

4.12 Ступенчатый редуктор. Передаточное число, моменты и кпд
Как было отмечено ранее, многозвенный зубчатый механизм можно рассматривать состоящим из нескольких трехзвенных зубчатых механизмов, каждый из которых называют ступенью. Для получения больших передаточных чисел обычно применяют редукторы с двумя и более парами колес, то есть многоступенчатые редукторы
В качестве примера рассматривается двухступенчатый редуктор (рис. 6.26а).
О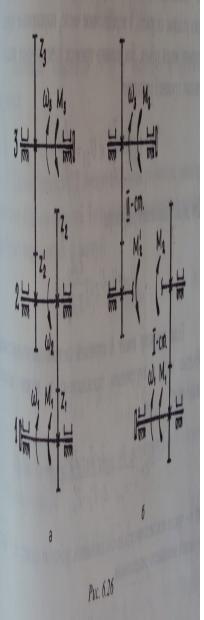 бщее
передаточное отношение механизма
составляет:
бщее
передаточное отношение механизма
составляет:
![]() которое можно представить
в виде:
которое можно представить
в виде:
![]() и, приняв во внимание,
что
и, приняв во внимание,
что
![]() получится
получится
![]()
то есть передаточное отношение двухступенчатого редуктора равно произведению передаточных отношений отдельных его ступеней.
В большинстве случаев при исследовании зубчатых механизмов удобнее использовать не передаточное отношение, выраженное через угловые скорости, а передаточное число, выраженное через отношение чисел зубьев. Для данного примера передаточное число отдельных ступеней составляет
![]() а для двухступенчатого
редуктора:
а для двухступенчатого
редуктора:
![]() Если редуктор имеет К
ступеней (в него могут входить и зубчатые
пары с внутренним зацеплением), то можно
записать
следующее:
Если редуктор имеет К
ступеней (в него могут входить и зубчатые
пары с внутренним зацеплением), то можно
записать
следующее:
 где n
- число последовательно
соединенных зубчатых колес; m
- число
ступеней внешнего
зацепления.
где n
- число последовательно
соединенных зубчатых колес; m
- число
ступеней внешнего
зацепления.
Для определения связей между моментами двухступенчатый редуктор разбивают на две отдельные ступени I и II (рис. 6.26б), представляющие собой два простых редуктора.
В этих редукторах моменты М, и №2 будут активными, а моменты М1 и M2 - полезного сопротивления. Тогда согласно формуле
 или с учетом
(6.14):
или с учетом
(6.14):
![]() Коэффициент полезного
действия всего редуктора (6.10) будет
равен
Коэффициент полезного
действия всего редуктора (6.10) будет
равен
П одставив
выражение (6.15) в последнее
соотношение, получится
одставив
выражение (6.15) в последнее
соотношение, получится
Т![]() аким
образом,
КПД двухступенчатого
редуктора равен произведению КПД его
ступеней. Тогда
момент на выходном валу редуктора
будет
определятся
по формуле
аким
образом,
КПД двухступенчатого
редуктора равен произведению КПД его
ступеней. Тогда
момент на выходном валу редуктора
будет
определятся
по формуле
![]()
а Для редукторе, имеющего К ступеней
К![]() роме
того, для каждого
простого редуктора I и II согласно (6.13)
можно записать
роме
того, для каждого
простого редуктора I и II согласно (6.13)
можно записать

где М4" и М4" - внешние моменты, приложенные к корпусам этих редукторов, а их сумма М4' + М4" = М4 представляет собой момент, приложенный к корпусу ступенчатого редуктора.
Если сложить выражения (6.17) и (6.18), то получится уравнение внешних моментов в виде:
м, + м2 + м4 = о.
Исследование планетарного редуктора
Планетарные механизмы относятся к многозвенным зубчатым механизмам с подвижными геометрическими осями одного или нескольких колёс. Основными достоинствами таких механизмов являются достаточно высокий их КПД при передаче мощности до 750 кВт и больше, компактность планетарных узлов, а также соосность входного 1 и выходного звеньев.
Н а
рис. 6.27 представлена схема простейшего
четырехзвенного планетарного редуктора
- редуктора Джеймса.
а
рис. 6.27 представлена схема простейшего
четырехзвенного планетарного редуктора
- редуктора Джеймса.
Рис. 6.27
Зубчатое колесо 1, вращающееся вокруг неподвижной оси называется солнечным, или Центральным, а колесо. 2 с вращающейся осью, которое обкатывает центральное колесо - планетарным, или сателлитом. Для уменьшения сил давления на зубья колес планетарные механизмы могут иметь два и более симметрично расположенных сателлита с одинаковыми числами зубьев. Подвижное звено & на котором располагаются оси сателлитов , называется водилами а неподвижное центральное колесо 4 (зубчатый венец) - опорным. Как правило, планетарные механизмы изготовляются соосными, то есть оси входного и выходного звеньев совпадают. Они обладают одной степенью свободы и обязательно имеют опорное колесо. На практике часто встречаются механизмы не имеющие опорного звена, у которых число степеней свободы больше единицы (W > 1). Такие механизмы называются дифференциальными.
Существуют два метода исследования планетарных механизмов: графический, который сводится к построению треугольников скоростей каждого колеса и нахождению соответствующих угловых скоростей (в данном разделе этот метод не рассматривается) и аналитический, который ^основывается на способе обращения движения. При аналитическом методе следует придерживаться следующей последовательности
Планетарный редуктор (рис. 6.28а) превращают в непланетарный (рис. 6.286) закреплением водила. При этом всем звеньям механизма сообщается угловая скорость, равная по величине и противоположная По направлению угловой скорости водила W3. Тогда водило 3 становится неподвижным, а опорное звено 4 (зубчатый венец) - подвижным, и механизм обращается из планетарного в механизм с неподвижными осями колес, то есть в двухступенчатый редуктор, состоящий из последовательна соединенных пар зубчатых колес 1, 2 и 2, 4 (рис. 6.286).

2. Составляется таблица угловых скоростей звеньев для обоих механизмов.
Звено механизма |
В планетарном механизме |
В непланетарном механизме |
1 |
W1 |
W1-W3 |
3 W |
W 3 |
W3-W3=0 |
4 |
0 |
-W3 |
Угловая скорость звена 2 не входит в таблицу, так как колесо 2 является промежуточным, а общее передаточное отношение
н![]() е
зависит от угловых скоростей промежуточных
зубчатых колес. В технике такие колеса
называются паразитными. В действительности
же эти колеса обеспечивают необходимое
направление вращения выходного вала,
и их наличие влияет на знак передаточного
отношения.
е
зависит от угловых скоростей промежуточных
зубчатых колес. В технике такие колеса
называются паразитными. В действительности
же эти колеса обеспечивают необходимое
направление вращения выходного вала,
и их наличие влияет на знак передаточного
отношения.
Определяется передаточное отношение. Вначале рассматривается непланетарный механизм, для которого

п![]() риняв
во внимание что W1/W3=U1/3
передаточные
отношения
планетарного
механизма, получают
риняв
во внимание что W1/W3=U1/3
передаточные
отношения
планетарного
механизма, получают
а следовательно,
следовательно,
 Неизвестные
числа зубьев могут быть определены из
условия соосности механизма с учетом
геометрии его строения.
Для
данного редуктора (рис. 6.27) можно записать
Неизвестные
числа зубьев могут быть определены из
условия соосности механизма с учетом
геометрии его строения.
Для
данного редуктора (рис. 6.27) можно записать
![]()
где (d1 d2 d4 4 - диаметры начальных окружностей соответствующих колес.
Согласно выражению (6.6)
![]() Тогда
Тогда

Необходимо отметить, что каждая конкретная схема планетарного редуктора имеет свое, вполне определенное выражение для подсчета значения передаточного отношения.
4. Определяются направления угловых скоростей и моментов.
При превращении планетарного редуктора в непланетарный происходит переход от одной координатной системы к другой. Если в первом варианте система связана с корпусом редуктора, то во втором - с валом 3. Но величина и направление моментов от выбора системы отсчета не зависят, поэтому при переходе от планетарной схемы к непланетарной моменты и по величине, и по направлению сохраняются.
Для представленного на рис. 6.28а редуктора момент М1 является активным, а М3 - моментом полезного сопротивления.
Направления угловых скоростей зависят от знака, то есть если U1/3 > 0, то в планетарном редукторе направления W1 и W3 совпадают,
если U1/3 < О, то направления W1 и W3 противоположны.
Направление угловой скорости (W1-W3) с которой вращается вал непланетарного редуктора, зависит от численных значений W1 и W3 Если W1>W33, то оно останется без изменения по отношению к направлению вала 1 планетарного редуктора, а если W1, < W3, то это направление будет противоположным.
5. Выявляется ведущее звено в непланетарном механизме направлениям угловой скорости и момента. Данная процедура необходима для правильной записи выражения показывающего связь между моментами в ступенчатом редуктор (6.16) согласно которому
В![]()
![]() рассматриваемом примере (рис. 6.286) при
W1,
>
W3
направления момента M1
и угловой скорости (W1-W3)
совпадают, следователь, но, звено 1
является ведущим (вщ), а ведомым (вм)
будет звено 4 Тогда формула (6.19) записывается
в виде
рассматриваемом примере (рис. 6.286) при
W1,
>
W3
направления момента M1
и угловой скорости (W1-W3)
совпадают, следователь, но, звено 1
является ведущим (вщ), а ведомым (вм)
будет звено 4 Тогда формула (6.19) записывается
в виде
6. Определяются значения моментов.
Для этого решаются уравнения (6.20) и (6.13).
Подставляя в последнее уравнение выражение (6.20), получится
![]()
7. Вычисляется КПД планетарного редуктора. Согласно формуле (6.10) КПД из выражения
д ля
исследуемого редуктора примет следующий
вид:
ля
исследуемого редуктора примет следующий
вид:
 После
подстановки зависимости (6.21) в последнее
выражение, получают
После
подстановки зависимости (6.21) в последнее
выражение, получают
