

31. Приборный интерфейс.
В соответствии с ГОСТ 26.003-80 соединение программируемых и непрограм-х электронных измерительных устройств применяемых в разных системах измерений должно осуществляться через многопроводный канал оющего пользования.
Структурная схема: ШД – шина данных, ЛД – линия данных, ШС – шина синхронизации, ШУ – шина управления.
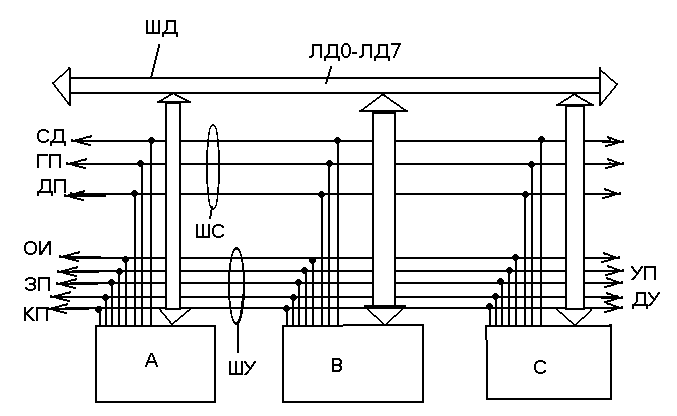
На рис изображена структура КОП, где А – устройство способное управлять передачей, передавать и принимать информацию. В – уст-во способное передавать и принимать информацию. С – уст-во способное передавать информацию либо только принимать. ШД используется для передачи адресных, програмных, управляющих данных и данных о состоянии. Тип информации передаваемой по ШД определяется состоянием линии УП(управление прибором). Период t в течении кот-го информация на линиях данных действительна зависит от наличия сигналов на СД(сопровождение данных). ШС управляет передачей информации по линиям данных. СД переводиться в ноль передающим центром(источником). ГП(готовность прибора) – линия обмена сигналами м/у приемником и источником. ГП управляется устройствами адресованными на прием. ДП(прием данных) наличие сигнала на этой линии указывает о конце приема информации приемниками. ШУ должна использоваться для передачи управляющих сигналов между контроллером и другими устройствами соединенными с КОП. КП(конец передачи) – устанавливается передатчиками в нужное состояние параллельно с передачей последнего байта данных. ОИ(очистить интерфейс) – используется при запуске системы. ЗО – запрос на обслуживание.
32. Проектирование программного обеспечения (по) измерительных систем (ис).
Без соответствующего ПО современные ИС, включающие в себя ЭВМ или МПТ, работать не могут. Программирование управляющихся систем с микро ЭВМ трудоёмко, потому что необходимо преодолеть трудности, накладываемые жёсткими ограничениями на программы и объёмами памяти. Например, при ручном составлении программ, содержащих 1000 команд, используется 10-17 чел/мес. При автоматизации время уменьшается на порядок.
ПО ИС можно разделить на:
ПО, создаваемое разработчиками ЭВМ и ИВК;
ПО, которое должно быть разработано пользователем ИС для решения конкретных задач.
Микро ЭВМ оснащается заводами-изготовителями ПО в виде ОС, позволяющих обеспечивать многопрограммную работу с учётом приоритета задач. Кроме того, можно осуществить автоматическую диагностику различных блоков или устройств ЭВМ, возможность программирования ПО для задач.
Пользователь ИС может применять типовые программы, разработанные для решения типовых задач (например, задач обработки экспериментальных данных, его планирования и т.д.). Но тем не менее пользователю ИИС приходится создавать ПО для обеспечения реализации определённой работы системы.
Один из путей создания ПО пользователя связан с использованием языков высокого уровня и с отладкой ПО с использованием автоматизации проектирования.
Если в ИС работает, например, одна ЭВМ, связанная с несколькими источниками информации, то она часто оказывается перегруженной. Поэтому в последнее время разрабатываются многоуровневые системы. Вторичная обработка информации и принятие решений осуществляют ЭВМ (МП) более высокого уровня. Первоочередной задачей, которую необходимо решать при проектировании ПО связано с рациональным распределением между аппаратной частью и ПО.