

1.2.12.2 Кручение стержня с круглым поперечным сечением
Под кручением понимается такой вид нагружения, при котором в поперечных сечениях стержня возникает только крутящий момент.д.ругие силовые факторы равны нулю. При расчете стержня на кручение решают две основные задачи. Требуется определить напряжения и найти угловые перемещения в зависимости от внешних моментов. Механизм деформирования стержня с круглым сечением представляют следующим образом: считают, что каждое поперечное сечение под действием внешних моментов поворачивается в своей плоскости как жесткое целое. Это - гипотеза плоских сечений. Выделим из стержня двумя поперечными сечениями элемент dz, а из него двумя цилиндрическими поверхностями с радиусами и + d выделим элементарное кольцо.
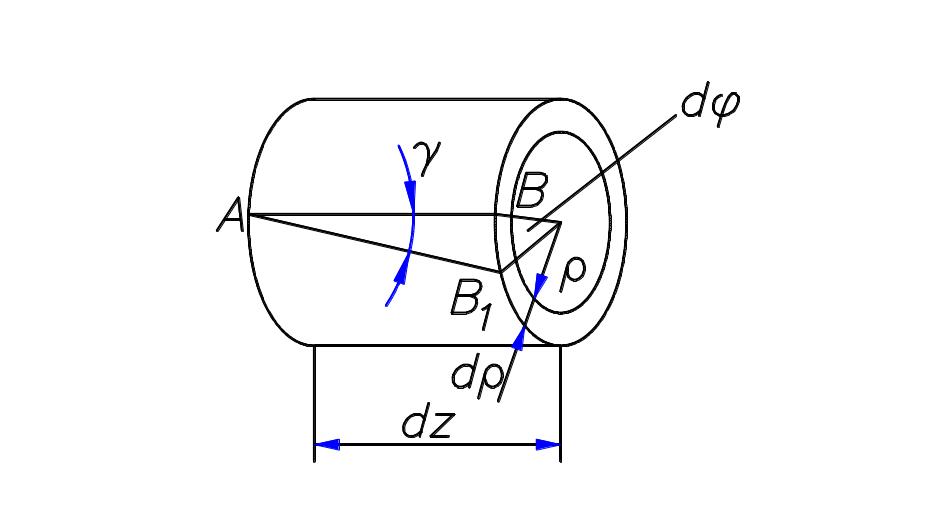
Правое торцевое
сечение при кручении поворачивается
относительно левого на угол d.
Образующая цилиндра АВ поворачивается
при этом на угол и
занимает положение АВ.
Отрезок ВВ равен
с одной стороны
![]() ,
а с другой
,
а с другой
![]() (поскольку углы малые). Угол
представляет собой не что иное, как угол
сдвига цилиндрической поверхности.
Обычно обозначают
(поскольку углы малые). Угол
представляет собой не что иное, как угол
сдвига цилиндрической поверхности.
Обычно обозначают
![]() .
.
Эта величина
называется относительным углом
закручивания. С учетом этого получаем
![]() .
.
По закону Гука
для сдвига
![]() .
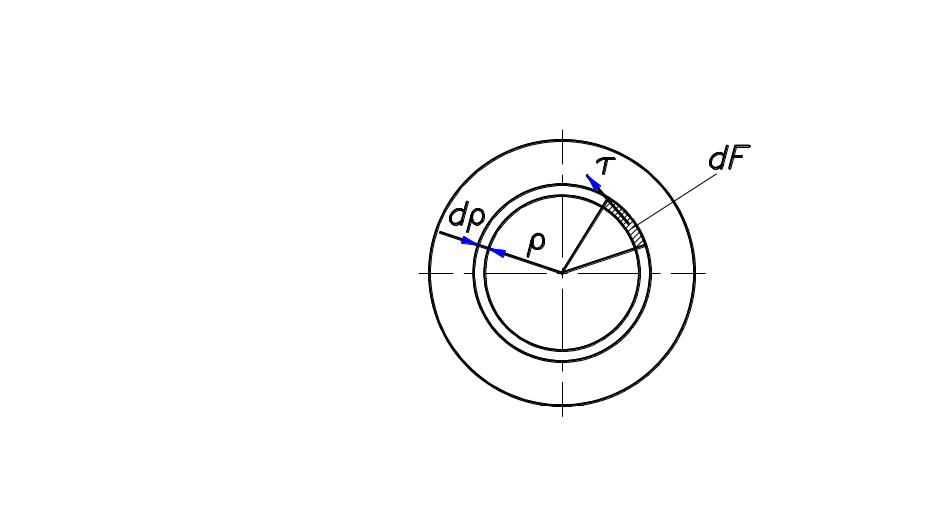
Крутящий момент, вызывающий в кольце
такие напряжения
.
Крутящий момент, вызывающий в кольце
такие напряжения
![]() .
.
Подставив сюда
значение , получим
![]() .
Интеграл
.
Интеграл
![]() (см4) называется полярным моментом
инерции сечения Jр.
(см4) называется полярным моментом
инерции сечения Jр.
Таким образом,
![]() или
или
 .
Произведение
.
Произведение
![]() называют жесткостью стержня при кручении.
называют жесткостью стержня при кручении.
На основе всего изложенного решение названных выше основных задач при расчете на кручение выглядит следующим образом, если Мк по длине не меняется:
 ,
,
где l - расстояние между сечениями, для которых определяется .
Величина
 называется полярным моментом сопротивления
(см3). Окончательно
называется полярным моментом сопротивления
(см3). Окончательно
 .
.
Величины геометрических характеристик сечения Jp и Wp можно найти интегрированием. Для круглого сплошного сечения получим
 ,
,
 .
.
Для кольцевого сечения
 ,
,
 .
.
Аналогичные решения существуют для некруглых сечений, но они более сложны.
1.2.13. Геометрические характеристики плоских поперечных сечений стержня
Для решения задач, прежде всего, связанных с изгибом, возникает необходимость оперировать некоторыми геометрическими характеристиками поперечных сечений стержня.
1.2.13.1 Статические моменты
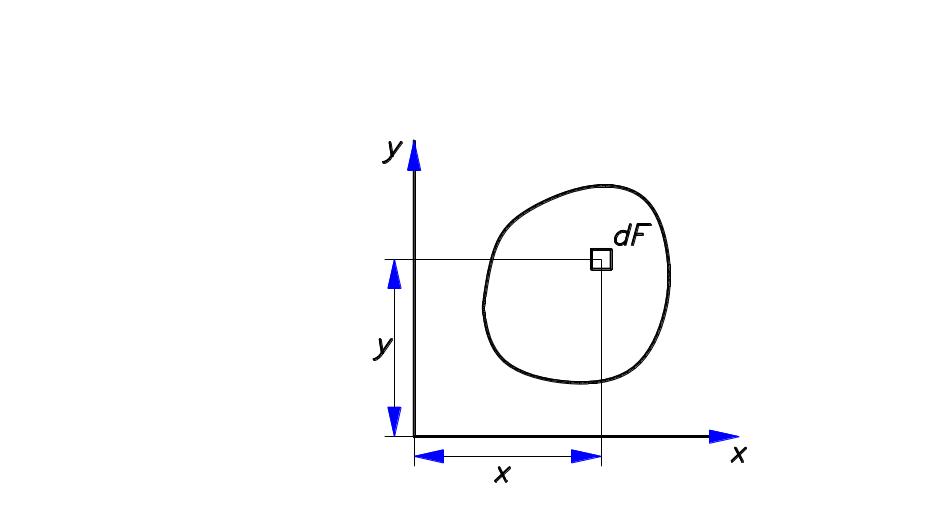
Для некоторого поперечного сечения возьмем интегралы по всей площади сечения
![]() ,
,
![]() .
.
Первый интеграл называется статическим моментом сечения относительно оси х, второй - относительно оси у. При параллельном переносе осей статический момент меняется на величину, равную произведению площади F на расстояние между осями.
Очевидно, можно подобрать такое положение оси, при котором статический момент относительно этой оси обращается в нуль. Такая ось называется центральной. Точка пересечения центральных осей называется центром тяжести сечения.
1.2.13.2 Моменты инерции сечения
Рассмотрим еще три следующих интеграла
![]() ;
;
![]() ;
;
![]() .
.
Первые два интеграла называется осевыми моментами инерции сечения относительно осей х и у. Третий - центробежный момент инерции относительно осей х, у. Минимальный момент инерции получается относительно центральной оси.
Следует отметить еще одно определение: оси, относительно которых центробежный момент инерции равен нулю, а осевые моменты принимают экстремальные значения, называются главными осями. Осевые моменты инерции относительно главных осей называются главными моментами инерции.