

Управление и оптимизация / Novikov - Refleksiya i upravleniye 2013
.pdfЕсли при любых предпочтениях агентов r Î Ân сообщение ими достоверной информации является равновесием Нэша,
(2) " i N " r Î Ân " s Î Â1 fi(hi(r), ri) ³ fi(hi(r-i, s), ri),
то такой механизм называется неманипулируемым механизмом. Данное свойство далее будем называть неманипулируемостью.
Казалось бы, более сильным, чем (2), является требование того,
чтобы сообщение каждым агентом достоверной информации было его доминантной стратегией:
(3) " i Î N " ri, si Î 1 " s-i Î Ân-1 fi(hi(s-i, ri), ri) ³ fi(hi(s-i, si), ri).
Однако легко видеть, что определения (2) и (3) эквивалентны [207]. Это означает, что, так как в определениях (2) и (3) неманипу- лируемости механизмов планирования вектор r Î Ân типов агентов является «параметром», то неманипулируемость можно интерпрети- ровать следующим образом: механизм является неманипулируемым, если, каковы бы ни были истинные типы агентов, сообщение досто-
верной информации является доминантной стратегией каждого из них.
Рефлексивная неманипулируемость. Откажемся от предпо-
ложения о том, что вектор типов агентов является общим знанием, и
обобщим на этот случай задачу о неманипулируемости механизма планирования [122]. Пусть информированность i-го агента описыва- ется деревом Ii c элементами вида riσ Î Â1, σ Î S, причем ri – истин- ный тип i-го агента – достоверно ему известен, i Î N.
В этом случае агенты играют в рефлексивную игру, информаци- онное равновесие которой в данном случае определяется следующи- ми условиями (см. раздел 2.3):
1)структура информированности I имеет конечную сложность;
2)λ, μ Σ Iλi = Iμi Þ xλi* = xμi*;
3)" i Î N, " σ Î S
(4) s* |
Arg max |
f |
(h (s* |
,..., s* |
, s |
, s* |
,..., s* |
), r |
) . |
|
σi |
si 1 |
i |
i |
σi1 |
σi,i −1 |
i |
σi,i +1 |
σin |
σi |
|
В соответствии с (4) равновесное сообщение i-го агента (реаль- ного) зависит от структуры его информированности Ii, то есть
(5) si* = si* (Ii), i Î N.
161
Вчастном случае – если имеет место общее знание – выражение
(4)совпадает с определением равновесия Нэша.
Обозначим s*(I) = ( s1* (I1), s2* (I2), …,
маемое в соответствии с механизмом структуры информированности I:
sn* (In)). Решение x, прини- h(×), будет зависеть от всей
(6) x = h(s*(I)).
Обсудим теперь, что следует понимать под манипулируемостью в случае отсутствия общего знания.
Напомним, что в соответствии с (2) и (3) в условиях общего знания механизм является неманипулируемым, если, каковы бы ни были истинные типы агентов, сообщение достоверной информации является доминантной стратегией каждого агента.
Попробуем обобщить это определение на случай информацион- ного равновесия – потребуем, чтобы какова бы ни была структура информированности реального агента, сообщение достоверной
информации являлось бы для него компонентой информационного равновесия (4):
(7) r n, i N, Ii
ri Arg max |
f |
|
(h |
(s* |
(I |
|
),..., s* |
(I |
|
), s |
, s* |
(I |
|
),..., s* |
(I |
|
)), r ) . |
si 1 |
|
i |
i |
i1 |
|
i |
i,i−1 |
|
i |
i |
i,i+1 |
|
i |
in |
|
i |
i |
Легко видеть, что, если выполнено (3) (механизм является не- манипулируемым), то имеет место и (7). В другую сторону: так как
множество всевозможных структур информированности включает и структуру, соответствующую общему знанию, то, если выполнено (7), то механизм является неманипулируемым (должно иметь место (3)). Получили, что определения (3) и (7) эквивалентны.
Итак, можно сделать следующий качественный вывод: если в
рассматриваемом механизме у каждого агента при любом его типе существует доминантная стратегия (а это – очень сильное требова- ние, и класс удовлетворяющих ему механизмов чрезвычайно узок), то принимаемые им решения не зависят от структуры информиро- ванности.
Ослабления требования неманипулируемости можно добиться, введя определение рефлексивной неманипулируемости – существо- вания подструктур информированности riσ 1, i N, s Σ+, та-
162
ких, что при любых типах реальных агентов сообщение ими досто- верной информации является информационным равновесием.
Формально: будем называть механизм h(×) рефлексивно немани-
пулируемым, если существуют подструктуры информированности riσ Î Â1, s Î S+ , реальных агентов (i Î N), такие, что, каков бы ни был тип реального агента, сообщение достоверной информации является для него компонентой информационного равновесия:
(9) |
" i Î N " ri Î Â1 |
|
|
|
|
|
|
|
|
ri Î Arg max f |
(h (s* |
,..., s* |
, s |
, s* |
,..., s* |
), r ) , |
|
|
si 1 |
i |
i i1 |
i,i −1 |
i |
i,i +1 |
in |
i |
(10) |
" s Î S " j Î N |
|
|
|
|
|
|
|
s* |
Arg max f |
|
(h |
(s* |
,..., s* |
, s |
|
, s* |
,..., s* |
), r |
) . |
iσj |
s j 1 |
j |
j |
iσj1 |
iσj, j−1 |
|
j |
iσj, j+1 |
iσjn |
iσj |
|
Понятно, что множество рефлексивно неманипулируемых меха- низмов не уже множества неманипулируемых механизмов (любой неманипулируемый механизм является рефлексивно неманипули- руемым), поэтому их характеризация (в том числе – поиск соответ- ствующих подструктур информированности) является актуальной задачей.
Обозначим EI – множество всевозможных (при всех допустимых структурах информированности) равновесных наборов действий реальных агентов, E-i = Proj-i EI, i Î N. Определение (9)–(10) можно сформулировать в следующем виде: механизм является рефлексивно неманипулируемым, если для i-го агента существует обстановка ~r−i Î E-i, такая, что:
~ |
Î Â |
1 |
~ |
~ |
, |
~ |
), ri), i Î N. |
(11) " ri, ri |
|
fi(hi( r−i |
, ri), ri) ³ fi(hi( r−i |
ri |
Обозначим множество равновесий Нэша
(12)EN = {r Î Ân |" i Î N " ~ri Î Â1 fi(hi(r), ri) ³ fi(hi(r-i, ~ri ), ri)},
(13)X i0 = Proji EN, i Î N.
Далее до конца данного раздела будем предполагать, что струк- тура информированности агентов является конечной регулярной.
Справедливо следующее утверждение – достаточное условие рефлексивной неманипулируемости (необходимым условием явля-
ется (11)).
163
Утверждение 2.16.1. Для того чтобы механизм планирования являлся рефлексивно неманипулируемым, достаточно, чтобы для любого i-го агента, i N, существовал набор типов
…, ~rn ) EN такой, что выполнено (11). При этом для построения
рефлексивно неманипулируемых механизмов достаточно ограни- читься рассмотрением агентов с не более чем вторым рангом реф- лексии.
Доказательство. Достаточно сформировать структуру информи- рованности i-го агента Ii (отметим, что структуры информированно- сти различных агентов можно строить независимо) такую, что:
(14) rijσk = ~rk , j ¹ i, для любого s Σ.
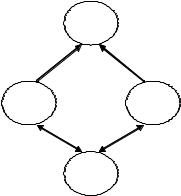
Это означает, что с точки зрения i-го агента все остальные счи- тают, что имеет место общее знание (см. Рис. 42).
Легко видеть, что с точки зрения i-го агента сообщение досто-
верной информации является равновесием игры его фантомных агентов, следовательно, выполнено (10), что с учетом (11) приводит к выполнению (9). ∙
i
ij  ik
ik
iji
Рис. 42. Граф рефлексивной игры с точки зрения i-го агента
Содержательно, представления i-го агента о типах оппонентов и их представлениях должны быть следующими. Агент должен быть, во-первых, уверен, что типы оппонентов таковы, что выполнено условие (11), обеспечивающее выгодность сообщения ими достовер- ной информации. Во-вторых, представления оппонентов с точки
164

зрения рассматриваемого агента должны быть таковы, что сообще- ние именно данной информации является равновесием их игры (см. условие (10)). Для этого достаточно, чтобы на нижнем уровне струк-
туры информированности имело место субъективное общее знание фантомных агентов.
Отметим конструктивность приведенного доказательства – оно содержит алгоритм построения конкретной структуры информиро- ванности (14), обеспечивающей рефлексивную неманипулируе- мость.
Приведем пример механизма планирования, который является манипулируемым, но при этом рефлексивно неманипулируемым.
Пример 2.16.1. Пусть имеются два агента с неотрицательными типами r1 и r2. (Напомним, что типом агента в данном случае являет- ся оптимальный для него план.) Рассмотрим механизм, который в зависимости от сообщений агентов s1 и s2 назначает им планы x1 и x2 соответственно по следующим формулам:
(15) x1 = s1 – s2 / 2, x2 = s2 – s1 / 2, s1, s2 ³ 0.
Решая систему уравнений
ìïs1 - s22 = r1,
í
ïïs2 - s1 = r2 , î 2
получаем равновесные по Нэшу стратегии (заявки) агентов:
s* (r1, r2) = |
2 |
(2 r1 + r2), |
s* (r1, r2) = |
2 |
(2 r2 + r1). |
|
|
||||
1 |
3 |
|
2 |
3 |
|
|
|
|
|
Легко видеть, что механизм (15) является манипулируемым – при любых типах агентов, не равных одновременно нулю, по край- ней мере один из агентов сообщает заявку, не совпадающую с его типом. Однако при r1, r2 ³ 0 механизм является рефлексивно нема- нипулируемым. Действительно, достаточно убедить каждого агента в том, что с точки зрения его оппонента общим знанием является равенство нулю обоих типов. Иными словами, достаточно сформи- ровать структуру информированности riσ= 0, i =1, 2, σ Î S+ . Тогда
единственным информационным равновесием является набор si* = ri, si*σ = 0, i =1, 2, σ Î S+ .
Таким образом, в равновесии оба агента сообщают свои истин- ные типы.
165
В то же время, при r1, r2 > 0 механизм (15) не является рефлек- сивно неманипулируемым, так как какова бы ни была структура информированности (и, в частности, какова бы ни была ее глубина), каждый из агентов будет уверен в том, что сообщение оппонента будет отлично от нуля. ∙
Ряд прикладных механизмов планирования исследован (с точки
зрения стабильности взаимных представлений агентов о типах друг друга, при которых механизм обладает теми же свойствами) в [7, 32, 33, 85, 116 и др.].
166
ГЛАВА 3. СТРАТЕГИЧЕСКАЯ РЕФЛЕКСИЯ
ИУПРАВЛЕНИЕ
Внастоящей главе исследуются модели стратегической рефлек- сии. В разделе 3.1 рассматривается модель стратегической рефлек- сии в игре двух лиц, что в разделе 3.2 позволяет решить задачу о
максимальном целесообразном ранге стратегической рефлексии в
биматричных играх, а также определить и изучить т.н. игры рангов. Раздел 3.3 посвящен обсуждению конечности ранга рефлексии, порождаемой ограниченностью способностей человека по перера- ботке информации. Раздел 3.4 – описанию метода рефлексивных разбиений, используемого для решения задач рефлексивного управ-
ления.
3.1. СТРАТЕГИЧЕСКАЯ РЕФЛЕКСИЯ В ИГРАХ ДВУХ ЛИЦ
Рассмотрим последовательно, в порядке возрастания информи- рованности, рефлексивные модели принятия решений в играх двух лиц.
Нулевой ранг рефлексии. Проанализируем задачу принятия агентом решения в случае полного отсутствия информации о со- стоянии природы (напомним, что предположение о том, что целевые функции и допустимые множества являются общим знанием, счита- ется выполненным). Представляется разумным, с одной стороны, принцип принятия решений на основе максимального гарантирован- ного результата, в соответствии с которым i-ый агент выберет гаран- тирующую (по состоянию природы и действию оппонента) страте-
гию
(1) |
1 |
xг |
= arg max min |
min fi(θ, xi, x-i). |
|
i |
xi X i θ Θ |
x−i X −i |
|
|
|
|
С другой стороны, гипотетически принцип (1) принятия реше- ний не является единственно возможным – агент может рассчиты- вать, что его оппонент выберет не наихудшее действие, а собствен- ную гарантирующую стратегию (отметим, что каждый агент может вычислить гарантирующую стратегию оппонента). Тогда наилуч-
шим ответом будет
(2) |
2 |
xг |
= arg max min fi(θ, xi, |
1 |
xг |
). |
|
i |
xi X i θ Θ |
−i |
|
||
|
|
|
|
|
|

Но аналогичным образом может рассуждать оппонент рассмат- риваемого агента. Если рассматриваемый агент допускает такую возможность, тогда его гарантирующей стратегией будет
(3) |
3 |
xг |
= arg max min fi(θ, xi, |
2 |
xг |
), |
|
i |
xi X i θ Θ |
−i |
|
||
|
|
|
|
|
|
где 2 x−гi вычисляется в соответствии с (2) заменой индекса «i» на «-
i» и наоборот. Цепочку наращивания «ранга рефлексии» (предполо- жений агента о ранге рефлексии оппонента) можно продолжать и далее (см. аналогии в динамических моделях, рассматриваемых в [126]), определив рекуррентно
(4) |
k |
xг |
= arg max min fi(θ, xi, |
k −1 |
xг |
), k = 2, 3, ..., |
|
i |
xi X i θ Θ |
−i |
|
||
|
|
|
|
|
|
где 1 xiг , i = 1, 2, определяются (1). Набор действий типа (4) будем
называть множеством рефлексивных гарантирующих стратегий.
Рассмотрим иллюстративный пример.
Пример 3.1.1. Пусть целевые функции агентов имеют вид: f1(x1, x2) = x1 – x12 /2x2, f2(x1, x2) = x2 – x22 /2(x1 + δ),
где δ > 0. Относительно допустимых множеств предположим, что X1 = X2 = [ε; 1], 0 < ε < 1. Будем считать, что каждая из констант ε и δ много меньше единицы. Гарантирующие стратегии агентов приве- дены в Табл. 4.
Видно, что, во-первых, значения гарантирующих действий уве- личиваются с ростом «ранга рефлексии». Во-вторых, различным «рангам рефлексии» агентов соответствуют в общем случае различ- ные гарантирующие действия (отметим, что равновесием34 Нэша в данном примере является вектор (1; 1)). ∙
Табл. 4. Гарантирующие стратегии агентов в примере 3.1.1
k |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
... |
k x1г |
ε |
ε + δ |
ε + δ |
ε + 2δ |
ε + 2δ |
ε + 3δ |
ε + 3δ |
... |
k x2г |
ε + δ |
ε + δ |
ε + 2δ |
ε + 2δ |
ε + 3δ |
ε + 3δ |
ε + 4δ |
... |
34 В качестве отступления заметим, что, если в рассматриваемом примере целевая функция второго агента имеет вид f2(x1, x2) = x2 + x22 /2x1, то у него существует доминантная стратегия (равная единице), и последовательность гарантирующих стратегий первого агента стабилизируется уже на втором члене: 1 xiг = ε, 2 xiг = 1/2. Если первый агент может вычислить доминантную стратегию своего оппонента, то представляется рациональным выбор им действия 2 xiг .
168

Вопрос о том, какое действие следует выбирать агенту, остается открытым. Единственно, можно констатировать, что, обладая ин-
формацией только о множестве возможных значений состояния природы, i-ый агент может выбирать одно из действий k xiг , i = 1, 2;
k = 1, 2, ..., определяемых выражениями (1)-(4).
Доопределить рациональный выбор агента в рассматриваемой модели можно следующим образом. Если агенту неизвестна целевая функция оппонента (что исключено в рамках предположения о том,
что целевые функции и допустимые множества являются общим знанием), то единственным его рациональным действием является выбор (1), то есть классический МГР. В рамках введенных предпо- ложений агенту известна целевая функция оппонента, а также из- вестно, что оппоненту известен этот факт и т.д. Поэтому с точки зрения агента нерационально использование классического МГР, и ему следует рассчитывать, как минимум, что оппонент будет ис-
пользовать МГР, что приведет к выбору 2 xiг . Но, опять же, в силу
того, что целевые функции являются общим знанием, агент может предположить, что такой ход его рассуждений может быть восста-
новлен оппонентом, что сделает целесообразным выбор 3 xiг и т.д. до
бесконечности. Следовательно, с точки зрения агента остается неоп- ределенность относительно «ранга рефлексии» оппонента35. Относи- тельно этого параметра он не имеет никакой информации (если у агента имеются некоторые убеждения по этому поводу, то может реализоваться соответствующее субъективное равновесие), что
делает рациональным использование гарантированного результата по «рангу рефлексии» оппонента:
(5) x’i = arg max |
min |
min fi(θ, xi, |
j x−гi ). |
xi X i |
j =1,2,... |
θ Θ |
|
35 Другими словами, исходная игра может быть заменена на игру, в которой агенты выбирают ранги своей рефлексии. Для новой игры могут быть также построены рефлексивные аналоги и т.д. до бесконечности (см. примеры: «Пенальти» – во введении, «Игра в прятки» и «Снос на мизере» – в разделе 3.2). Одним из возмож- ных способов борьбы с подобной «бесконечностью» является использование гарантированного результата по рангу рефлексии оппонента. Другим возможным способом, эффективным для конечных игр, является определение максимального целесообразного ранга рефлексии агентов – см. раздел 3.2.
169

Отметим, что, во-первых, x’i может отличаться от классической гарантирующей стратегии 1 xiг , определяемой выражением (1). Во-
вторых, при использовании стратегии (5) факт наличия доминантной стратегии оппонента будет учтен агентом (см. сноску в примере
3.1.1).
ВТабл. 5 приведены значения целевой функции первого агента
впримере 3.1.1 в зависимости от «ранга рефлексии» оппонента и соответствующие действия оппонента. Видно, что при использова-
нии стратегии (5) выигрыш i-го агента равен ε + δ, что превышает выигрыш ε, получаемый при использовании классического МГР.
Табл. 5. Выигрыши первого агента в примере 3.1.1
j |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
2 f1(BR1( j x2г ), j x2г ) |
ε + δ |
ε + δ |
ε + 2δ |
ε + 2δ |
ε + 3δ |
ε + 3δ |
ε + 4δ |
j x2г |
ε + δ |
ε + δ |
ε + 2δ |
ε + 2δ |
ε + 3δ |
ε + 3δ |
ε + 4δ |
Таким образом, рациональным в рассматриваемой модели мож- но считать использование агентом стратегии (4) или (5).
Первый ранг рефлексии. Предположим теперь, что агент об- ладает определенной информацией о состоянии природы, которую считает истинной, и больше ему ничего достоверно не известно.
В рамках существующей неопределенности в силу принципа де- терминизма у агента, осуществляющего стратегическую рефлексию, имеются две альтернативы – либо предположить, что его оппонент не обладает никакой информацией, либо считать, что последний обладает той же информацией, что и он сам36.
Если агент не вводит никаких предположений об информиро- ванности и принципах поведения оппонента, то он вынужден при- менять принцип максимального гарантированного результата (МГР)
– никакой дополнительной (по сравнению с рассмотренной выше моделью нулевого ранга рефлексии) информации об оппоненте у
36 Данный принцип (и его обобщения) будет широко использоваться ниже при определении конечных информационных структур – действительно, обладая ин- формацией Ii, i-ый агент может в случае неопределенности приписывать другим агентам только информированность, согласованную с Ii.
170