

3. Функционирование системы
Система управления бортовой аппаратурой (СУБ) является постоянно работающей системой, находящейся в режиме ожидания информации от КИС и БВС КА. Командная информация формируется в соответствии с алгоритмами программного обеспечения БВС и командами КИС.
СУБ имеет ряд функциональных интерфейсов с автоматизированной испытательной системой, КИС, БВС и ТМС КА, другими бортовыми системами (силовой и командный интерфейсы), целевой аппаратурой КА, РН.
При подготовке КА на СК система выполняет ряд технологических и защитных операций:
-ввод наземной блокировки на срабатывание пиросредств;
-контроль отсутствия напряжения на шинах управления пиросредствами и стыковки наиболее важных соединителей;
-контроль напряжения на шинах системы;
-включение и отключение питания технологических шин системы;
-подключение и отключение цепей цифрового интерфейса автоматизированная испытательная система – БВС.
Интерфейс системы с автоматизированной испытательной системой обеспечивается транзитными цепями:
наземной кабельной сети
по РН до соединителей разрывного типа на стыке адаптер – КА.
Функционально интерфейс обеспечивает управление технологической матрицей и контроль средств системы на испытательном стенде.
Интерфейс системы с КИС обеспечивает усиление и распределение команд, поступающих через КИС от земных станций.
Интерфейс системы с БВС обеспечивает получение команд для управления питанием электронного блока системы и обмен кодовой информацией.
Телеметрический интерфейс системы обеспечивает подключение телеметрических датчиков на входы ТМС. В течение опроса информация о датчиках поступает на входы ТМС с заданной периодичностью. Программное обеспечение БВС периодически инициирует программы теста электронного блока управления, при этом, контролируется работоспособность цепей обмена информацией, а также отсутствие дефекта выходных элементов электронного блока системы. Телеметрические кабели обычно экранируются.
Бортовая кабельная сеть
Бортовая кабельная сеть (БКС) предназначена для электрического объединения приборов, агрегатов и узлов внутри каждой из бортовых систем КА, а также для электрического объединения между собой всех бортовых систем.
БКС кроме обеспечения подключения наземного испытательного оборудования к КА осуществляет также передачу:
-электроэнергии потребителям;
-высокочастотных сигналов;
-командной и сигнальной информации.
Кабели должны удовлетворять следующим основным требованиям по:
-обеспечению электромагнитной совместимости бортовых систем КА;
- защите цепей от действия внешних электрических, магнитных и электромагнитных полей;
-защите от статического электричества бортовых систем КА;
-обеспечению заданных электрических характеристик и параметров, предъявляемых электрическими схемами бортовых систем.
Соответствие теплового режима как отдельных кабелей, так и кабелей, объединенных при монтаже на КА, обеспечивается рядом мероприятий (выбором сечения проводов, формирование кабельных трасс с учетом тепловых зон и т.д.).
БКС должна сохранять работоспособность в процессе наземной подготовки и на этапе эксплуатации КА.
Монтаж кабелей технологической и бортовой кабельных сетей проводится с учетом выполнения требований, заданных отраслевыми стандартами, техническими условиями, бортовыми системами и т.д. При этом должно обеспечиваться:
-удобство монтажа, демонтажа, обслуживания и ремонта при наземной подготовке КА;
-прокладка кабелей между аппаратурой и системами по трассам минимальной протяженности, свободного подключения соединителей, без резких изгибов, скручивания и механических повреждений;
-защита трасс и соединителей в зонах обслуживания кожухами и технологическими крышками;
-соединение и расстыковка соединительных кабелей в обесточенном состояниис предварительным снятием статического электричества.
При проектировании БКС реализуются следующие основные принципы:
-надежность электрических соединений и минимальная масса;
-обеспечение требований помехозащищенности;
-сохранение заданных характеристик в течение срока активного существования КА.
Надежность электрических соединений обеспечивается резервированием цепей питания и командных цепей. Снижение массы достигается не только за счет минимизации длин трасс, но и широким использованием цифровых каналов для связи бортовых систем между собой и наземной испытательной аппаратурой. Для обеспечения помехозащищенности аппаратуры бортовых систем проводятся следующие мероприятия:
-провода БКС группируются в кабели, кабели в кабельные трассы с учетом типа сигнала, нагрузки, степени возможного получения помех и восприимчивости к помехам;
-подключение к чувствительной к помехам аппаратуре с помощью витых экранированных пар проводов, что обеспечивает снижение уровней помех (излучаемых и воспринимаемых);
-экранирование низкочастотных кабелей;
-экранирование аппаратуры с применением внутренних экранов с металлизацией по ГОСТ19005-81;
-особо ответственные цепи выполняются с обеспечением сплошности экранирования.
Сохранение заданных характеристик БКС в течение срока активного существования КА достигается за счет применения проводов и радиочастотных кабелей, стойких к радиационному воздействию.
Механические интерфейсы
Механические интерфейсы рассмотрим на примере системы разделения КА от РБ.
Система разделения предназначена для жесткого крепления КА к разгонному блоку в процессе вывода на рабочую орбиту и отделения его в заданный момент времени по сигналу системы управления, обеспечивая заданные характеристики отделения (линейные и угловые скорости и т.п.).
В системах разделения используются следующие виды энергии:
-энергия экзотермических химических реакций;
-энергия механических устройств;
-другие виды энергии (потенциальная энергия гидравлических и пневматических устройств, тепловая, магнитная, электромагнитная энергия).
Все большее распространение находят комбинированные системы разделения, использующие несколько видов энергии для выполнения различных функций. Например, в системах разделения может использоваться энергия горения пиротехнических составов и механическая энергия пружинных толкателей.
Выбор оптимальных вариантов систем разделения осуществляется на основании их оценки по таким критериям, как надежность функционирования, масса систем разделения, импульс развиваемой силы, габариты, радиационная и термическая стойкость, нечувствительность к динамическим факторам, величина возмущений, накладываемых на движение КА при разделении, а также экономические, технологические, эксплуатационные и др. показатели.
Наиболее эффективными в настоящее время являются следующие системы разделения:
-пиротехнические системы, состоящие из пороховых аккумуляторов давления, соединенных с замками-толкателями системой трубопроводов;
-автономные пиротехнические замки с пиропатронами и пружинные толкатели, или автономные замки-толкатели;
-автономные детонационные замки, соединенные трансляторами подачи команды, и пружинные толкатели.
Рассмотрим одну из систем, например, систему разделения, состоящую из детонационных замков, объединенных транслятором подачи команд и пружинных толкателей. Данная система по сравнению с пиротехнической системой отделения имеет меньшую массу и габариты, одинаковую надежность, меньшие величины возмущений, накладываемых на КА при разделении. Она также обеспечивает компенсацию продольных и боковых нагрузок при эксплуатации. Конструктивная схема системы разделения представлена на рисунке.

Система отделения КГЧ от РН: 1-замок-толкатель; 2- ПАД; 3- коллектор; 4- трубопровод; 5- контактный датчик.
Система отделения состоит из 8-ми замков-толкателей поз.1, 4-х пороховых аккумуляторов давления (ПАДов) поз.2, соединенных между собой коллектором поз.3 и восьми трубопроводов поз.4, двух контактных датчиков поз.5, фиксирующих факт разделения. Замок-толкатель служит для жесткой стыковки КГЧ к переходному отсеку разгонного блока. ПАД предназначен для получения рабочего газа высокого давления, который по коллектору, в котором происходит выравнивание давления, через трубопроводы поступает в замки-толкатели.
Пороховой аккумулятор давления (ПАД) состоит из прочного титанового корпуса поз.1 (см. рисунок), во внутреннюю полость которого, в сепараторе поз.2 установлены пиротехнические патроны поз.3. Пиропатроны поз.5 установлены в пирогнезде поз.4.

Пороховой аккумулятор давления: 1-корпус; 2-сепаратор; 3-патрон; 4-пирогнездо; 5-пиропатрон.
Процесс разделения происходит следующим образом: при поступлении электрического питания на мостики пиропатронов, последние срабатывают и инициируют пиротехнические патроны, которые создают основную массу рабочего газа. Газ через коллектор и трубопроводы поступает на поршни поз. 2 в замках-толкателях (см. рисунок).
Замок-толкатель: 1-корпус; 2- поршень; 3- шток; 4-шариковый замок; 5-гильза.
Поршень под действием газа перемещает шток поз. 3, последний перемещаясь, освобождает шарики поз. 4 и тем самым снимает силовую связь между гильзой поз. 5 и корпусом поз. 1. При дальнейшем движении поршень (на ходе 60 мм) через гильзу поз. 5 сообщает необходимую относительную скорость отделения головному блоку.
Детонационный замок. В данной конструкции используется детонационный замок тянущего типа (см. рисунок). Замок состоит из корпуса поз. 1, в котором в кольцевую канавку запрессовано эластичное взрывчатое вещество (ЭВВ) поз. 4, штока с разрывным элементом поз. 2, амортизатора поз. 3, упирающегося в гайку поз. 5. Стык затягивается гайкой поз. 6, между двумя стыковочными шпангоутами расположена специальная рифленая шайба поз. 8. С двух сторон к корпусу подводятся трансляторы детонации поз. 7.
Замок детонации:1-корпус; 2-шток; 3-амортизатор; 4-ЭВВ; 5-гайка; 6-гайка упорная; 7-трансляторы; 8-шайба рифленая.
Трансляторы детонации служат для передачи детонационного импульса от электродетонаторов к исполнительным элементам разрывных замков. Транслятор (см. рисунок) состоит из детонационного шнура в многослойной металлической оболочке поз.1, двух усилителей поз.4, расположенных в наконечниках поз.З, и служащих для надежной передачи детонации к заряду замка, и накидных гаек поз 2, с помощью которых транслятор соединяется с замками. При срабатывании транслятор детонации не разрушается и продукты детонации локализуются внутри конструкции.
А-А
Общий вид транслятора детонации неразрушаемого:1-шнур ЭВ в оболочке; 2-гайка накидная; 3- наконечник; 4-усилитель.
Узел инициирования с ножом. В данной системе отделения используется узел инициирования, соединенный с ножом для прерывания электрической связи между блоком и космическим аппаратом (см. рисунок). В корпусе поз.1 узла инициирования установлен электродетонатор поз.2 и с двух сторон подведены трансляторы детонации поз.З. Кабель от электродетонатора заведен под хомут поз.4.
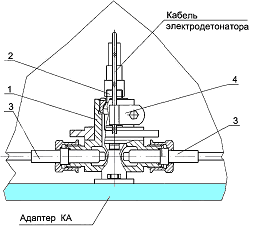
Узел инициирования с ножом: 1-корпус; 2-электродетонатор; 3-транслятор; 4-хомут.
Пружинные толкатели (см. рисунок) состоят из корпуса поз.1, в котором расположен шток поз.2 и пружина поз.З. В рабочем состоянии пружина сжата, шток удерживает пружину в таком состоянии, упираясь в кронштейн разгонного блока.

Пружинный толкатель: 1-корпус; 2-шток; 3-пружина; 4-гайка.
Стыковка космического аппарата с РБ осуществляется при помощи технологических стыковочных шпилек на ТК. После стыковки шпильки поочередно снимаются и устанавливаются детонационные замки, к которым подстыковываются трансляторы детонации.
Процесс разделения происходит следующим образом: подается электрический сигнал от системы управления на мостики накаливания электродетонаторов. Детонация по трансляторам передается на усилители. Через усилители инициируется ЭВВ в замках, создающее продукты детонации и ударную волну, действующие на шток замка. Происходит разрушение штока по кольцевой канавке, при этом снимается силовая связь между шпангоутом космического аппарата и кронштейнами РБ. Одновременно нож, расположенный в узле инициирования срабатывает и снимает электрическую связь между КА и РБ. После этого вступают в работу пружинные толкатели, которые обеспечивают разделение КА и РБ с заданной относительной скоростью.
Основные характеристики системы:
-относительная скорость отделения, м/с
-угловая скорость относительно осей КА, не более, град/с
-максимальное осевое усилие, воспринимаемое разрывным замком, Н
-максимальная сила толкателя, Н
-рабочий ход толкателя, мм
-сопротивление мостика накаливания, Ом
-минимальный ток срабатывания на один мостик накаливания, А
-скорость детонации, не менее, м/с
-масса системы, кг