

Работа 6. Трехфазный синхронный двигатель [1, с. 352…372; 2, с. 289…318]
Цель работы – экспериментальное исследование свойств синхронного двигателя (пуск, угловые и U-образные характеристики).
I. Программа работы
1. Ознакомление с конструкцией трехфазного синхронного двигателя и его паспортными данными.
2. Пуск синхронного двигателя.
3. Снятие угловых характеристик.
4. Снятие U-образных характеристик.
II. Общие сведения и описание установки
Основными частями синхронной машины (рис.1) являются: статор с трехфазной обмоткой, соединенной звездой или треугольником (выводы С1, С2, С3, С4, С5, C6 на рис.6.1), ротор или неявнополюсный, или с явно выраженными полюсами и обмоткой постоянного тока (И1, И2 на рис.1), питающийся от возбудителя В. Возбудитель может выполняться в виде генератора постоянного тока параллельного возбуждения (выводы обмотки, возбуждения Ш1, Ш2 на рис.1). В лаборатории ЭМ СПГГИ вместо возбудителя применяется другой источник постоянного тока (блок 209 – выпрямитель).
Рис. 6.1
На роторе синхронных двигателей большой и средней мощности, кроме обмотки возбуждения, имеется короткозамкнутая пусковая обмотка, аналогичная короткозамкнутой обмотке ротора асинхронного двигателя. В двигателе, установленном лаборатории ЭМ СПГГИ в качестве пусковой обмотки двигателя используется трехфазная роторная обмотка, а в качестве обмотки возбуждения эта же обмотка в однофазном варианте.
Принцип действия трехфазного синхронного двигателя основан на том, что вращающееся магнитное поле статора взаимодействует с электромагнитами ротора. Вращающееся магнитное поле создается трехфазным током обмотки статора, электромагнитное поле ротора возбуждается постоянным током. Частота вращения магнитного поля статора n0 и ротора n определяются только частотой тока f и числом пар полюсов обмотки р:
![]() . (1)
. (1)
Под действием нагрузки на валу синхронного двигателя происходит пространственное смещение ротора по отношению к вращающемуся полю статора на угол , приводящее к возрастанию вращающий момента, препятствующего этому смещению.
![]() , (2)
, (2)
где – угол нагрузки, равный сдвигу по фазе между фазным напряжением U1, и ЭДС E0; x – синхронное сопротивление фазы статора.
Зависимость МЭМ=f()» при Iв=const, U1=const называется угловой характеристикой неявнополюсного синхронного двигателя, которая изображается в третьем квадранте (линия 1, рис.6.2).Линией 3 отмечена характеристика явнополюсного двигателя, точка 1 ограничивает рабочий участок, на котором MЭМ≈k.
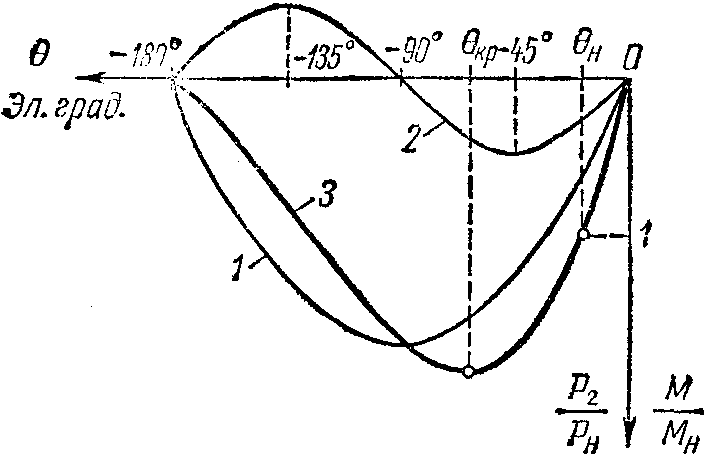

Рис. 6.2 Рис. 6.3
При изменении нагрузки на валу синхронного двигателя от холостого хода до номинальной и кратковременных перегрузках, не превышающих максимального момента, частота вращения двигателя остается постоянной, что является одной из основных особенностей синхронного двигателя. Поэтому зависимость частоты вращения n от момента М на валу (при постоянных частоте f и напряжении U1), называемая механической характеристикой
![]() ,
,
изображается прямой, параллельной оси моментов (рис. 6.3).
При возникновении нагрузок с моментами М>Мm двигатель выпадает из синхронизма. Благодаря наличию на роторе короткозамкнутой обмотки синхронный двигатель пускается как короткозамкнутый асинхронный. Обмотка возбуждения при этом замыкается на сопротивление R≈10Rв, где Rв – сопротивление обмотки возбуждения. При замкнутой накоротко обмотке возбуждения или при возбужденном роторе синхронный двигатель не разгоняется до нужной частоты вращения. По достижении «подсинхронной» частоты вращения (n≈0,95n0) в обмотку возбуждения подается постоянный ток и ротор втягивается в синхронное вращение. При нормальной работе короткозамкнутая обмотка является успокоительной обмоткой, так как препятствует резким изменениям угла .
Второй важной особенностью синхронного двигателя является возможность работы при одной и той же механической нагрузке с различными коэффициентами мощности, как по величине, так и по характеру (индуктивной или емкостной), что достигается за счет изменения тока возбуждения.
Обычно синхронные двигатели выпускаются для работы с опережающим током (cosн=0,8) и поэтому используются, как средство повышения коэффициента мощности участков сетей.
Зависимость тока статора I1 от тока возбуждения Iвс при одних к тех же механических нагрузках Р2 называется V-образными характеристиками синхронного двигателя (рис. 6.4)
![]() при
при
![]() .
.
Если обозначить ток возбуждения, при котором cos=1, Iвс0 то режим при Iвс>Iвс0 называется перевозбуждением двигателя. Ток статора I1 при этом опережает по фазе напряжение U1 и синхронный двигатель является активно-емкостной нагрузкой для сети.
Рис. 6.4 Рис. 6.5
При недовозбуждении (Iвс<Iв0) режим – индуктивный.
Минимальное значение тока I1=I1а на U-образной характеристике при cos=1 определяется нагрузкой на валу и потерями в двигателе.
Рабочими характеристиками синхронного двигателя называются зависимости параметров n, M, P, I1, , cos от мощности Р2 при U1=U1н; f=fн и Iвс=Iвсн (рис. 6.5).
Снятие рабочих характеристик производится путем изменения нагрузки на валу. Для создания нагрузки применяется генератор постоянного тока с независимым возбуждением.
Полезная мощность синхронного двигателя определяется как
![]() , (3)
, (3)
где Р1 – потребляемая двигателем мощность.
Для определения КПД двигателя находится КПД агрегата
![]() , (4)
, (4)
где P2Г=UI – полезная мощность нагрузочного генератора; Г-– КПД генератора; U, I – напряжение и ток генератора.
Полагая ≈Г, получаем
![]() (5)
(5)
Момент синхронного двигателя
![]() (6)
(6)
Коэффициент мощности
![]() (7)
(7)