

3.1 Моделирование системы по задающему воздействию
Графики переходных процессов ε(t), у(t), хi(t) на входе НЭ при ступенчатом воздействии представлены на рисунке 3.1.1
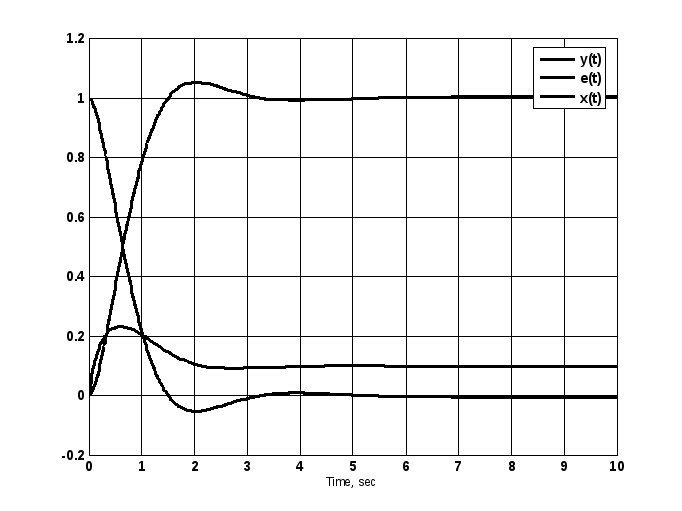
Рисунок 3.1.1
εmax= 1; ymax= 1.052; хimax= 0.233.
εуст= 0; yуст= 1; хiуст= 0.1.
Рассчитаем εуст.:
![]()
![]()
![]()
![]()
Графики переходных процессов ε(t), у(t), хi(t) на входе НЭ при линейно нарастающем воздействии представлены на рисунке 3.1.2.
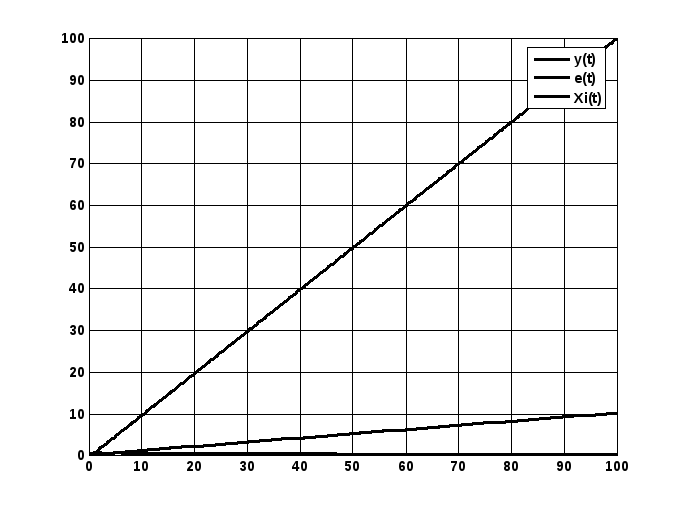
Рисунок 3.1.2
εmax= 0.68; ymax= ∞; хimax= ∞.
εуст= 0; yуст= ∞; хiуст= ∞.
Рассчитаем εуст.:
![]()
![]()
![]()
![]()
3.2 Оптимизация параметров пид-регулятора
Проводим оптимизацию
средствами МАТLАВ.
Получаем следующие параметры:
![]() ;
;![]()
![]() Графики
переходных процессов ε(t),
у(t),
хi(t)
на входе НЭ при ступенчатом воздействии
представлены на рисунке 3.2.1.
Графики
переходных процессов ε(t),
у(t),
хi(t)
на входе НЭ при ступенчатом воздействии
представлены на рисунке 3.2.1.
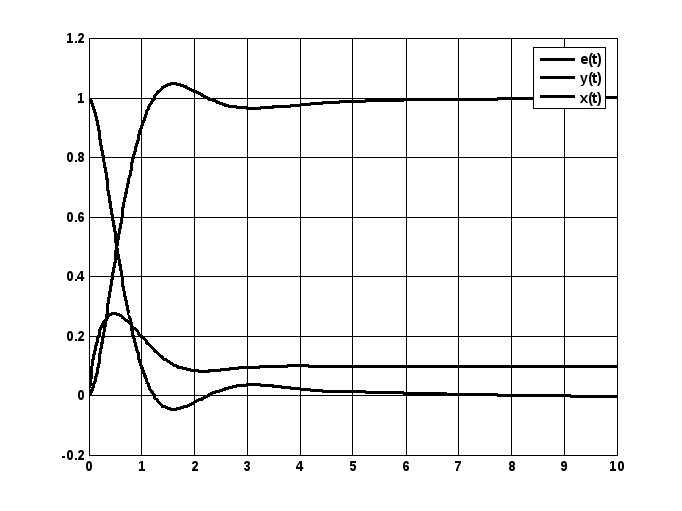
Рисунок 3.2.1
Полученная система имеет следующие показатели качества:
перерегулирование σ = 4.56 %;
время регулирования tр =1.1 с.
εmax= 1; ymax= 1.046; хimax= 0.275.
εуст= 0; yуст= 1; хiуст= 0.1.
3.3 Анализ чувствительности системы
Анализ проводим при изменении Т0, k0 на ±20, ±50. Показатели качества при изменении параметров приведены в таблице 2.
Таблица 2.
|
Изменение, % |
Параметр |
Значение |
Время регулирования tр, c |
Перерегулиро-вание σ, % |
|
Исходные |
Т0 |
2 |
1.1 |
4.56 |
|
k0 |
10 | |||
|
-20 |
Т0 |
1.6 |
2.966 |
3.9 |
|
k0 |
8 |
1.3875 |
1 | |
|
+20 |
Т0 |
2.4 |
1.991 |
5.19 |
|
k0 |
12 |
1.738 |
7.45 | |
|
-50 |
Т0 |
1 |
3.101 |
2.64 |
|
k0 |
5 |
3.895 |
1.1 | |
|
+50 |
Т0 |
3 |
2.646 |
6.18 |
|
k0 |
15 |
1.647 |
11 |
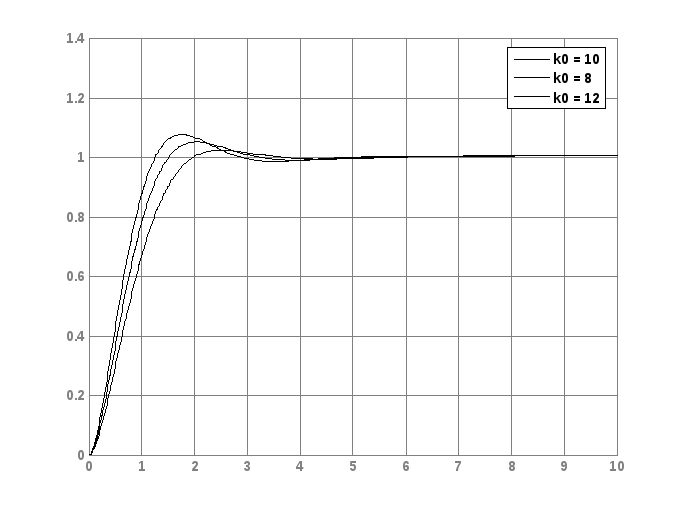
Переходные процессы при изменении Т0 на ±20, ±50; k0 на ±20, ±50 представлены на рисунках 3.3.1, 3.3.2, 3.3.3, 3.3.4 соответственно.
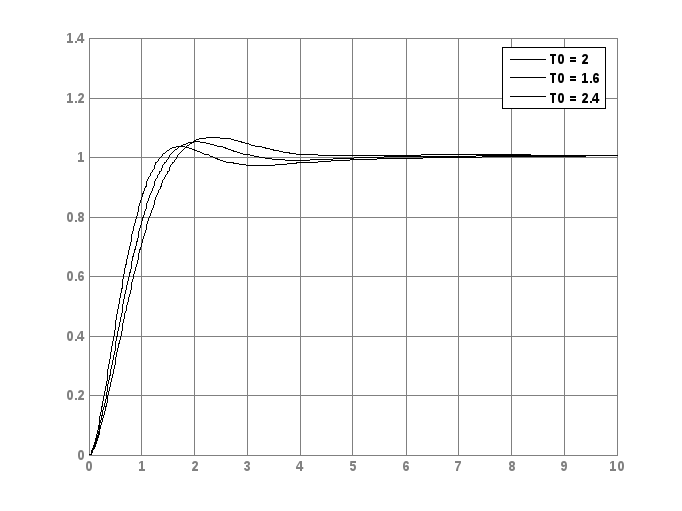
Рисунок 3.3.1
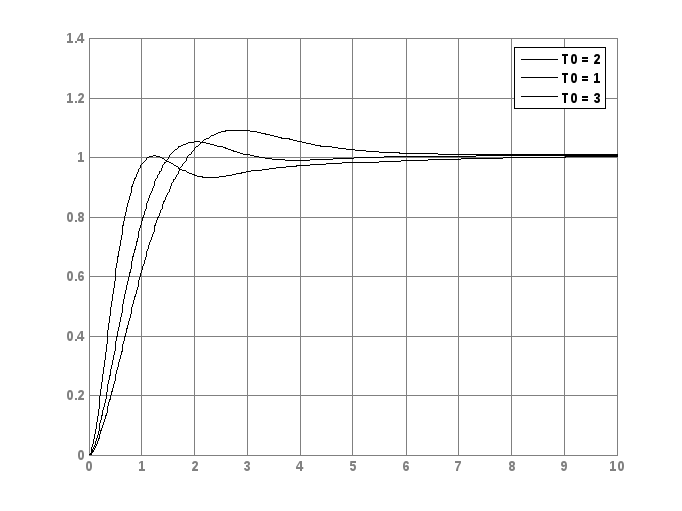
Рисунок 3.3.2
Р исунок
3.3.3
исунок
3.3.3
Рисунок 3.3.4
Результаты показывают, что система является достаточно грубой к изменению параметров объекта регулирования.
3.4 Моделирование системы по возмущающему воздействию
Г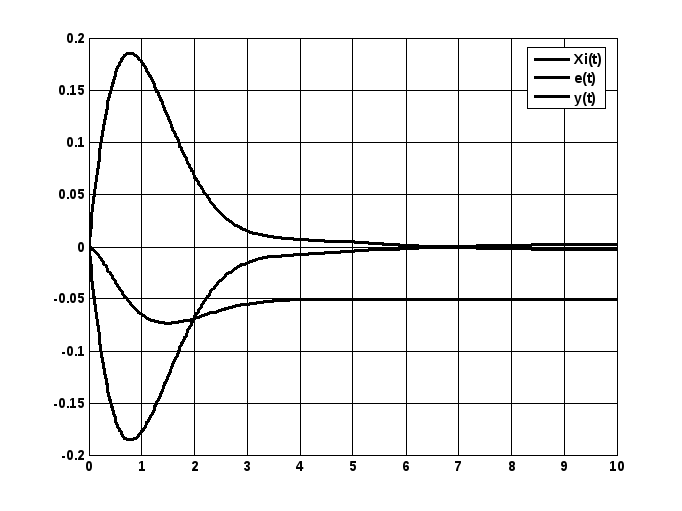 рафики
переходных процессов ε(t),
у(t),
хi(t)
на входе НЭ при ступенчатом воздействии
представлены на рисунке 3.4.1.
рафики
переходных процессов ε(t),
у(t),
хi(t)
на входе НЭ при ступенчатом воздействии
представлены на рисунке 3.4.1.
Рисунок 3.4.1
εmax= -0.185; ymax= 0.185; хimax= -0.073.
εуст= 0; yуст= 0; хiуст= -0.05.
Рассчитаем εуст.:
![]()
![]()
![]()
![]()
Графики переходных процессов ε(t), у(t), хi(t) на входе НЭ при линейно нарастающем воздействии представлены на рисунке 3.4.2.
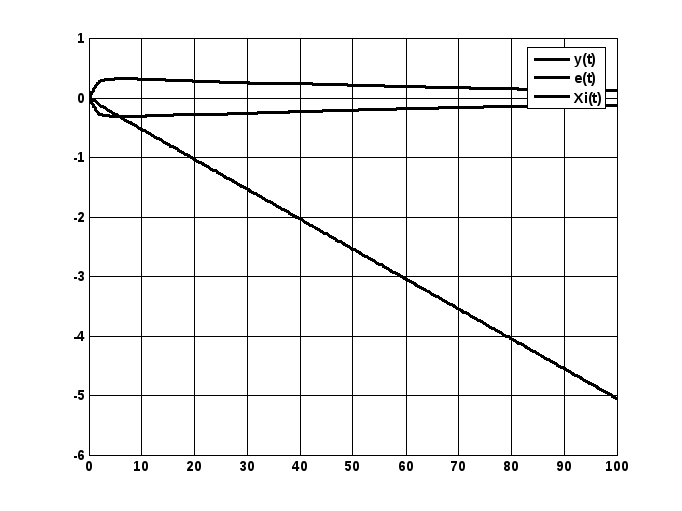
Рисунок 3.4.2
εmax= -0.31; ymax= 0.31; хimax= -∞.
εуст= 0; yуст= 0; хiуст=- ∞.
Рассчитаем εуст.:
![]()
![]()
![]()
![]()
4. Моделирование системы с учетом нелинейного элемента
Нелинейным элементом является заслонка. Она имеет следующие параметры:
зона нечувствительности Δ=0.05ximax =0.01375;
насыщение xiнас=0.5ximax=0.1375.
Н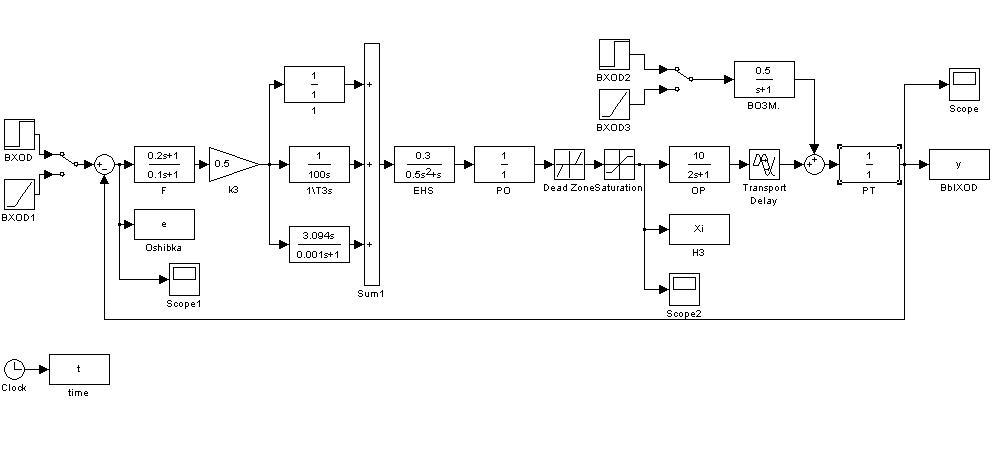 елинейная
модель системы представлена на рисунке
4.1
елинейная
модель системы представлена на рисунке
4.1
Рисунок 4.1
Г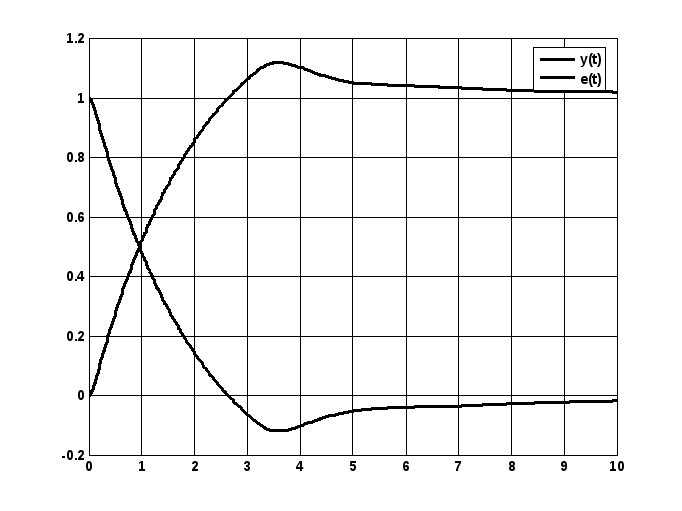 рафики
переходных процессовε(t)
и y(t)
при ступенчатом задающем воздействии
представлены на рисунке 4.2
рафики
переходных процессовε(t)
и y(t)
при ступенчатом задающем воздействии
представлены на рисунке 4.2
Рисунок 4.2
Полученная система имеет следующие показатели качества:
перерегулирование σ = 12 %;
время регулирования tр =5 с;
установившаяся ошибка εуст=0;
Г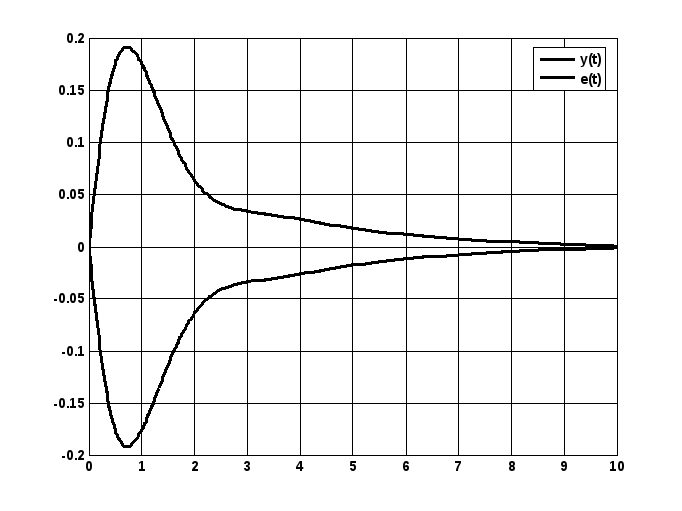 рафики
переходных процессовε(t)
и y(t)
при ступенчатом возмущающем воздействии
представлены на рисунке 4.3
рафики
переходных процессовε(t)
и y(t)
при ступенчатом возмущающем воздействии
представлены на рисунке 4.3
Рисунок 4.3
В нелинейной системе увеличилось время регулирования и перерегулирование, но в целом система осталась устойчива, и показатели качества остались приемлемыми.