

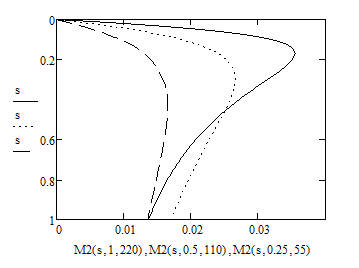
Учет активного сопротивления статорной обмотки в разомкнутой системе частотного управления
Целью является научиться рассчитывать зависимость питающего напряжения от частоты при сохранении неизменного критического момента.
Условие сохранения неизменного критического момента при изменении частоты записывают в виде:
![]() ,
,
где
![]() - критический момент двигателя как
функция относительной частоты
- критический момент двигателя как
функция относительной частоты
![]() (
(![]() ,
,
![]() - текущее и номинальное значения частоты
тока статора, соответственно) и
относительного питающего напряжения
- текущее и номинальное значения частоты
тока статора, соответственно) и
относительного питающего напряжения
![]() (
(![]() ,
,
![]() - текущее и номинальное значения питающего
напряжения, соответственно).
- текущее и номинальное значения питающего
напряжения, соответственно).
Используя уравнение критического момента:
 ,
,
где
![]() - абсолютное критическое скольжение (
- абсолютное критическое скольжение (
![]() - относительное критическое скольжение),
вычисляемое в виде:
- относительное критическое скольжение),
вычисляемое в виде:
 ,
,
из отношения получим выражение для питающего напряжения:
 .
.
Векторная модель асинхронного двигателя с кз ротором в осях
Целью является получение навыков использования модели обобщенной электрической машины (ОЭМ).
Для расчетов будем использовать
координатные оси
![]() ,
закрепленные на статоре. Уравнения
напряжений двухфазной модели с
приведенными обмотками ротора имеют
вид:
,
закрепленные на статоре. Уравнения
напряжений двухфазной модели с
приведенными обмотками ротора имеют
вид:
где
![]() - скорость вращения ротора.
- скорость вращения ротора.
Уравнения связи токов и потокосцеплений не зависят от выбора системы координат и выглядят:
![]()
![]()
где
![]() -
полные индуктивности статора и ротора,
-
полные индуктивности статора и ротора,
![]() -
главная (взаимная) индуктивность фаз
статора и ротора.
-
главная (взаимная) индуктивность фаз
статора и ротора.
Из двух последних уравнений потокосцеплений выразим токи ротора:
найденные токи подставим в уравнения для потокосцеплений статора:
Обозначим
 ,
тогда
,
тогда
и уравнения напряжений обмоток записываются относительно проекций тока статора и потокосцепления ротора:

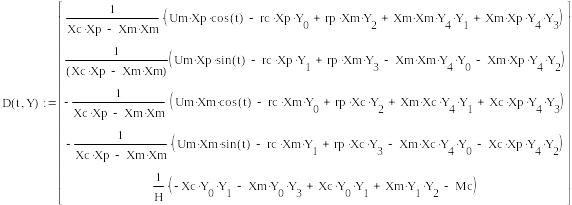
Приводя к форме Коши, получим:
Расчетная часть
Выполнить расчет полученной системы уравнений, учитывая, что питающие напряжения обмоток статора:
![]()
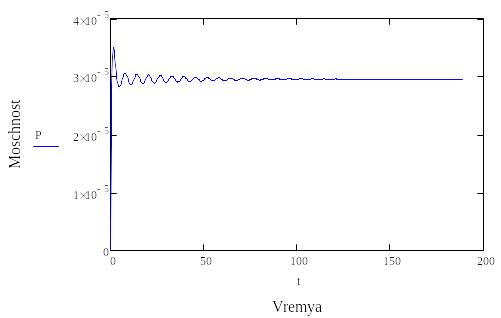
и уравнение момента:
![]() .
Вычисляемый момент с помощью уравнения
движения привода
.
Вычисляемый момент с помощью уравнения
движения привода
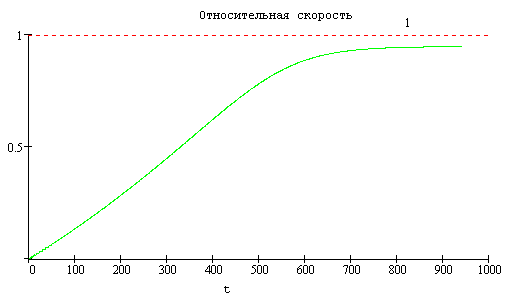
![]() позволяет определять скорость:
позволяет определять скорость:
![]() .
.
Уравнения напряжений и уравнение движения привода образуют систему из пяти уравнений с искомыми функциями тока статора, потокосцепления ротора и скорости.
Для расчета применяем систему MathCAD и следующие исходные данные в относительных единицах (приведенных к номинальным (базисным) частоте, мощности и моменту):
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Токи статора
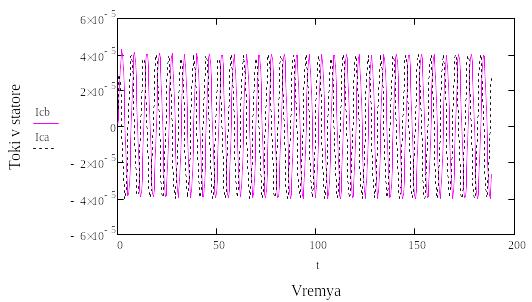
![]()
Электромагнитный момент
![]()
Заключение
В данной курсовой работе был смоделирован процесс пуска асинхронного двигателя с короткозамкнутым ротором. В результате расчета были получены основные показатели для двигателя заданной мощности, которые удовлетворяют предельно допустимым значением ГОСТа для серии двигателей 4А. Был произведен расчет и построение рабочих характеристик асинхронной машины, механические характеристики АД при частотном управлении, был произведен учет активного сопротивления статорной обмотки в разомкнутой системе частотного управления и показана векторная модель.