

1 Кинематический расчет привода
Задачи кинематического расчета привода включают:
- выбор электродвигателя,
- определение передаточного отношение редуктора и разбивка его по ступеням,
- определение частот вращения и угловых скоростей валов привода (рис.1).
1.1 Выбор электродвигателя
Для машин заданного типа применяют асинхронные электродвигатели переменного тока, которые выбирают по следующим характеристикам:
1.![]() -
требуемая мощность электродвигателя
(кВт);
-
требуемая мощность электродвигателя
(кВт);
2.
![]() -
частота вращение вала электродвигателя
(об/мин).
-
частота вращение вала электродвигателя
(об/мин).
Д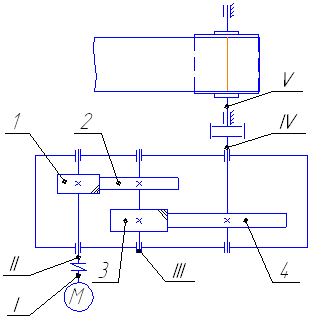 ля
решения задачи выбора строится расчетная
схема с обозначениями:
ля
решения задачи выбора строится расчетная
схема с обозначениями:
1 – Шестерня быстроходной ступени;
2 – Колесо быстроходной ступени;
3 – Шестерня тихоходной ступени;
4 – Колесо тихоходной ступени;
I – вал двигателя;
II – вал входной;
III – вал промежуточный;
IV – вал выходной;
V – вал барабана;
рис.1
Для выбора электродвигателя определяем требуемую его мощность и частоту вращения.
Определим мощность, развиваемую на барабане:
![]()
Где
![]() -
угловая
скорость барабана,
-
угловая
скорость барабана,
![]() -
момент вращения барабана.
-
момент вращения барабана.

Требуемая мощность двигателя:
![]()
Где
![]() -
общий КПД привода, который определяется
произведением частных КПД элементарных
механизмов:
-
общий КПД привода, который определяется
произведением частных КПД элементарных
механизмов:
![]() ,
,
где
![]() - КПД муфты согласно табл. [1,с.6]
- КПД муфты согласно табл. [1,с.6]
![]() ;
;
![]() - КПД подшипников
согласно табл. [1,с.6]
- КПД подшипников
согласно табл. [1,с.6]
![]() ;
;
![]() - КПД зубчатой пары
согласно табл. [1,с.6]
- КПД зубчатой пары
согласно табл. [1,с.6]
![]() ;
;
![]() .
.
Тогда требуемая мощность электродвигателя будет рассчитываться по следующей формуле:
![]() .
.
Частота вращения барабана:
![]() об/мин.
об/мин.
Далее
по табл. 24.9 [1,с.417] подбираем электродвигатель
с требуемой мощностью и частотой вращения
ротора ближайшим к
![]() и
и
![]() .
При подборе Р допускается перегрузка
двигателя до 8 %. Выбираем двигатель
.
При подборе Р допускается перегрузка
двигателя до 8 %. Выбираем двигатель
![]() = 4 кВ.
= 4 кВ.
Рекомендуется выбирать электродвигатель с меньшей высотой h (высоты оси вала от опорной поверхности лапок двигателя), с большей частотой вращения вала. Так как масса, размеры и стоимость такого двигателя меньше.
Частота вращения вала электродвигателя назначается с учетом кинематической возможности привода, которая определяется его общим передаточным отношением:
![]() ;
;
![]() .
.
Кинематическая
возможность двухступенчатого
цилиндрического редуктора:
![]() .
.
![]() Общее передаточное
отношение не многим больше 50 поэтому
согласно таблице 24.9 [1,с.417] выбираем
асинхронный двигатель 4А112М2У3:
Общее передаточное
отношение не многим больше 50 поэтому
согласно таблице 24.9 [1,с.417] выбираем
асинхронный двигатель 4А112М2У3:
![]() кВт,
кВт,
![]()
1.2 Определение общего передаточного отношения привода и разбивка его по ступеням
Общее передаточное отношение редуктора:
![]() ,
,
где
![]() - передаточное отношение быстроходной
ступени редуктора;
- передаточное отношение быстроходной
ступени редуктора;
![]() - передаточное
отношение тихоходной ступени редуктора.
- передаточное
отношение тихоходной ступени редуктора.
Для двухступенчатого редуктора по развернутой схеме согласно таблице 1.3 [1,с.8]:
![]() ,
,
![]() ;
;
![]()
1.3 Определение угловых скоростей и частот вращения валов привода Согласно кинематической схеме:
![]() об/мин,
тогда:
об/мин,
тогда:
![]() 1/с;
1/с;
![]() об/мин;
об/мин;
![]() 1/c;
1/c;
![]() об/мин;
об/мин;
![]() 1/c.
1/c.
2 Определение вращающих моментов действующих на валах привода
Вращающий
момент (![]() )
на приводном валу определяется по
формуле:
)
на приводном валу определяется по
формуле:
![]() Нм;
Нм;
Момент на валу тихоходной ступени редуктора:
![]() Нм;
Нм;
Момент на валу III определяется по формуле:
![]() Нм;
Нм;
Момент на валу быстроходной ступени определяется по формуле:
![]() Нм;
Нм;
Момент на валу I:
![]() Hм.
Hм.