

18. Гибкие обратные связи по току якоря и напряжению управляемого преобразователя. Назначение, исполнение.
Гибкие обратные связи по регулируемой координате есть первая производная от регулируемой координате. Гибкие обратные связи вводятся для повышения качества регулирования: устойчивость, величина перерегулирования, время затухания колебаний.
Как правило если имеется ЖОС используется и ГОС по этой же координате.
Получения сигнала первой производной.
Использование пасивной RC- цепочки

Использования операционного усилителя

Часто возникает необходимость для ввода второй производной по координате и установка по одной RC цепи или ОУ то ни чего не получится. Это достигается след образом:
а )
производная ЭДС генератора. На главный
полюс укладывается обмотка
)
производная ЭДС генератора. На главный
полюс укладывается обмотка
б)Схема ЭКГ 5А используется обмотка маг. усилителя

 Один
из вариантов ГОС по току якоря
Один
из вариантов ГОС по току якоря
Сердечник доп.
полюсов
![]()
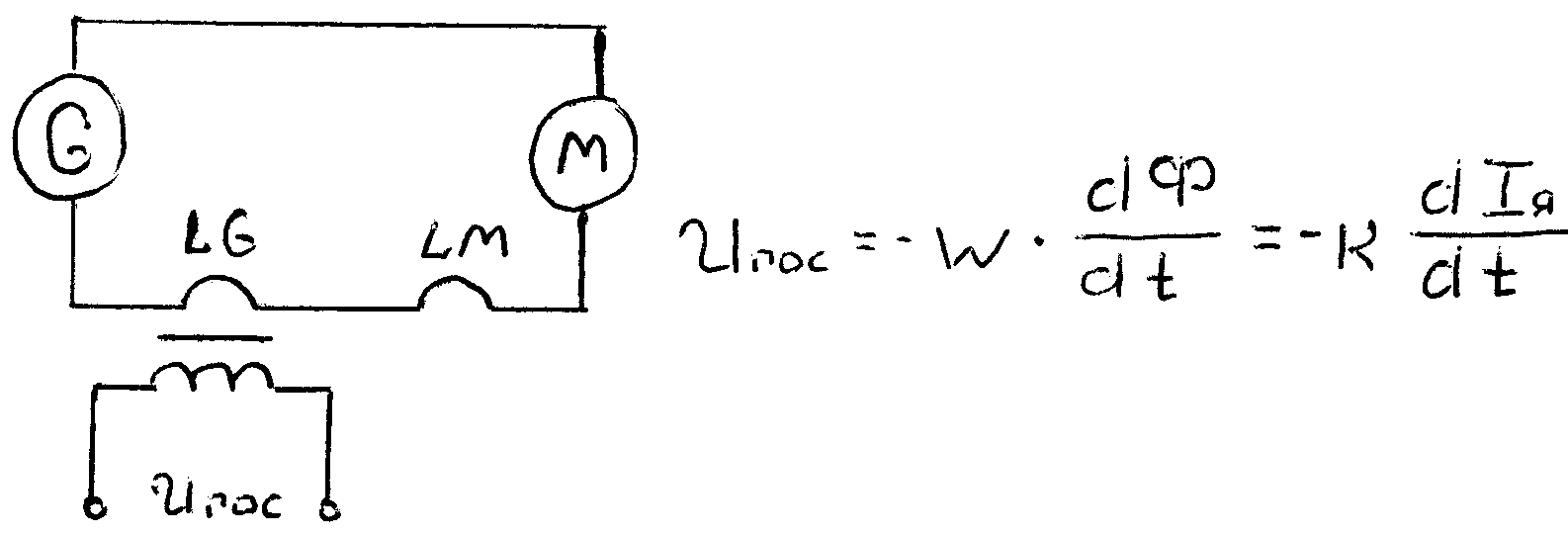
ГОС по току якоря Г-Д

Г ОС
напряжению управляемого преобразователя
ОС
напряжению управляемого преобразователя
Влияние ГОС на ПП
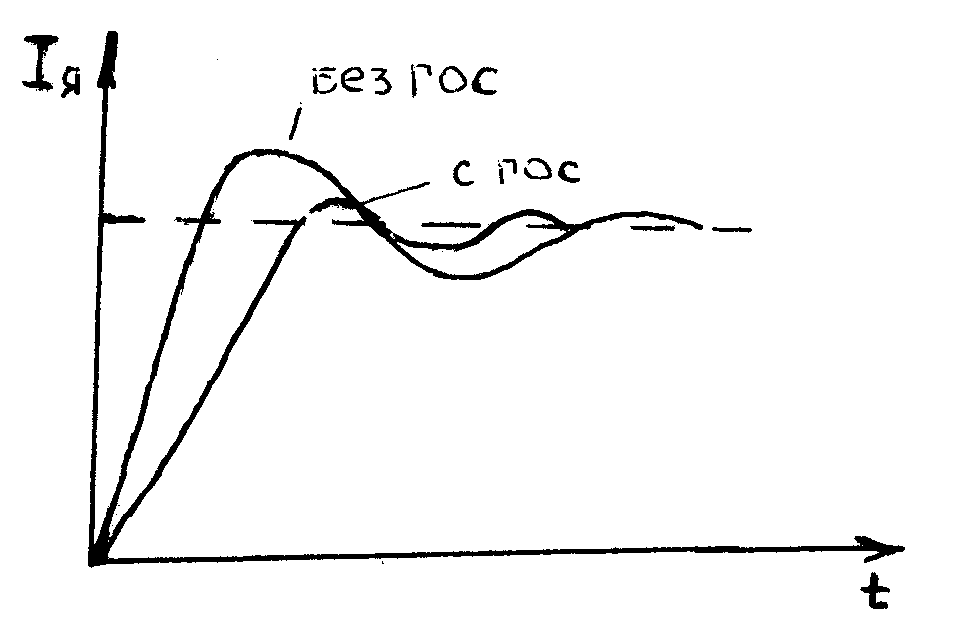
Введение ГОС уменьшает колебания, уменьшает перерегулирование, но увеличивают длительность перходного процесса

Если будет ГОС то она будет припятствовать уменьшению скороти
19.Датчики эдс двигателя постоянного тока, упругого момента, Iя, u, ω.
Датчик ЭДС двигателя:
![]()
Желание уменьшить статическую ошибку по скорости;
Не желание использовать тахогенераторы в качестве датчика скорости;
Развитие ПП техники;
Появление и внедрение ТП-Д, отпала необходимость системы форсирования по
 .
.
![]()
Датчик двигателя ЭКГ-20 (рис1).
U2 – датчик U2 двигателя.
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Датчики момента:
Косвенные моменты определения момента:
Торсионные приборы: тензометрические датчики.
Стрелки
но номинально нагруженный вал, Едв
в изм. Обмотке будет измеряться
необходимость протестировать магнитный
прибор. БМП, МИМ – по
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() СОНН.
СОНН.
Косвенное определение момента:
![]() ;
;
![]() ;
;
![]() ;
;
![]()

2 Ε ω 0. Устройство выбора зазора в передачах. Назначение, исполнение, наладка.
to
Εдоп
0,7Iст
ω1нач
t













![]()
![]() -стремиться
к нулю,
-стремиться
к нулю,
![]()
.
Ограничить ускорение;. Зафиксирование
во времени
![]() - все зазоры выбраны и оценить, что до
- зазор был;
- зазора нет, следовательно, максимальное
ускорение, разгон ЭП.
- все зазоры выбраны и оценить, что до
- зазор был;
- зазора нет, следовательно, максимальное
ускорение, разгон ЭП.
![]() -
определяет величину ускорения.
-
определяет величину ускорения.
НЭ
– узел выделения модуля ключ БСРИ –
замкнут {![]() зависит
от сигнала ОС по
зависит
от сигнала ОС по
![]() };
};
3.
![]() , Мс
стремиться к нулю,
, Мс
стремиться к нулю,
![]() ;
Увеличивается в 10, 15, 20 раз.
;
Увеличивается в 10, 15, 20 раз.
![]() разрыв
ключа,“-“ос
- снято ограничение ускорения
разрыв
ключа,“-“ос
- снято ограничение ускорения
![]()

Коэффициент динамичности
