

Вопросы к экзамену по пм
Классификация типовых механизмов, узлов и деталей рэс.
Механизм - система соединенных элементарных звеньев.
Рабочие машины предназначены для изменения формы материала.
Двигатели - преобразование любого вида энергии в механическую работу.
Генераторы - преобразование движения в энергию. Механизмы, предназначенные для передачи движения от двигателя к рабочей зоне, наз-ся передаточными.
Существуют: деталь, сборочная единица, комплекс, комплект.
Деталь - изделие из однородного материала без монтажных элементов;
Комплект - два или более изделий, не соединённых между собой, но составляющих набор
Исходя из назначения и особенностей работы, механизмы РЭС можно подразделить:
Механизмы проводов, антенн
Механизмы дистанционных передач (обеспечивают дистанционную передачу параметров исполнительных устройств на экраны индикаторных устройств)
Механизмы следящих систем (механизмы систем автоматического сопровождения, программных устройств, рулевых приводов)
Механизмы ручной настройки (составная часть аппаратуры, которая обеспечивает настройку аппаратуры оператором)
Механизмы электромеханической настройки (используются для дистанционной настройки РЭС)
Отсчетные механизмы (обеспечивают отсчет величины переменного параметра с заданной точностью, создавая кинетическую связь элемента настройки и указателя)
Механизмы перемещения носителей информации (используются в устройствах магнитной записи и воспроизведения информации)
Структурные элементы механизмов. Кинематические пары.
Соединение двух соприкасающихся звеньев, допускающее их относительное движение. Кинематическая цепь – это система звеньев, соединенных с помощью кинематических пар (замкнутые и незамкнутые).
Механизм – связанная система звеньев, движущаяся как единое целое.
Механизм – кинематическая цепь, в которой при заданном законе движения одного или нескольких звеньев остальные звенья движутся определенным образом.
Звено – это одно или несколько жестко соединенных тел, находящихся в определенном движении. Звено механизма может быть простым (деталь) и сложным (составное). По конструктивным признакам звенья разделяются:
o Валы
o Зубчатые колеса
o Гибкие связи
По деформативности:
o Жесткие
o Гибкие
По характеру движения
o Звено, совершающее полнооборотное вращение (кривошипное)
o Звено, совершающее неполнооборотное вращение – коромысло
o Возвратнопоступательное движение – ползун
o Сложное движение – шатун
o Неподвижное звено – стойка
Классы кинематических пар.
1-й класс (S=1, H=5) шар – плоскость.
2-й класс (S=2, H=4) цилиндр – плоскость.
3-й класс (S=3, H=3) сферическая, плоскостная.
4-й класс (S=4, H=2) цилиндрическая.
5-й класс (S=5, H=1) поступательная (ползун), вращательная, винтовая.
Составляющие модели прочностной надежности.
Оценка прочностной надежности основана на расчетной модели или схеме.
Модель – совокупность условий, представлений, зависимостей, отражающих данный объект или явление.
Расчетная схема – модель прочностной надежности.
При построении модели учитываются только значимые факты. К каждой модели можно поставить в соответствие деталь, и к каждой детали можно поставить в соответствие схему.
Составляющие модели прочностной надежности:
Модель материала
Модель формы
Модель нагружения
Модель разрушения
Модель прочностной надежности обуславливает запас прочности, а также вероятность безотказной работы.
Метод сечений.
Метод сечения. Практически этот метод сводится к выполнению следующих операций:
Разрезаем брус на две части;
Отбрасываем одну из частей;
Заменяем действие отброшенной части на оставшуюся шестью силовыми факторами;
Определяем значение внутренних силовых факторов (составляющие главного вектора сил и главного момента) из условий равновесия для отсеченной части бруса;
Устанавливаем вид нагружения.
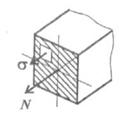
Напряжение в точке.
Совокупность напряжений, действующих по различным площадкам, проведенным через данную точку, называется напряженным состоянием в точке.
Деформация в точке.
Статически определимые системы.
В статически определимых системах или задачах число неизвестных усилий определяется из уравнения равновесия.
Статическая система называется статически определимой, если число опорных реакций соответствует числу степеней свободы, и величины опорных реакций по принципу механического равновесия можно определить из величин внешних нагрузок.
Статически неопределимые системы.
Механическая система, для которой реакции связей и внутренне-силовые факторы не могут быть определены с помощью уравнений равновесий и метода сечений, называется статически неопределимой. Статически неопределимые системы отличаются от статически определимых большим числом наложенных связей.
Температурные напряжения.
Повышение и понижение температуры материала вызывает в нем удлинение или укорочение. А при деформациях возникают температурные напряжения (термоупругие напряжения). Большие ТН возникают при неравномерном охлаждении материала и вследствие различия коэффициента линейного температурного растяжения между частями детали в сопряжении
Деформация и напряжение при растяжении, сжатии. Закон Гука, условие прочности при растяжении, сжатии.
При растяжении стержня его первоначальная длина L увеличивается до L1. Разность между этими значениями называется абсолютным удлинением:
∆l = L1 - L.
Отношение абсолютного удлинения к первоначальной длине называется относительным удлинением и обозначается ε:
ε = ∆l / L.
На основании закона Гука для упругих деформаций существует пропорциональная зависимость между нормальным напряжением и относительным удлинением:
σ = Еε,
где Е — коэффициент пропорциональности, называемый модулем упругости при растяжении, кгс/см2 (Па).
Если представить деформацию сжатия, обратную растяжению, в процессе которой тело под действием внешних сил сжимается, то для обеих деформаций можно вывести общее условие прочности детали: действительное напряжение в детали не должно превышать допустимого при растяжении [σ]р или при сжатии [σ]сж.
В тех случаях, когда из условия прочности надо определить площадь поперечного сечения детали, пользуются формулой
F = P / [σ]р(сж).
Исходя из гипотезы плоских сечений, можно предположить, что напряжения при растяжении и сжатии в пределах каждого сечения не меняются. Поэтому напряжение можно рассчитать по формуле
Рис. 20.3 |
где Nz — продольная сила в сечении; А — площадь поперечного сечения. Величина напряжения прямо пропорциональна продольной силе и обратно пропорциональна, площади поперечного сечения. |
растяжением (сжатием) понимают такой вид деформации стержня, при котором в его поперечном сечении возникает лишь один внутренний силовой фактор - продольная сила Nz.
Нормальные напряжения прямо пропорциональны
линейным деформациям.
![]() .
Коэффициент пропорциональности Е –
модуль упругости (модуль Юнга). Он
характеризует жесткость материала,
т.е. его способность сопротивляться
деформированию и определяется
экспериментально. Каждому материалу
присуще свое значение модуля упругости.
.
Коэффициент пропорциональности Е –
модуль упругости (модуль Юнга). Он
характеризует жесткость материала,
т.е. его способность сопротивляться
деформированию и определяется
экспериментально. Каждому материалу
присуще свое значение модуля упругости.