

8. Устройства ввода-вывода
Память не является единственным ресурсом, которым должна управлять операционная система. Устройства ввода-вывода также тесно взаимодействуют с операционной системой. Как видно из рис. 1.5, устройства ввода-вывода обычно состоят из двух частей: контроллера и самого устройства. Контроллер — это микросхема или набор микросхем на вставляемой в разъем плате, физически управляющая устройством. Он принимает команды операционной системы, например указание прочитать данные с устройства, и выполняет их.
Во
многих случаях фактическое управление
устройством очень сложно и требует
высокого уровня детализации, поэтому
в работу контроллера входит представление
простого интерфейса для операционной
системы. Для осуществления этого
контроллеры часто содержат маленькие
встроенные компьютеры, запрограммированные
на выполнение подобных задач.
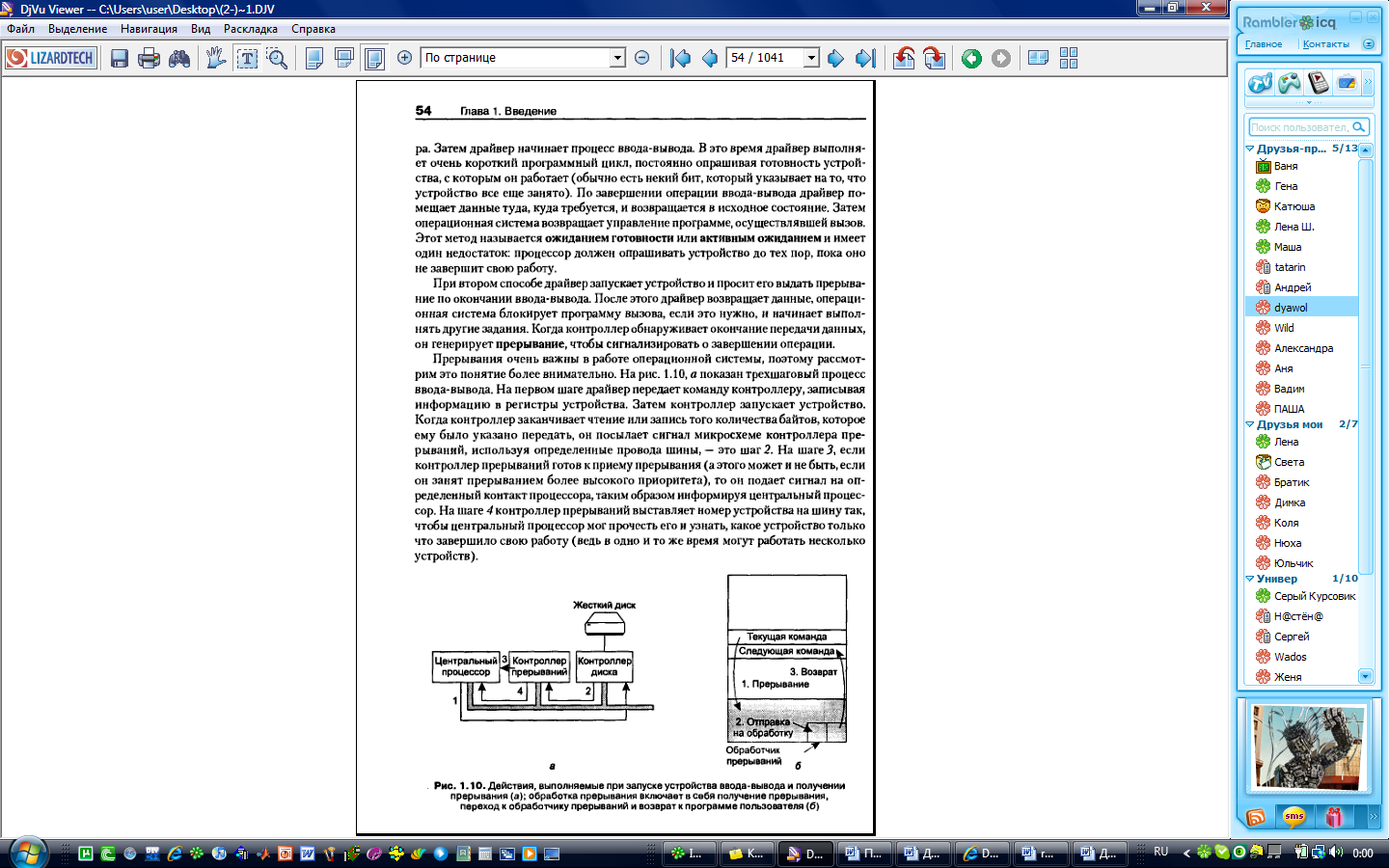
Действия, выполняемые при запуске устройства ввода-вывода и получении прерывания (а); обработка прерывания включает в себя получение прерывания, переход к обработчику прерываний и возврат к программе пользователя (б)
Следующей частью является само устройство. Устройства имеют достаточно простые интерфейсы, во-первых, потому что их возможности весьма невелики и, во-вторых, потому что нужно привести их к единому стандарту. Единый стандарт необходим, чтобы любой IDE-контроллер диска мог управлять любым IDE-диском. Аббревиатура IDE образована от Integrated Drive Electronics (встроенный интерфейс накопителей). IDE-интерфейс является стандартным для дисков на компьютерах с процессором Pentium, а также некоторых других компьютерах. Поскольку настоящий интерфейс устройства скрыт с помощью контроллера, операционная система видит только интерфейс контроллера, который может сильно отличаться от интерфейса самого устройства.
Так как все типы контроллеров отличаются друг от друга, для управления ими требуется различное программное обеспечение. Программа, которая общается с контроллером, отдает ему команды и получает ответы, называется драйвером устройства. Каждый производитель контроллеров должен поставлять драйверы для поддерживаемых им операционных систем. Теоретически драйверы могут работать вне ядра, но такую возможность поддерживают всего несколько существующих систем, так как для этого требуется, чтобы драйвер в пространстве пользователя имел доступ к устройству неким контролируемым способом — очень редко поддерживаемое свойство. Есть три способа установки драйвера в ядро. Первый заключается в том, чтобы заново скомпоновать ядро вместе с новым драйвером и затем перезагрузить систему. Так работает множество систем UNIX. Второй: создать запись во входящем в операционную систему файле, говорящую о том, что требуется драйвер, и затем перезагрузить систему. Во время начальной загрузки операционная система сама находит нужные драйверы и загружает их. Так работает система Windows. При третьем способе операционная система может принимать новые драйверы, не прерывая работы, и оперативно устанавливать их, не нуждаясь при этом в перезагрузке. Этот способ редко используется, но сейчас он становится все более и более распространенным. Такие съемные устройства, как шины USB и IEEE 1394 (мы поговорим о них ниже), всегда нуждаются в динамически загружаемых драйверах.
Для связи с каждым контроллером существует небольшое количество регистров. Например, минимальный контроллер диска может иметь регистры для определения адреса на диске, адреса в памяти, номер сектора и направления операции (чтение или запись). Чтобы активизировать контроллер, драйвер получает команду от операционной системы, затем транслирует ее в величины, подходящие для записи в регистры устройства.
На некоторых компьютерах регистры устройств отображаются в адресное пространство операционной системы, поэтому их можно читать или записывать как обычные слова в памяти. На таких машинах не нужны специальные команды ввода-вывода, а программы пользователей можно оградить от аппаратуры, помещая эти адреса в памяти за пределами досягаемости программ (например, с помощью базового и предельного регистров). На других компьютерах регистры устройств располагаются в специальных портах ввода-вывода, и каждый регистр имеет свой адрес порта. На этих машинах в режиме работы ядра доступны команды IN и OUT, они позволяют драйверам считывать и записывать регистры. Первая схема устраняет необходимость специальных команд ввода-вывода, но использует некоторое количество адресного пространства. Вторая схема не затрагивает адресное пространство, но требует наличие специальных команд. Обе схемы широко используются.
+ вопрос №14 о способах ввода-вывода