |
1,8;1,05 |
0;6 |
3.6 | |
|
±50 |
Т0 |
5;15 |
2,9;2,1 |
16;0 |
3.7 |
|
k0 |
0,05;0,15 |
3,5;1,65 |
0;11 |
3.8 |
Примечание:
* Значения в столбцах указаны через “;”, где первое число означает параметр при изменении в меньшую сторону, второе – изменение в бóльшую.
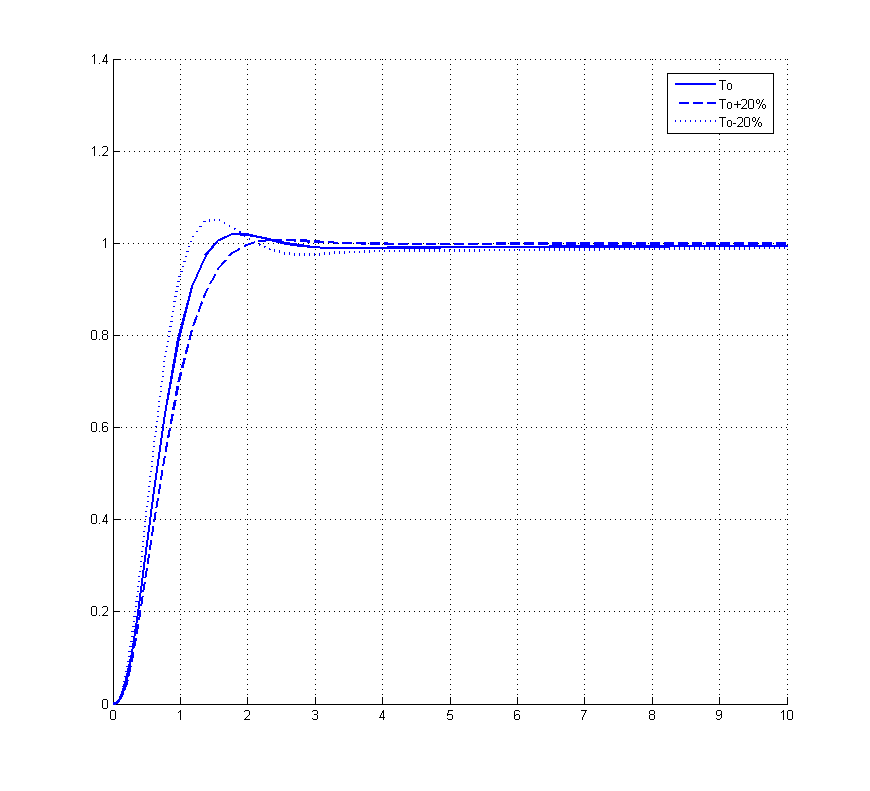
Рис. 3.5. Переходный процесс при изменениях T0 объекта на 20%.
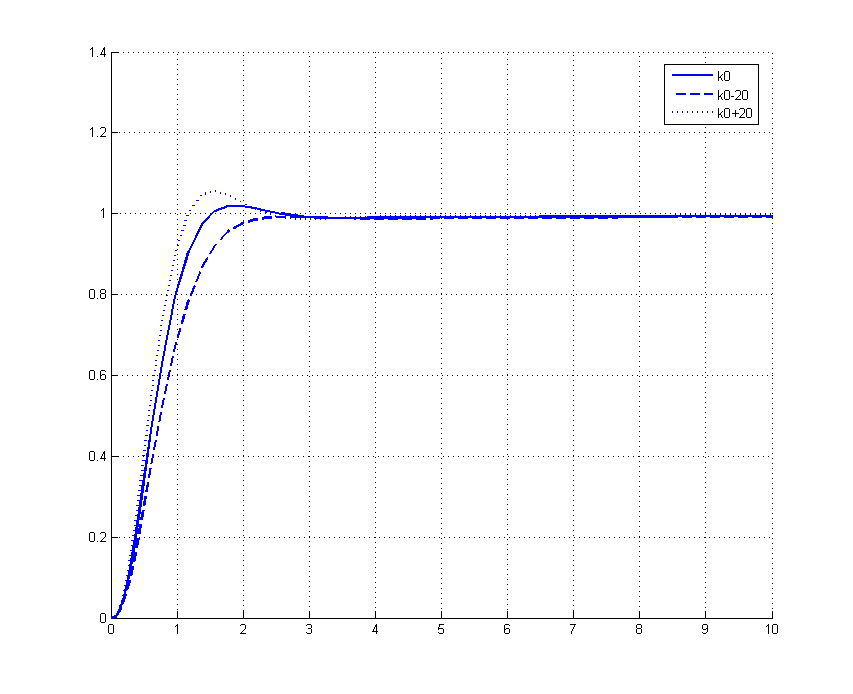
Рис. 3.6. Переходный процесс при изменениях k0 объекта на 20%.
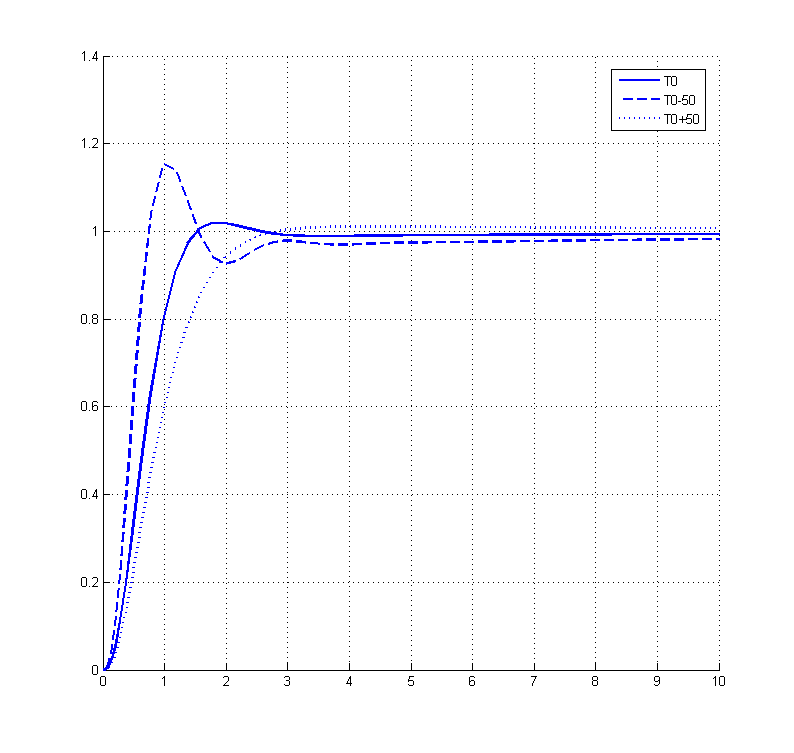
Рис. 3.7. Переходный процесс при изменениях T0 объекта на 50%.

Рис. 3.8. Переходный процесс при изменениях k0 объекта на 50%.
Проанализировав полученные результаты убеждаемся в том, что система достаточно устойчива к варьированию параметров объекта. Ни в каком из вариантов процесс не стал неуправляемым (неустойчивым). Даже при изменении параметров на 50% (рис. 3.7, 3.8) время регулирования остается приемлемым, а перерегулирование не достигает 30%.
3.5. Моделирование системы с нелинейным элементом
До этого момента мы исследовали систему без нелинейного элемента. Однако, реальные системы далеко не такие правильные, и в реальности всегда присутствует нелинейность. В нашем случае, мы полагаем, что регулирующий вентиль не может закрутиться больше, чем нужно для того, чтобы перекрыть трубу целиком(насыщение) и малые движения не влияют на его положение (зона нечувствительности).
Введем насыщение как 25% от максимального значения на входе РВ, чтобы существенно зарезать передвижения вентиля, а зону нечувствительности положим пятипроцентной.
Таким образом, uнас = 0,25xmax = 0.835; ∆неч=0,167.
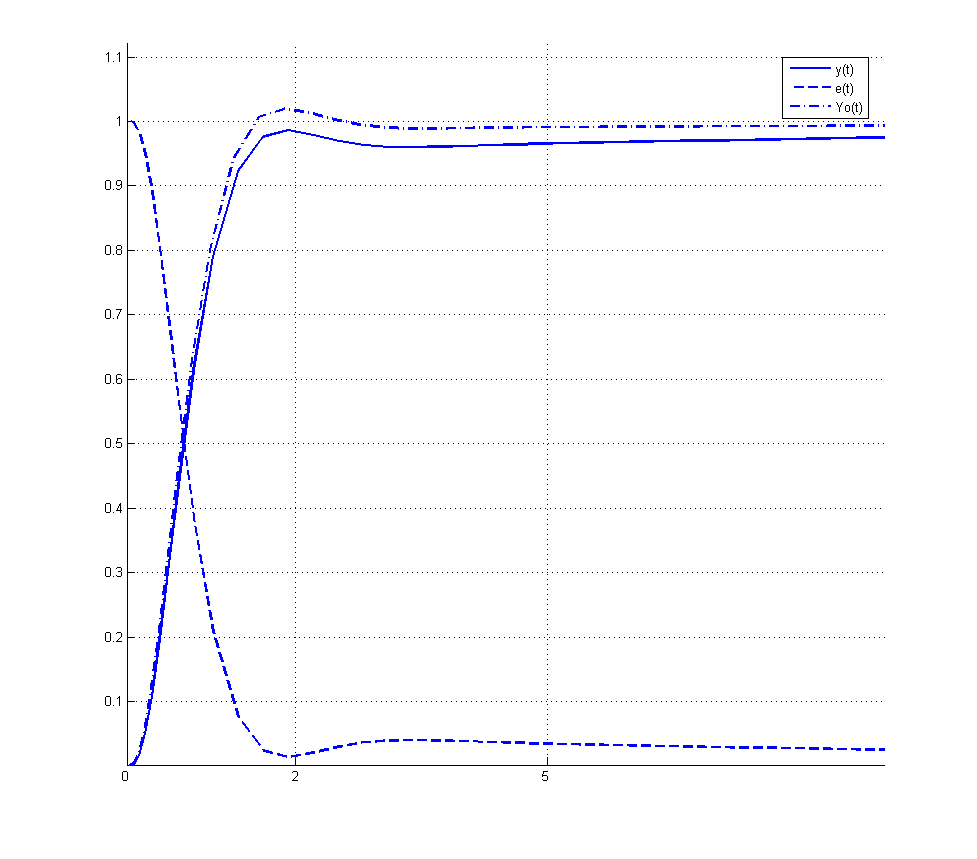
Рис. 3.9. Реакция y(t), y0(t) без НЭ и ошибка e(t) при единичном “ступенчатом” воздействии.
На рис. 3.9 изображен переходный процесс y(t), процесс y0(t) в системе без НЭ и ошибка e(t) при единичном “ступенчатом” задающем воздействии.
Нелинейность регулирующего вентиля начинает проявляться при t = 0,11 с; заканчивается при t=1,55 с. На графике хорошо видно, как процесс y(t) начинает отделяться от y0(t) – вентиль больше не двигается и система начинает “насыщаться”. По аналогии с автомобилем – когда двигатель работает с передаточной функцией 1 (четвертая передача) – колеса (вал) на некоторой скорости начинают опережать двигатель.
Через некоторое время, когда процесс сам доходит до t=1,55 регулирование опять начинает влиять на характер процесса и установившаяся ошибка постепенно приближается к нулю. Естественно, этот процесс требует намного большего времени. Временные характеристики процессов начинают практически сливаться при t > 50 c.
С учетом системы 3.4.а построим графики реакции y(t) и e(t) для возмущающего воздействия (рис. 3.10).
Как видно из графика, нелинейный элемент не так сильно влияет на возмущающее воздействие как этого хотелось бы.
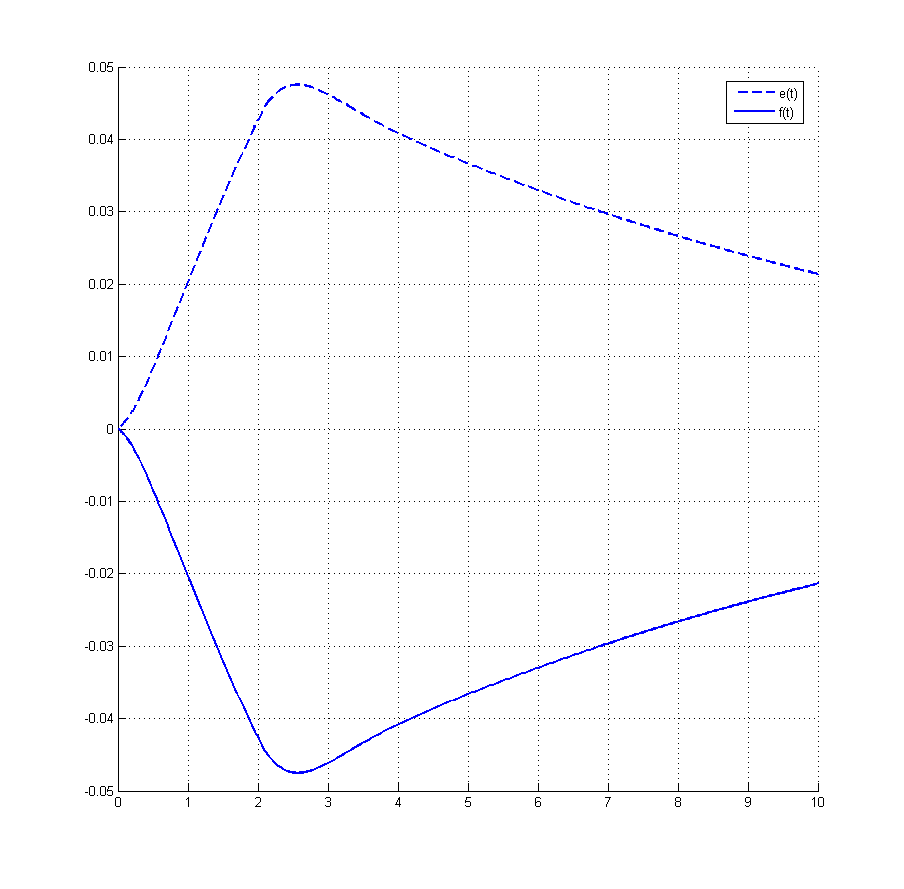
Рис. 3.10. Реакция y(t) и ошибка e(t) для возмущающего воздействия.
Заключение
Мы исследовали систему автоматического регулирования расхода газа. В результате компьютерного моделирования мы получили, что система отлично отрабатывает задающие воздействия и (при условии компенсации возмущения) справляется с отработкой возмущающего. Приближение системы к реальной, а именно ввод нелинейного элемента, не слишком сильно влияет на работу ее работу. То же самое можно сказать про изменение параметров объекта.
Задачи поставленные в данном проекте с заданной степенью приближения были достигнуты.
Список литературы
1. Теория систем автоматического управления // В.А. Бесекерский, Е.П. Попов. М.: Изд-во "Наука" , 1975. 768 с.
2. Теория автоматического управления: Учебник для студентов вузов // С.Е. Душин, Н.С. Зотов, Д.Х. Имаев и др. / Под ред. В.Б. Яковлева. М.: Высш. школа, 2003. 576 с.
3.Основы проектирования следящих систем // Под ред. Н.А. Лакоты. М.: Машиностроение, 1978. Гл.6.