

МИНИСТЕРСТВО ОБРАЗОВАНИЯ РФ
Уфимский Государственный Авиационный Технический
Университет
Кафедра АТС
Курсовая работа
по дисциплине:
"Теория автоматизированного управления"
на тему:
«Расчет системы автоматизированного управления
по заданным требованиям»
Выполнил:
Проверил:
Уфа, 2003г.
Задание на курсовую работу
Выдано студенту Исмагилову Наилю Камилевичу
группы АТП –315
Тема работы: Динамический расчет системы автоматического управления по заданным требованиям к качеству ее работы.
Вариант задания: 27-4
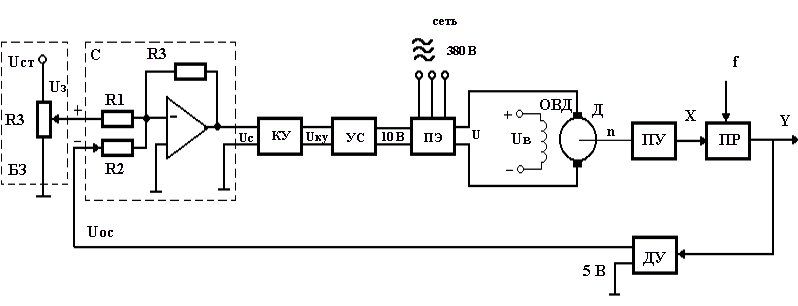
Исходная схема САУ:
Исходные данные к работе:
При точении жаропрочного сплава ХН60ВТ резцом ВК8 с параметрами заточки rв=0.5 мм; ==0; 1=100; =1=450 оптимальная температура 0 составляет 6800С.
tП MAX=1,5мм; tП MIN=1.25мм; Rz=24мкм; TRz = +1мкм;
nн= 4000 об/мин; =74.5 %; RЯ= 0,22 Ом; LЯ = 46 mГн; jН=0,03 кг/м2; Т1=0,092с;
Т2=0,86с; Тду=0с; Тпу=0с.
Требования к системе: =400, L6 дб.
Содержание:
Введение……………………………….………………………………4
Анализ и описание работы САУ………………………………5
Анализ процесса точения….…………………………………..6
Построение структурной схемы САУ………………………..7
Анализ качества нескорректированной САУ………………..9
Синтез САУ……………………………………………………11
Анализ качества скорректированной САУ…………………..13
Анализ качества САР………………………………………….13
Заключение……………………………………………………………15
Список литературы……………………………………………………16
Введение.
Теория автоматического управления и регулирования – наука, которая изучает процессы управления, методы их исследования и основы проектирования автоматических систем, работающих по замкнутому циклу, в любой области техники. Данная САУ должна стабилизировать выходную координату не ниже заданной точности при заданной величине возмущений. Метод анализа и синтеза САУ, примененный в данной работе - это метод с использованием логарифмических частотных характеристик (ЛЧХ) системы. Он является наиболее удобным, благодаря простоте, наглядности и точности, и поэтому используется в данной работе.
1.Анализ и описание работы сау.
По алгоритму функционирования данная САУ является следящей. В ней выходная величина – шероховатость в области точения – регулируется с заданной точностью при изменении напряжения на входе, т.е. система управляет выходной координатой.
На вход системы подается напряжение UЗ, соответствующее заданной температуре в области точения. Это напряжение сравнивается с напряжением UОС поступающим с датчика обратной связи – естественной термопары. Если существует ненулевая разница этих напряжений – ошибка регулирования , то она с соответствующим знаком поступает на корректирующее устройство (КУ), усилитель (У), преобразователь электрический (ПЭ). ПЭ таким образом меняет напряжение на своем выходе, чтобы свести ошибку регулирования - путем изменения скорости вращения двигателя - к минимуму или нулю. Если на систему действуют возмущения, то система с обратной связью будет компенсировать эти возмущения, поддерживая температуру в области резания постоянной.
Функциональная схема состоит из элементов, выполняющих законченную функцию:
П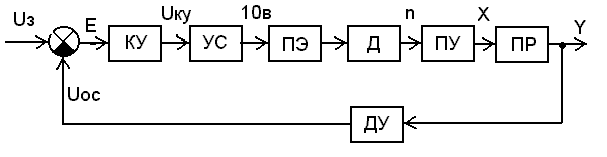 реобразователь
электрической энергии (ПЭ) преобразует
электрическую энергию промышленной
сети трехфазного переменного тока в
электрическую энергию постоянного тока
и регулирует величину выходного
напряженияU,
питающего цепь якоря двигателя Д.
Преобразователь энергии является
линейным звеном. Выходное напряжение
U
равно номинальному значению при
напряжении управления 10 В. С точки зрения
динамики процесса ПЭ представляет собой
апериодическое звено второго порядка
с постоянными времени Т1
и Т2.
реобразователь
электрической энергии (ПЭ) преобразует
электрическую энергию промышленной
сети трехфазного переменного тока в
электрическую энергию постоянного тока
и регулирует величину выходного
напряженияU,
питающего цепь якоря двигателя Д.
Преобразователь энергии является
линейным звеном. Выходное напряжение
U
равно номинальному значению при
напряжении управления 10 В. С точки зрения
динамики процесса ПЭ представляет собой
апериодическое звено второго порядка
с постоянными времени Т1
и Т2.
УС - усилитель, является безынерционным звеном, усиливает напряжение, поступающее от корректирующего устройства.
КУ - корректирующее устройство. Корректирующее устройство корректирует динамические свойства САР. Статический коэффициент передачи КУ равен 1.
БЗ - блок задания, состоящий из источника стабилизированного напряжения и резистора R3, задает напряжение Uз величина которого определяет величину задания выходной координаты САР.
ДУ - измерительная система выходной координаты процесса резания. С точки зрения динамики представляет собой апериодическое звено первого порядка с постоянной времени ТДУ. При номинальном значении выходной координаты выдаёт напряжение Uос=5 В.
С - сумматор на базе операционного усилителя, безынерционное звено с коэффициентом передачи равным 1. суммирование осуществляется по алгоритму Uс=Uз-Uос.
2.Анализ процесса точения.
Анализ процесса резания проведем в несколько этапов:
1.Определение состава выходных координат ПТ, в качестве которых можно взять температуру в зоне точения, параметры стружки, силу резания, уровень шероховатости обработанной поверхности, износ инструмента, скорость резания и др.
2. Выбор выходной координаты, наиболее эффективно действующей на процесс резания. За выходную координату возьмём шероховатость в зоне резания, т.к. ей соответствует качество процесса точения.
3. Математическое описание ОУ: при определении шероховатости в зоне резания учитывают влияние различных факторов.
4. Определение ограничений, в которых должен действовать ПТ. Это ограничение: подача, она может уменьшать входную координату процесса резания.
5. Определение состава управляющих координат(УК). На выходную координату оказывают влияние глубина резания tп и подача S.
6. Выбор управляющей координаты из состава УК, оказывающей наибольшее влияние на выходную координату. Подача эффективнее всего влияет на шероховатость в зоне резания. Поэтому управляющая координата – S.
7. Определение состава возмущений. По условию, на ПР в качестве возмущения действует изменение величины снимаемого припуска в пределах tП MAX-tП MIN.
Учитывая вышесказанное, ПТ в качестве объекта управления можно представить следующим образом:
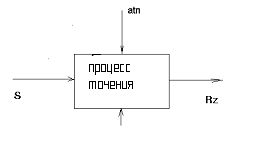
8. Определение диапазона изменения возмущений.
tП изменяется в пределах от 1,25 до 1,5 мм., т.е. ΔtП = 0,25 мм.
9. Определение отклонения выходной координаты при совместном действии возмущений. Зависимость уровня шероховатости от условий ПТ:
Rz=26,45*S^0,37*tп^(-0,18);
Найдём S при tп.ср.= (tп.max+tп.min)/2 = (1,25+1,5)/2 =1,375мм = 1375мкм;
Значит,
S=(Rz/(26,45*tп.ср^(-0,18)))^ 0,37=(24/(26,45*1375^(0,18))^ 0,37=0,9мкм/об;
Шероховатость в зоне точения изменяется в пределах:
Rzmin=26,45*0,9^0,37*1500^(-0,18)=26,45*0,83*0,277=23,653579 мкм;
Rzmax=26,45*0,9^0,37*1250^(-0,18)=26,45*0,83*0,268=24,427 мкм;
Отклонение от 24мкм составляет: 23,65424,427 мкм.
10. Определение диапазона изменения управляющего воздействия.
Изменение выходной координаты двигателя – угловой скорости вращения возможно в пределах 180% от минимального.