

Лабораторная работа2
.doc
Министерство образования и науки РФ
Федеральное агентство по образованию РФ
Пермский государственный технический университет
Кафедра микропроцессорных средств автоматизации
Лабораторная работа №5
Синтез и анализ систем модального управления
Выполнил: Студент гр. БА-03 Широков В.Е.
Проверил:
Казанцев В.П.
Чайковский 2006 г.
Цель работы. Ознакомление с процедурой синтеза непрерывных систем модального управления, с заданием и порядком выполнения лабораторной работы. Синтез модального регулятора и исследование качества синтезированной системы управления в среде Matlab/Simulink.
1. Основные теоретические положения
Синтез систем модального управления базируется на корневых методах, а, следовательно, качество переходных процессов определяется расположением корней характеристического полинома системы на комплексной плоскости. Модальный регулятор относится к полноразмерным (нередуцированным) линейным регуляторам состояния, т. е. для выработки оптимального управления используется информация обо всех координатах управляемого объекта.
Векторно-матричная структурная схема (схема пространства состояния) системы модального управления приведена на рис. 1.
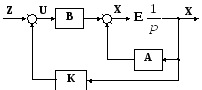
Рис. 1. Структурная схема системы
модального управления
Объект управления (ОУ) представлен в векторно-матричной форме
![]() , (1)
, (1)
а устройство управления (модальный регулятор) представлено в виде
![]() , (2)
, (2)
где Z – вектор задающих
воздействий размерности m![]() 1,
1,
X – вектор состояния
объекта размерности n![]() 1,
1,
K – матрица размерности
m![]() n
искомых постоянных коэффициентов
обратных связей системы по координатам
состояния объекта.
n
искомых постоянных коэффициентов
обратных связей системы по координатам
состояния объекта.
С учетом линейности структур (1) и (2) векторно-матричная модель системы модального управления получает вид:
![]() . (3)
. (3)
Характеристический полином системы определяет ее свободное движение, т. е движение под действием ненулевых начальных условий X(0). Это означает, что свободное движение замкнутой системы определяется только первым слагаемым в (3), т.е. выражением
![]() . (4)
. (4)
Обозначим матрицу свободного движения замкнутой системы в виде
![]() . (5)
. (5)
Характеристический полином системы имеет вид
![]() . (6)
. (6)
Зададимся характеристическим полиномом с желаемым расположением корней на комплексной плоскости в виде полинома с отрицательными действительными корнями, причем все n корней будем полагать равными, что обеспечит оптимальные по быстродействию апериодические переходные процессы в системе. Таким образом, желаемый характеристический полином будет иметь вид
![]() , (7)
, (7)
где T – постоянная времени, определяющая желаемое время регулирования (установления переходных процессов),
![]() . (8)
. (8)
Искомую матрицу K коэффициентов обратных связей получают в результате решения системы уравнений (6) и (7), т.е. приравниванием в этих выражениях коэффициентов при операторе p в одинаковых степенях.
Ход работы
И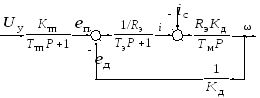 сходная
Схема:
сходная
Схема:
Исходные параметры:
|
№ вар. |
Kтп (о.е.) |
Ттп (с) |
Rэ (Ом) |
Tэ (с) |
Kд (Вс)-1 |
Tм (с) |
Kт (Ом) |
Tт (с) |
Tμт (с) |
iян (А) |
ωн (рад/с) |
tжел (с) |
|
7 |
50 |
0,01 |
2,0 |
0,04 |
0,2 |
0,2 |
0,2 |
0,03 |
0,015 |
20 |
40 |
0,15 |
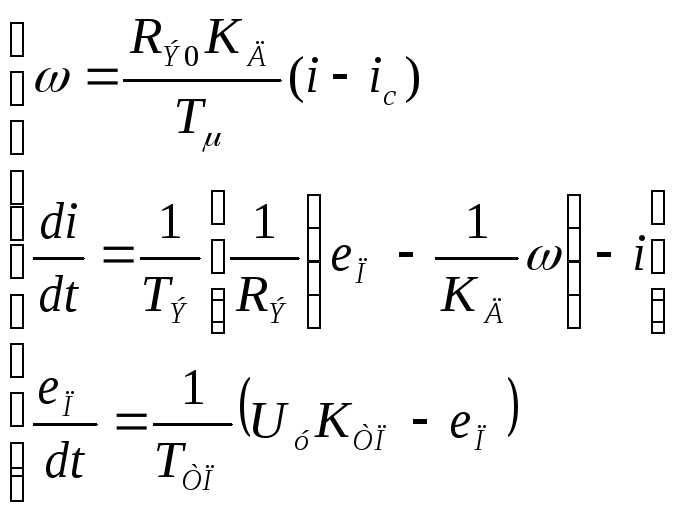
Дифференциальные уравнения, составленные на основе структурной схемы имеет вид:
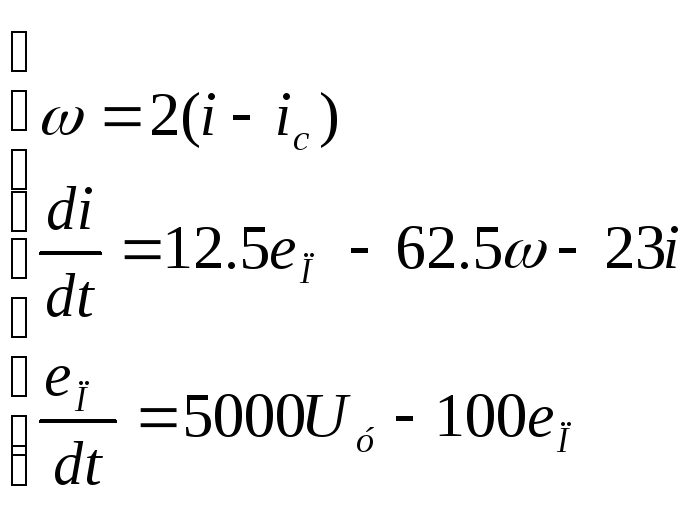
Подставив конкретные значения, получим:
X=[ω,i,eп]T=[x1,x2]
ОУ будет описываться матрицами:
 .
.
Матрица состояния замкнутой системы в соответствии (5)

Характеристический полином замкнутой САУ

Зададимся желаемым временем регулирования tр.жел=0.012c Тогда
![]()
Характеристический полином с желаемым расположением корней
![]()
Приравнивая характеристический полином замкнутой САУ к желаемому, получим
k1=0,875 k2=0.068 k3=0.05
Обратные связи по переменным состояния являются отрицательнымиЮ что следует из выражения (2).
Схема моделирования системы управления представлена на рис .1

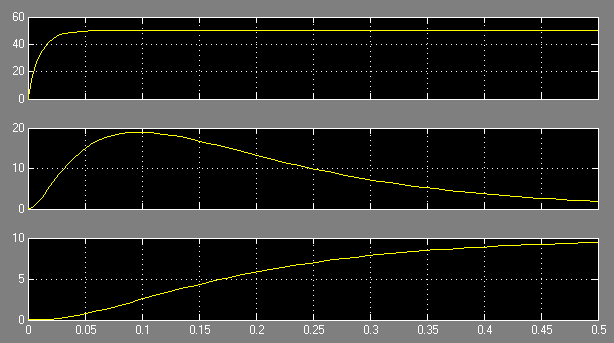
Кривые переходных процессов при ступенчатом приложении задающего воздействия приведены на рис.2, а при ступенчатом приложении единичного тока нагрузки на рис.3

Рис. 2
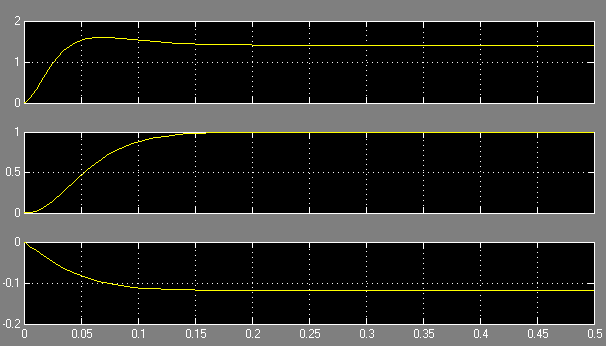
Рис. 3
Верхние графики отражают задающее воздействие, средние – изменение тока нагрузки, нижние – скорости вращения вала двигателя.
Кривые переходных процессов разомкнутой САУ при ступенчатом приложении для единичного задающего воздействия имеют вид:
Для определения коэффициента передачи модального регулятора на основе операционного усилителя по сигналу задания в Simulink модели добавляемого элемента Gain(3) между задающей ступенькой и сумматором. Изменяя его значение добиваемся на выходе значения скорости равно номинальной. Для моего случая коэффициент равен 40.
Определим коэффициенты модального регулятора по сигналам датчиков(обратные связи в модальной системе управления организованы непосредственно по координатам состояния объекта).
K1=Kост+Кдт; Кдт=10/40=0.25; Кост=К1/Кдт=0.875/0,25=3,5
К2=Кocт+Кдс; Кдс=10/40=0.25; Кocт=К2/Кдс=0.068/0.25=0,272
К3=Кocт+Кдс; Кдс=10/40=0.25; Кocт=К3/Кдс=0.005/0.25=0,02
Вывод: Я ознакомился с процедурой синтеза непрерывных систем модального управления, синтезировал модальный регулятор и исследовал качество синтезированной системы управления в среде Matlab/Simulink .