

1.3 Структура мп устройства.
В основу построения МП систем положено три принципа:
магистральности,
модульности,
микропрограммного управления.
Принцип магистральности определяет характер связей между функциональными блоками системы – все блоки соединяются через единую системную шину. И свойства магистральности и мультиплексируемости обычно реализуются средствами логики "монтажное И" при использовании ИС с выходным каскадом, построенным по схеме с открытым коллектором (стоком), или применением ИС тремя выходными состояниями (рис.). Например, выходы логических элементов микросхемы 74LS00 построены по двухтактной схеме. При такой структуре выходного каскада каждый из уровней формируется путем подключения выхода через низкоомный ключ к линии Vcc или GND соответственно. На Рис. эти ключи изображены в виде обычных переключателей, хотя на самом деле они, разумеется, выполнены на транзисторах.


а) б) в)
Рис. – Типы выходных каскадов: а) – двухтактный; б) – открытый коллектор; в) – с тремя состояниями
Чтобы получить низкие значения времен переходных процессов переключения ИС, емкости всех соединительных проводников и входов других микросхем должны быстро перезаряжаться. Главным образом именно по этой причине в большинстве цифровых микросхем используется двухтактный выход (называемый также выходом с активной подтяжкой – active pull-up). Это обеспечивает перезарядку паразитных емкостей в любом случае через низкое сопротивление открытого ключа, и соответственно минимальное время формирования фронтов 01 и 10. Однако в некоторых ситуациях преимущество имеют выходные каскады других типов. Конфигурация открытый коллектор (или открытый сток), показанная на Рис., б, обеспечивает "жесткий" низкий уровень, при этом состояние высокого уровня соответствует разомкнутой цепи. Напряжение высокого уровня обычно формируется подключением внешнего "подтягивающего" (к напряжению источника питания) резистора либо к линии Vcc, либо к отдельной шине питания. Роль подобного резистора могут выполнять некоторые устройства, такие как реле, лампы накаливания или светодиоды. Выходной транзистор таких каскадов часто имеет большую, чем обычно, нагрузочную способность по напряжению и/или току. Такой каскад обеспечивает формирование размаха выходного напряжения, который может существенно отличаться от напряжения питания ИС. Кроме того, при работе нескольких ИС с активным двухтактным выходным каскадом на общую линию может возникнуть ситуация, когда одна ИС установлена в "1", вторая – в "0", и в этом случае через открытые транзисторы разных плеч будет течь сквозной ток, ограниченный только внутренним сопротивлением источника питания и сопротивлением открытых транзисторов; ИС выходят из строя. В схемах с ОК эта ситуация исключена. Недостаток выходных каскадов с ОК: относительно большое время формирования фронта 01 из-за заряда емкостей через подтягивающий резистор (время формирования фронта 10 остается низким). Каскад с тремя состояниями комбинирует свойства обоих предыдущих решений.
Один из наиболее интересных для практического применения вариантов применения выхода с открытым коллектором показан на Рис. В этой схеме четыре элемента с выходом типа "открытый коллектор" подключены к одному и тому же подтягивающему резистору. Предположим, что на рисунке представлены четыре периферийных устройства, любое из которых может обращаться к микроконтроллеру. Если этот процессор имеет только один вход для внешнего сигнала прерывания, то четыре сигнальные линии от устройств должны быть объединены вместе по схеме монтажное ИЛИ, как показано на рисунке. Когда все сигнальные линии находятся в неактивном состоянии (лог. 0), выходы всех буферных элементов НЕ выключены (ВЫСОКИЙ уровень) и общая линия подтянута к Vcc резистором RL. Если какая-либо из сигнальных линий становится активной (лог. 1), скажем, линия Sig_1, то на выходе соответствующего буфера появляется НИЗКИЙ уровень. В результате, независимо от состояния остальных сигнальных линий, общая линия переключается в состояние НИЗКОГО уровня, прерывая таким образом работу процессора.
Рис. – Управление общей линией через несколько буферов с открытым коллектором
Схемы с тремя выходными состояниями также широко используются при организации магистралей микропроцессорных устройств. При разрешенном выходе логические состояния формируются обычным образом, т.е. выдачей ВЫСОКОГО и НИЗКОГО напряжения. При запрещении выхода он становится разомкнутой цепью, независимо от функционирования внутренней логической схемы и любых изменений на ее входах. В качестве примера использования выхода указанного типа рассмотрим ситуацию, показанную на Рис. В данном случае основному контроллеру требуется прочитать данные с одного из нескольких устройств, подключенных к нему группой общих линий. Поскольку эта шина данных (магистраль) является общим ресурсом, в любой момент времени доступ к шине предоставляется только выбранному устройству. Доступ должен быть закрыт сразу же после считывания данных, с тем, чтобы шиной могло воспользоваться другое устройство. После выбора устройства управление линиями шины будет осуществляться только активными логическими уровнями.

Рис. – Совместное использование шины несколькими устройствами
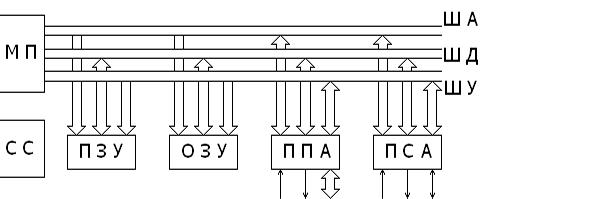
Рис. Реализация принципа магистральности в структуре микропроцессорного устройства

Принцип модульности – система строится на основе ограниченного количества типов конструктивно и функционально законченных модулей.
Принцип микропрограммного управления состоит в возможности выполнения ядром элементарных операций – микрокоманд (сдвиг, пересылка, логические операции и т.д.). Используя комбинации микрокоманд, создают набор команд, максимально соответствующий назначению системы. В секционных МП набор команд можно изменить, используя различные ИС памяти микрокоманд.