

Санкт-Петербургский Государственный Политехнический Университет
Факультет при ЦНИИ РТК
Курсовая работа по дисциплине
Теория машин и механизмов. «Исследование промышленного робота»
Выполнил:
студент группы 3171/2
Ерохин А.В.
Проверила:
Семенова Н.С.
Подпись______________
Санкт-Петербург
2012г.
Содержание
Начальные данные. Постановка задачи 3
3. Решение обратной траекторной задачи и обратной задачи контурного управления 9
4. Определение угловых скоростей и ускорений звеньев 13
5. Определение скоростей точек звеньев 15
6. Кинетостатический расчет механизма 18
7. Уравнение Лагранжа II рода 22
8. Выбор двигателей 24
9. Оценка динамических ошибок 26
10. Оценка геометрических и кинематических ошибок при ориентации схвата робота 29
Заключение 30
Начальные данные. Постановка задачи
На исследование представлен промышленный робот, имеющий три степени подвижности. Схема робота:

Начальные данные:
![]()
Требуется: определить рабочую область робота; разместить в пределах рабочей области объект, на поверхности которого будет совершаться работа – стол. Далее осуществить подведение рабочего органа к столу, в соответствии со следующим планом ускорений:

![]()
Движение рабочего органа по поверхности стола осуществляется по программному закону, описывающему контур прописной буквы «а».
Необходимо так же произвести кинетостатический расчет механизма и по полученным данным подобрать двигатели для обеспечения движения по каждой из степеней подвижности.
После выполнения задания требуется оценить результаты работы, а именно: оценить статические и динамические ошибки работы механизма, при необходимости ввести управление с целью компенсации динамических ошибок в процессе отработки роботом программного задания.
1. Функция положения промышленного робота
Зададимся системами координат, которые свяжем со звеньями робота. Выбранные системы координат будут использованы в дальнейшем на протяжении всей работы:

Третья система координат связана со схватом робота M, то есть его положение в этой системе координат опишется вектором:

Зная положение схвата M в третьей системе координат, можно определить вектор его положения в остальных системах, используя матрицы перехода:



где:
![]() — матрица перехода из s-й системы
координат в s-1, представленная в виде
произведения матриц: матрицы поворота
и матрицы смещения.
— матрица перехода из s-й системы
координат в s-1, представленная в виде
произведения матриц: матрицы поворота
и матрицы смещения.
С помощью рассчитанных матриц перехода, определим положение полюса схвата относительно нулевой системы координат:

Таким образом, нами получены уравнения
изменения положения точек схвата в
нулевой системе координат
![]() при изменении входных координат
при изменении входных координат
![]() .
По этим данным, при изменении входных
координат в указанных в задании пределах,
построим рабочую область робота:
.
По этим данным, при изменении входных
координат в указанных в задании пределах,
построим рабочую область робота:

Зададимся положением стола в рабочей области робота и его углом наклона:

Для того, чтобы стол полностью попадал в рабочую область, достаточно, чтобы его контур лежал между внутренней и внешней поверхностями рабочей зоны.
2. Обратная задача кинематического анализа
Суть обратной задачи кинематического
анализа — при известных законах изменения
![]() определить
определить
![]() .
.
В предыдущем параграфе была получена система:

Решая систему, получим законы изменения в виде:
![]()
![]()
![]()
![]()


![]()
3. Решение обратной траекторной задачи и обратной задачи контурного управления
По заданию, на столе необходимо изобразить контур прописной буквы «а». Для математического описания контура изобразим его в графическом редакторе с разметкой осей координат и снимем 24 точки через равные промежутки. По полученным точкам произведем интерполяцию с помощью многочлена, составленного в полярной системе координат. В ходе выполнения описанной работы, было установлено, что наиболее точную интерполяцию дает многочлен 15-ой степени с коэффициентами:
|
|



Где
![]() .
Отрисовка контура при изменении угла
полярной системы координат по такому
закону займет 10 секунд.
.
Отрисовка контура при изменении угла
полярной системы координат по такому
закону займет 10 секунд.
Располагая уравнением траектории в системе координат, связанной со столом, перейдем в нулевую систему координат, пользуясь матрицей перехода:

Получим вид траектории в нулевой системе координат, после чего определим скорости и ускорения степеней подвижности, из которых получим граничные условия для определения постоянных при интегрировании плана ускорений при позиционировании.
![]()
Движение схвата при позиционировании условно обозначим, как движение на участке AB, а программное движение по траектории — движение на участке BC. Константы интегрирования определим из граничных условий движения:

Для первой степени подвижности:
![]()
Для второй степени подвижности:
![]()
Для третьей степени подвижности:
![]()
Законы движения в итоге будут описаны однотипными уравнениями. Например, для первой степени подвижности:
![]()
![]()
![]()
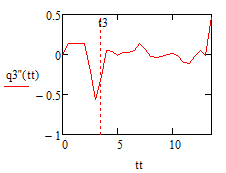
Приведем законы изменения координат, скоростей и ускорении (с лева на право, соответственно) для каждой степени подвижности.
Для первой степени подвижности:



Для второй степени подвижности:



Для третьей степени подвижности:


Построим полную траекторию движения полюса схвата M в нулевых координатах:
