

Пропорційний закон регулювання. Характеристика регуляторів.
Позиційні регулятори (Пз – регулятори)). Автоматичні регулятори, регулюючий орган яких може займати обмежене число певних положень, називаються позиційними. Вони відносяться до групи регуляторів перервної дії. Найчастіше застосовують двох- і трипозиційні регулятори.
Затвор регулюючого органу двохпозиційних регуляторів може займати тільки два положення — відкрите або закрите. Переміщення регулюючого органу з одного положення в інше відбувається досягнувши регульованої величиною заздалегідь встановленою (заданого) значення і здійснюється стрибкоподібно. Регулюючий орган трипозиційних регуляторів окрім двох крайніх має ще одне середнє положення, що сприяє плавнішій зміні керованої величини.
Прикладом двохпозиційного регулятора може служити дилатометричний термометр з контактною системою (рис. 1,а). Термометр складається з трубки 2, виготовленою з металу з великим коефіцієнтом лінійного розширення (мідь, латунь, алюміній, сталь) і стержня 3, виготовленого з матеріалу з малим коефіцієнтом лінійного розширення (кварц, фарфор, інвар). Стержень 3 спирається на пробку 1 в трубці 2, яка укручена в головку 5. У останній поміщений передавальний механізм важеля 6, 7, 8 і 12, забезпечений електричними контактами. Термометр за допомогою ніпеля 4 угвинчується в бобышку, укріплену в нагрівальній печі 14 (рис. 1,б).

Рисунок 1 - Двопозиційний дилатометричний регулятор температури (а) і принципова схема двопозиційного регулювання (б):
1 - пробка; 2 - трубка: 3 - стрижень; 4 - ніпель; 5 - головка; 6, 7, 8 - важелі з електричними контактами; 9 - шкала; 10 - стрілка; 11 - пружина; 12 - шарнір важеля 7; 13 - вільний кінець стержня 3; 14 - піч; 15 дилатометричний регулятор температури; 16 - контакти регулятора, що управляють (на важелях 7 і 8); 17 - котушки контактора; 18 - запобіжники; 19 - вимикач; 20 - контакту контактора; 21 - електронагрівач печі.
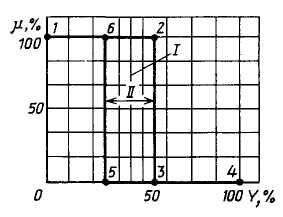
Рисунок 2 - Статична характеристика Пз - регулятора
І — задане значення ІІ — нейтральна зона.
При підвищенні температури трубка 2 подовжується більше, ніж стержень 3, тому вільний кінець 13 стержня 3 переміщається вниз. Разом з ним переміщаються вниз кінці важелів 6 і 7. Рух далі передається стрілці 10, яка вказує на шкалі 9 температуру в градусах.
При переміщенні важеля 7 вниз контакт між ним і важелем 8 контакту 16 на рис. 1,б розмикається. При цьому знеструмлюється котушка 17 контактора, що забезпечує розмикання контакту 20 і відключення нагрівача 21. При пониженні температури в печі трубка 2 коротшає, що викликає замикання контактів між важелями 7 і 8 і зрештою включення електронагрівача 21 печі 14 (рис. 1,б).
Установка заданого значення регульованої величини (температури) проводиться зміною жорсткості пружини 11.
У реальних двохпозиційних регуляторах зміна вихідного сигналу від мінімального до максимального значення і навпаки відбувається при різних значеннях вхідної величини, як це показано на рис. 2. Різниця між значеннями вхідної величини в моменти зміни вихідного сигналу називають зоною нечутливості регулятора. Мінімальна величина зони нечутливості залежить від зазорів і сил тертя, а також обумовлена необхідністю створення певних зусиль для розмикання електричних контактів.
З
рис. 2 видно, що при підвищенні температури
вихідна величина регулятора змінюється
по лінії, позначеній крапками 1, 2, 3 і 4.
Крапки 2 і 3 відповідають миттєвому
переміщенню контактів із закритого
положення у відкрите, тобто від
![]() = 100% до
= 0. При пониженні температури відбудеться
замикання електричних контактів важелів
7 і 8 (див. рис. 1), тобто вихідна величина
регулятора зміниться по лінії, позначеній
крапками 4, 5, 6 і 1. Крапки 5 і 6 відповідають
миттєвому переміщенню регулюючого
органу з відкритого положення в закрите.
Зона нечутливості регулятора визначається
в основному відстанню між контактами
важелів 7 і 8 (див. рис. 1). Зону нечутливості,
що настроюється, в промислових регуляторах
називають зоною повернення і позначають
через Ќ.
= 100% до
= 0. При пониженні температури відбудеться
замикання електричних контактів важелів
7 і 8 (див. рис. 1), тобто вихідна величина
регулятора зміниться по лінії, позначеній
крапками 4, 5, 6 і 1. Крапки 5 і 6 відповідають
миттєвому переміщенню регулюючого
органу з відкритого положення в закрите.
Зона нечутливості регулятора визначається
в основному відстанню між контактами
важелів 7 і 8 (див. рис. 1). Зону нечутливості,
що настроюється, в промислових регуляторах
називають зоною повернення і позначають
через Ќ.
Інтегральні регулятори (І - регулятори). Інтегральними називають такі регулятори, одному і тому ж значенню регульованої величини, яких можуть відповідати різні положення регулюючого органу.
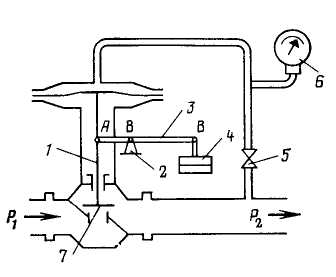
Рисунок 3 - Принципова схема І-регулятора прямої дії:
1 - шток, 2 - точка опори, 3 - важіль, 4 - грузнув, 5 - вентиль, 6 - манометр, 7 - затвор регулюючого органу.
На рис. 3 показана схема І-регулятора тиску прямої дії, призначеної для підтримки заданого значення тиску Р2 газу в трубопроводі. Вимірювальним пристроєм регулятора є мембранний механізм. Штоком 1 мембрану пов'язано із затвором 7 регулюючого органу. З штоком 1 жорстко зв'язаний також важіль 3, до якого прикріплений вантаж 4. Простір під мембраною сполучається з атмосферою.
Регулятор і система регулювання в цілому можуть знаходитися в рівноважному стані тільки за умови рівності моментів сил щодо точки опори 2. Один з цих моментів створюється силою тиск газу на мембрану, інший — вагою вантажу 4. Якщо момент сили тиску газу більше моменту сили, що створюється вантажем, то мембрана прогинається вниз, переміщаючи шток із затвором. Шток із затвором переміщатиметься вгору тільки в тому випадку, якщо момент сили, що створюється вантажем 4, буде більше моменту сили, створюваного тиском газу на мембрану.
Отже, змінюючи завдання (величину вантажу або співвідношення плечей важеля АВ), можна змінювати задане значення тиску Р2 (тиск в лінії витрати). Швидкість переміщення регулюючого органу при цьому пропорційна відхиленню регульованої величини від заданого значення, тому рівняння закону регулювання можна записати у вигляді:
![]() (1)
(1)
де S0 — настроювальний параметр регулятора.
Знак мінус в правій частині рівняння (1) означає, що при позитивному відхиленні регульованої величини від завдання регулюючий орган закриватиметься, а при негативному — відкриватися. Інтеграція рівняння (1) дає:

або
 (2)
(2)
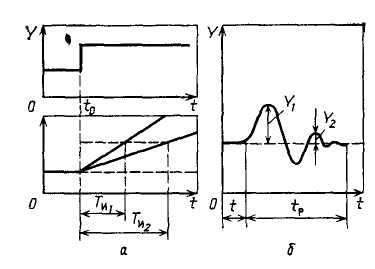
Рисунок 4 - Перехідні характеристики І-регулятора (а) і САР з І-регулятором (б).
Отже, зміни вихідної величини даного регулятора пропорційно інтегралу зміни вхідної величини. Залежність (2) визначає назва регулятора. Передавальна функція І-регулятора має вигляд:
![]() (3)
(3)
Інтегральним регулятором є інтегруюча ланка, час інтеграції якого можна змінювати в деяких межах, визначуваних конструкцією регулятора.
На рис. 4 показані характеристики І-регулятора. Інтегральні регулятори не мають статичної характеристики. З перехідної характеристики І-регулятора (рис. 4,а) видно, що регулюючий орган переміщається з постійною швидкістю. Причому чим менше час інтеграції, тим крутіше перехідна характеристика. На рис 4,б відображено типовий перехідний процес регулювання в САР з інтегральними регуляторами. Цей перехідний процес, як і всякий затухаючий коливальний процес, характеризується двома величинами: часом регулювання tр і ступенем загасання ψ. Остання рівна відношенню різниці двох сусідніх амплітуд одного знаку до першої з них:
![]() (4)
(4)
Оптимальне значення ψ для САР рівне 70 - 80%. Недоліком інтегральних регуляторів є відносно невисока швидкість регулювання. Вона тим менше, чим більше час інтеграції.
І-регулятори не можуть застосовуватися на об'єктах, що не володіють самовирівнюванням. Система, що складається з об'єкту без самовирівнювання і інтегрального регулятора, нестійка.
Пропорційні регулятори (П - регулятори). Пропорційними називають такі регулятори, відхилення регульованої величини яких від заданого значення викликає переміщення регулюючого органу на величину, пропорційну величині цього відхилення.
На рис. 5 показана схема пропорційного регулятора рівня прямої дії. Переміщення поплавця 4 через важіль 3 передається заслінці 2, встановленою в трубопроводі, по якому рідина поступає в ємність 1. При зменшенні витрати Qр рідини з апарату рівень підвищується, і поплавець переміщається вгору. Заслінка 2, переміщаючись при цьому вниз, зменшує притоку Qп рідини, що спричиняє за собою припинення зміни рівня. При пониженні ж рівня поплавець опускається вниз, приводячи до переміщення заслінки вгору і збільшенню притоки рідини. Рівень стабілізується.

Рисунок 5 - Пропорційний регулятор рівня прямої дії.
З рис. 5 видно, що в даному регуляторі переміщення заслінки пропорційне переміщенню поплавця. Ця пропорційність визначається співвідношенням плечей а і б важеля 3. Отже, простим пропорційним регулятором є підсилювальна ланка і описується рівнянням:
![]() (5)
(5)
де S1 — настроювальний параметр (коефіцієнт посилення) пропорційного регулятора.
Настроювальний параметр пропорційного регулятора часто представляють у вигляді величини д, зворотною коефіцієнту посилення і вираженою у відсотках, тобто:
![]() (6)
(6)
Наприклад,
якщо коефіцієнт посилення регулятора
рівний 20, то
![]() д
= 5%; якщо ж коефіцієнт посилення рівний
1, то
= 100%.
д
= 5%; якщо ж коефіцієнт посилення рівний
1, то
= 100%.
Величину називають межею пропорційності. Вона показує, якому відхиленню регульованої величини (у % від максимально можливою для даної САР) відповідає переміщення регулюючого органу з одного крайнього положення в інше.
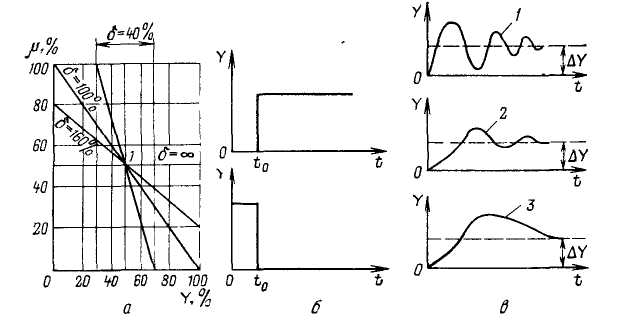
Рисунок 6 - Характеристики П-регулятора і системи регулювання:
а — статична; б — перехідна; у — перехідний процес САР.
На рис. 6 показані статичні характеристики пропорційного регулятора в координатах Y - , де Y — відносна зміна регульованої величини, — відносне переміщення регулюючого органу. З рис. 6 видно, що регулюючий орган починає переміщатися тільки досягши регульованої величиной нижньої межі пропорційності.
Наприклад, якщо регульована величина відповідає 50% шкалі регулятора, а межа пропорційності настроєна на 40% ( = 40%) і регулюючий орган займає середнє положення ( = 50% ходу), то при зростанні регульованої величини регулюючий орган почне переміщатися у бік закриття.
Перехідна характеристика П-регулятора аналогічна такій підсилювальної ланки (рис. 6,б). Передавальна функція П-регулятора має вигляд:
 (7)
(7)
На
характер перехідного процесу в СAP з
П-регулятором значно впливає межа
пропорційності регулятора (див. рис.
6). Із зменшенням
перехідний процес є таким, що коливає,
має малий коефіцієнт загасання і невелику
статичну помилку
![]() Y
(крива 1, рис. 6). При оптимальному для
даної САР межі пропорційності регулятора
перехідний процес затухає швидко, проте
статична помилка дещо більше (крива 2).
Якщо
дуже велика, то перехідний процес може
стати аперіодичним з великою статичною
помилкою (крива 3).
Y
(крива 1, рис. 6). При оптимальному для
даної САР межі пропорційності регулятора
перехідний процес затухає швидко, проте
статична помилка дещо більше (крива 2).
Якщо
дуже велика, то перехідний процес може
стати аперіодичним з великою статичною
помилкою (крива 3).
Настроювання регулятора (див. рис. 5) на необхідну величину проводиться зміною співвідношення плечей а і б важеля 3.
Пропорційні регулятори можуть застосовуватися для регулювання процесів, що протікають в об'єктах тих, що як володіють, так і не володіють самовирівнюванням.
Системам автоматичного регулювання з П-регуляторами властива наявність статичної помилки, тобто залишкового відхилення регульованої величини. Величина цього відхилення тим більше, чим більше зміна регульованої величини і чим більше межа пропорційності . Збільшуючи коефіцієнт посилення регулятора, можна зменшити статичну помилку регулювання, проте повністю усунути її не можна.
Пропорційно - інтегральні регулятори (ПІ - регулятори). Пропорційно-інтегральними називаються регулятори, зміна вихідної величини яких пропорційно як зміні вхідної величини, так і інтегралу її зміни:
 (8)
(8)
або
 (9)
(9)
Це рівняння зазвичай записують в такій формі:
 (9а)
(9а)
де 1/ = S1 е коефіцієнт посилення регулятора, а T = S/S0 — час інтеграції.
Ці дві величини S1 і Т, є настроювальними параметрами регулятора. З рівняння (9) видно, що ПІ-регулятор суміщає П-регулятор і І-регулятор.
Для поліпшення статичних властивостей ПІ-регулятори їх зворотний зв'язок здійснюється не по положенню регулюючого органу, як в П-регуляторах, а за швидкістю його переміщення, тобто використовується гнучкий зворотний зв'язок. Такий зв'язок працює тільки в перехідному режимі регулювання.
Таким чином, аналогічно І-регулятору ПІ-регулятор підтримує постійне значення регульованої величини незалежно від навантаження об'єкту, при відхиленні її від заданого значення в початковий момент часу перемістить регулюючий орган на величину, пропорційну величині відхилення (як П-регулятор), а потім продовжуватиме переміщення регулюючого органу до зникнення статичної помилки (за рахунок гнучкого зворотного зв'язку), тобто приведе регульовану величину до заданого значення.
Отже, в пропорційно-інтегральних регуляторах об'єднані переваги як пропорційних, так і інтегральних регуляторів. Негативні властивості перших регуляторів перекриваються позитивними властивостями других. На рис. 7 показана принципова схема ПІ-регулятора. Працює регулятор таким чином.
При порушенні рівноважного стану (наприклад, при стрибкоподібному зростанні регульованого тиску в трубопроводі) рухоме дно сильфону 1 і поршень 3 золотники 4 перемістяться вниз. Поршень 6 виконавчого механізму 7 підніматиметься вгору, збільшуючи відкриття регулюючого органу 5, і одночасно через шток 8, поршеньок 10 і циліндрик 9 переміщати вгору крапку 0, стискаючи пружину 12. Оскільки дросель 11 перешкоджає швидкому перетіканню масла з однієї камери циліндрика 9 в іншу, поршеньок 10 з циліндриком переміщатимуться вгору як одне ціле. Одночасно з підйомом крапки 0 важіль 2 обернеться за годинниковою стрілкою навколо крапки З і поверне поршень 3 золотники 4 в середнє положення. Регулюючий орган 5 і крапка 0 займуть нове положення, а регульований тиск в трубопроводі матиме інше, відмінне від первинного значення. Пружина 12 буде стисла з деяким запасом потенційної енергії, що виявляється у вигляді сили, прикладеної до крапки 0 і направленою зверху вниз. Таким чином, регулятор реалізує пропорційний закон регулювання. Але на цьому його дія не закінчується. Сила стиснення пружини, що діє на циліндрик 9, підвищує тиск масла в камері під поршеньком, і масло починає поволі перетікати через дросель 11 з верхньої камери в нижню, де тиск менший. При цьому поршеньок 10 залишається нерухомим, а циліндрик переміщається відносно поршенька вниз.
При русі поршенька і точки 0 вниз поршень золотника відкриє отвори, що сполучають золотник з виконавчим механізмом, і поршень останнього почне підніматися вгору. Він підніматиметься до тих пір, поки пружина 12 не витратить весь запас потенційної енергії, тобто поки крапка 0 і поршень золотника не повернуться в первинне положення, а це можливо тільки при первинному значенні регульованого тиску (при первинному положенні крапки З).
Отже, регульований тиск повернений до заданого значення, а регулюючий орган ПІ-регулятор відкритий більше, ніж у пропорційного регулятора.
Отже, дію регулятора можна розділити на пропорційну, ту, що протікає практично миттєво, і інтегральну, при якій регулюючий орган продовжує переміщатися в тому ж напрямі з швидкістю, залежною від ступеня відкриття дроселя.

Рисунок 7 - Пропорційно інтегральний регулятор.
Статична характеристика ПІ-регулятор показана на рис. 8, а. Нехай регулятор настроєний так, що при зміні регульованої величини Y від 20 до 80% шкали регулюючий орган переміщається з одного крайнього положення в інше ( = 60%), і хай система знаходиться в рівноважному стані при Y = 50% і = 50% (крапки 1 і 2). При зростанні регульованої величини до 60% (крапка 3) під впливом пропорційної частини регулятора регулюючий орган переміститься в крапку 4 (приблизно 68% свого ходу), а потім почне поволі діяти інтегральна частина, яка поверне регульовану величину до заданого значення (крапка 5), дія регулятора припиниться при новому положенні регулюючого органу (крапка 6), відповідному приблизно 73% повного ходу.
Оскільки в процесі роботи регулятора межа пропорційності не змінюється, можна зробити вивід про те, що інтегральна частина регулятора як би переміщає статичну характеристику паралельно самій собі (штрихова лінія).
Передавальна функція ПІ-регулятор має вигляд:
 (10)
(10)
Перехідна характеристика ПІ-регулятор показана на мал. 8, б. З перехідної характеристики видно, що реакція регулятора на стрибкоподібне зменшення регульованої величини має дві частини. У першій частині регулюючий орган різко переміщається до крапки а, в другій частині він переміщається з постійною швидкістю (лінія аb; діє інтегральна частина).
На рис. 8, в показані криві перехідних процесів САР з ПІ-регулятор при різних настройках регулятора д і Т1: при дуже малому значенні д або дуже малому значенні Т1 — крива 1; крива 2 зображає перехідний процес при оптимальних настройках регулятора; крива 3 відповідає перехідному процесу при дуже великому значенні або дуже великому значенні часу інтеграції.

Рисунок 8 - Характеристики ПІ-регулятор і система регулювання:
а - статична; б — перехідна; у — перехідні процеси САР з ПІ-регулятор.
З порівняння якості регулювання САР при використанні І-регулятора і ПІ-регулятор (криві 4 і 5 відповідно) видно, що воно краще при використанні ПІ-регулятор.
Регулятори з попередженням. Регулятори з попередженням бувають двох видів: ПД - пропорційно -дифференциальные і ПІД – пропорційно - інтегрально-диференціальні.
ПД-регулятором (пропорційним регулятором з передуванням) називають такий регулятор, регулююча дія якого пропорційно відхиленню регульованої величини і швидкості цього відхилення. Оскільки швидкість зміни вхідної величини є її похідній і характеризує тенденцію її зміни, дію регулятора, пропорційну похідною, як би передує значним відхиленням регульованої величини.
Регулюючий орган регуляторів з передуванням переміщається з деяким випередженням, пропорційним швидкості зміни регульованої величини. Із зменшенням швидкості зміни випереджаюча дія регулятора також зменшується і повністю припиняється в рівноважному стані. Регулююча дія пропорційного регулятора з передуванням має вигляд:
 (11)
(11)
або
 (12)
(12)
де Tп — час передування.
Вихідна величина є сумою пропорційної дії і дії по похідній. ПД-регулятор має два настроювальні параметри: межа пропорційності і час передування.
Перехідна характеристика пропорційного регулятора з передуванням показана на рис. 9. Вона відрізняється від перехідної характеристики П-регулятора різким збільшенням вихідної величини м в початковий період стрибкоподібної зміни регульованої величини Y. Потім з часом значення вихідної величини зменшується і до моменту t2 досягає постійного значення, відповідного настройці межі пропорційності. Таким чином, дію передування можна фізично представити як тимчасове збільшення коефіцієнта посилення регулятора.
Тимчасове збільшення коефіцієнта посилення називається прямим передуванням і застосовується в регуляторах, що встановлюються на інерційних об'єктах з великим запізнюванням. На об'єктах з малим запізненням, що характеризуються частими і швидкими змінами навантаження, застосовують ПД-регулятори із зворотним передуванням.
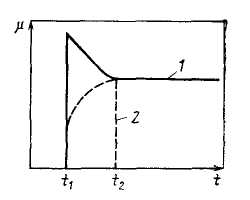
Рисунок 9 - Перехідні характеристики ПД-регулятора:
1 — з прямим передуванням; 2 — із зворотним передуванням.
Дія зворотного передування зводиться до тимчасового зменшення коефіцієнта посилення регулятора. Перехідна характеристика ПД-регулятора із зворотним передуванням показана на рис. 10.9 штриховою лінією.
ПІД-регуляторами пропорційно-інтегрально-диференціальними (ПІ-регулятор з передуванням) 5 називаються такі, регулююча дія яких пропорційно відхиленню регульованої величини, інтегралу і швидкості цього відхилення. Рівняння цих регуляторів має вигляд:
 (13)
(13)
або
 (14)
(14)
ПІД-регулятори мають пристрою для зміни трьох настроювальних параметрів 1/ , Тн і Тп.
Слід мати на увазі, що зміна однієї настройки регуляторів деяких конструкцій спричиняє за собою зміну інших настройок.
На рис. 10 показана перехідна характеристика ПІД-регулятора з прямим передуванням. Частина характеристики на відрізку часу від t1 до t2 указує на переважання пропорційною і диференціальною складових, а з моменту t2 ділянка характеристики, представлена прямою лінією, є сумою пропорційною і інтегральною складових.
Пристрої передування, що створюють дію по похідній, різні за принципом дії і по місцю розташування серед інших елементів систем автоматичного регулювання. Вони можуть знаходитися як у вимірювальній, так і в регулюючій частинах системи.
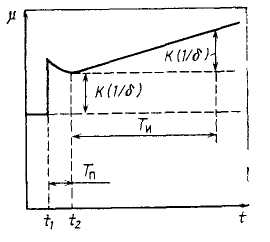
Рисунок 10. - Перехідна характеристика ПІД-регулятора з прямим передуванням.