


Аннотация:
Курсовая работа состоит из двух разделов.
В первом разделе приведен кинематический и динамический анализ механизма, выбран электродвигатель и определены размеры маховика. Во втором разделе сделан синтез зубчатой передачи и построена кинематическая схема редуктора. Графическая часть работы состоит из двух листов формата А1.
 Введение
Введение
Гайковырубной автомат предназначается для штамповки гаек. Высадочный механизм является кривошипно-коромысловым. Благодаря своей конструкции рабочие скорости ползуна в конце хода малы, жесткость механизма автомата увеличивается. Коленчатый вал высадочного механизма приводится в движение от электродвигателя при помощи планетарного редуктора и зубчатой передачи. Маховик размещен на валу основного механизма. Высадочный ползун с закрепленным на нем пуансоном, совершая по горизонтали возвратно-поступательное движение, осуществляет деформацию заготовки.
Наиболее широко применяются следующие технологические процессы штамповки шестигранный гаек: четырехпереходный процесс, пятипереходный процесс, трехпереходный процесс. Все эти процессы предусматривают: осадку заготовки с формообразованием фаски с одной стороны, окончательное оформление шестигранника с фасками с двух сторон, выдавливание полостей с двух сторон с фасками; прошивку отверстия.
Применяют проволоку из низко- и среднеуглеродистой стали.
Динамическое исследование механизма
Структурный анализ исполнительного механизма
 В
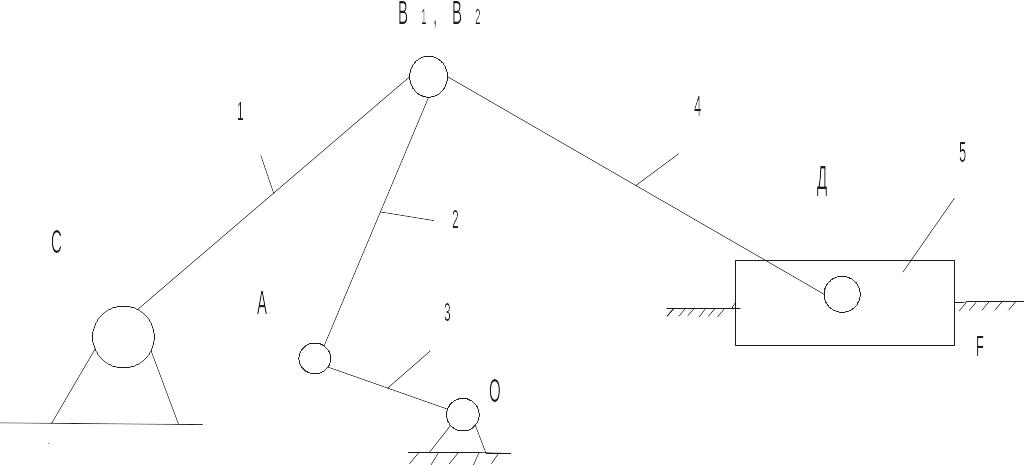
плоской структурной схеме механизма
(рис. 1) обозначаем цифрами 0, 1, 2, 3, 4, 5
стойку и подвижные звенья, число которых
n=5,
а буквами - кинематические пары. В плоской
схеме все пары являются плоскими
одноподвижными. Число этих пар p1
n=7
(в шарнире «В» две кинематисекие пары:
В1 и В2)
В
плоской структурной схеме механизма
(рис. 1) обозначаем цифрами 0, 1, 2, 3, 4, 5
стойку и подвижные звенья, число которых
n=5,
а буквами - кинематические пары. В плоской
схеме все пары являются плоскими
одноподвижными. Число этих пар p1
n=7
(в шарнире «В» две кинематисекие пары:
В1 и В2)
Назначим в качестве начального звено 3 (обозначено стрелкой на схеме) и расчленим кинематическую цепь на структурные группы и первичный механизм (рис. 2)
Ф
Рис. 1 Плоская структурная система
механизма
 М=I1(0,3)+II1(1,2)+II2(4,5)
М=I1(0,3)+II1(1,2)+II2(4,5)
В
Рис. 2 Составные части механизма
Избыточные связи qi=0, т.к. в механизме отсутствуют кинематически пассивные звенья.
Проверим решение по структурной формуле
W-qi = 3n- 2p1n - p2n= 3.5- 2.7 =1; i=1 (выполняется)
Число замкнутых контуров по формуле Гохмана
K= p∑ - n = 7- 5 =2
Число избыточных связей в изображенной схеме механизма:
q=W-6n+5p1=1-6.5+5.7=6 (проверка: каждый замкнутый контур с одноподвижными парами имеет q=3, т. к. контуров k=2, то q=6, что подтверждает решение)
1.2 Синтез самоустанавливающегося механизма
Используем принцип наслоения структурных групп, используя пространственные структурные группы без избыточных связей.
В
Рис. 3 Схема самоустанавливающегося
механизма
Проверим решение по структурной формуле, учитывая, что число подвижных звеньев n=5, число одноподвижных пар p1=3, число двухподвижных пар p2=2, число трехподвижных пар p3=2, число четырех и пятиподвижных пар p4 и p5=0, число степеней свободы W=1.
W-q= 6n - 5p1 - 4p2 - 3p3= 6.5 - 5.3 - 4.2 - 3.2=1 → q=0
1.3 Синтез кинематической системы механизма
Механизм можно рассматривать как последовательное соединение кривошипно-коромыслового 0-1-2-3 и коромыслово- ползунного (1-4-5-0) механизмов.
Рассмотрим кривошипно-коромысловый механизм в крайних положениях коромысла.
lOA + lAB = lOA’ lAB – lOA = lOB”
Решая систему уравнений получим lAB = (lOB’ + lOB”) / 2; lOA = l’OB – lAB
По условия lBC = 0,35. Приняв масштабный коэффициент µl=lBC / BC = 0,35 / 175 = 0,002 м/мм.
Строим планы двух положений механизма. Из чертежа OB’ = 374 мм; OB” = 150 мм.
Длина шатуна АВ = (374+150) / 2= 262 мм
Длина кривошипа ОА = 374-262 = 112 мм
Натуральный значения длин звеньев lOA = OA. µl = 122. 0,002 = 0,244 м
lAB = 262. 0,002 = 0,524 м а’ = a / µl = 0,29 / 0,002 = 145 мм
в’ = в / µl = 0,55 / 0,002 = 275 мм
 Рассмотрим
коромыслово – ползунный механизм
Рассмотрим
коромыслово – ползунный механизм
Из Δ СВ’К (рис. 5) h= lBC. cos 35º = lBC. 0,82
Из Δ В’KD’ lBD = h / sin 30 º = 2h = 0,574 м.
На чертеж BD= lBD / µl = 0,574 / 0, 002 = 287 мм
(Здесь учтена рекомендация из задания, что угол давления на рабочем ходу max=30 º)