


передати знімок із камери далі (на збереження, обробку тощо) використовується змінна пам’ять. Деякі виробники раніше вмонтовували в камери 3,5 // дисководів, але цей спосіб хоча і найпростіший, все ж не виправдовує себе через високі затрати енергії, та, як наслідок, швидкого розряду батарей живлення. Тому, їм на зміну прийшли пристрої енергозалежної пам’яті: Flash-Memory Card, PCM CIA–Card, крім того майже всі камери мають інтерфейс передачі знімків зі своєї пам’яті в пам’ять комп’ютера (IRDA, USB, COM).
Для збільшення кількості знімків, які можна розмістити в пам’яті камери, дєякі виробники застосовують програмні методи стиснення зображень, серед них найбільш ефективний метод JPEG– стиснення, хоча він призводить до значних втрат якості.
10.3. Будова системи ASCOT
Прооектувння аерофотознімальних робіт являється дуже складним процесом для штурманів аерофотознімання. Маршрути зальоту проектувалися розраховувалися і наносилися графічно на карту, що було надзвичайно трудомістким завданням. Для цього використовувалися графічні засоби.
Завдячуючи GPS, сучасним комп’ютерам та спеціальним програмним забезпеченням, можливо значно полегшити виконання аерофотознімальних робіт, це особливо позитивно впливає на планування польоту, ведення автоматичного показу даних навігації, точне визначення положення літака в реальному часі. Для того, щоб забезпечити користувачів аерофотокамер усіма перевагами управління польоту за допомогою GPS та ідеальним інформаційним потоком на всіх етапах, Leica розробила систему ASCOT для управління і планування робіт, що базується на GPS. Аналіз місії польоту з ASCOT системою є необхідним для різних маршрутів:
•більшість даних у файлі та їх аналіз у програмі електронної
таблиці;
•графічний показ проекта маршруту;
•показ координат носія;
•друк параметрів польоту і перевірка відхилення між запланованою експозицією та фактичним міcцезнаходженням знімання;
•генерація DXF файлів для експорту в будь-який CAD або представлений пакет.
204

ASCOT, має оптимальний інтефейс для обробки. Результати ASCOT-системи відповідають GPS базовим фотограмметричним оцінкам аерофотознімків. GPS-дані і час середньої експозиції можуть бути прочитані в Leica SKI-Aero програмі, яка обчислює високоточно траєкторію літального апарата й інтерполює координати для кожної експозиції камери.
Координати експозиції камери експортують від SKI до PATB/GPS-аерофотоформату. PATB/GPS програма для GPS-основи аерофототріангуляції включає:
файл визначення координат; самоколібровку; великий розмір блоку;
редукцію системних помилок GPS.
ASCOT модуль є основою ASCOT-системи. За допомогою цього модуля оптимізується час польоту, оскільки автоматично приймається і вирішується наступне завдання протягом знімання.
Навігаційна інформація графічно відображається на дисплеї протягом усього періоду зніманння, а саме ведеться показ:
•час перельоту до району знімання;
•час розвороту;
•прямолінійність маршрутів.
Як оператор, так і пілот можуть одночасно вести спостереження за курсом, порівняти його фактичне положення на своїх дисплеях. Курс і напрям заходу може бути вибрано оператором, але якщо потрібно, алгоритм пошуку маршруту вибирає оптимальну траєкторію польоту автоматично.
На протязі знімального польоту, система ASCOT керує аерознімальною камерою інтервалометра. Зміна експозицій, виставляючи інтервал фотографування також може реалізовуватися ASCOT-системою.
Подвійна система камер і гіростабілізуючий пристрій повністю контролюються системою ASCOT, яка зменшує спостереження оператора.
Перед кожним польотом оптимальний інтерфейс усіх компонентів дозволяє повну, автоматичну перевірку системи, вказуючи чи готове ваше апаратне забезпечення. У період польоту за маршрутами відхилення від них, після обробки комплекту GPS з гіростабілізуючим пристроєм відображається на дисплеї оператора.
Початок підготовки даних: GPS накопичує значення координат центрів проекції за всім периметром маршрутів, причому координати
205

центрів проекції записуються на жорсткому диску для більш оперативного і повного анлізу отриманих результатів. Причому, усі дані може бути переписано на гнучкий диск або PCMCIA диски. Окрім цього, у системі ASCOT можливо, за відсутності прямої видимості пунктів (через хмарність), застосовувати автопілот.
Усистемі ASCOT передбачається відображення проектних та дійсних ліній маршрутів. Ці дані на протязі знімання представляють:
•результат GPS спостережень;
•відповідну інформацію для екіпажу носія;
•інформацію про положення гідропристрою;
•позиціювання літака.
Усвою чергу це:
надійність в експлуатації апаратного забезпечення, що експлуатується в екстремальних умовах;
технологічно просте використання графічного комп’ютерного представлення під час складання проекту АФЗ;
значне зменшення часу АФЗ при використанні GPS та програмному забезпеченні;
виконання АФЗ робіт без спеціальної підготовки екіпажу; проведення АФЗ в автоматичному режимі та більш якісний
аналіз зображення;
використання бази даних GPS для корегації координат наземних контрольних точок.
Усі ці компоненти дозволяють виконати АФЗ роботи на високому технічному, технологічному й економічному рівнях.
Система ASCOT базується на використанні сучасного потужного комп’ютера, який відповідає вимогам експлуатації в екстремальних умовах. Вибір комп’ютерних складових та їх розробка велася таким чином, що практично вони не мають впливу ззовні.
Конкретно це відображається у вигляді екранування відповідних шин та інгредієнтів: процесора та екрана на рідких кристалах.
Надійність забезпечення інформації: дані записуються на силіконовий диск із відповідним захистом від електромагнітного випромінювання та турболентними потоками повітря, якщо обладнання встановлене на носіях відкритого типу. Процес обробки даних системою ASCOT показано на рисунку 10.5.
206
|
|
|
Початкові дані з |
|
|
|
Початкові GPS-дані: наземної |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
системи ASCOT |
|
|
|
|
|
|
базової GPS-станції |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обробка даних у |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
пакеті SKI-Aero |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Визначення лінійних |
|
|
|
|
Урахування відстані |
|
|
|
|
Підготовка даних |
|||||
|
|
елеметів ЕЗО в момент |
|
|
|
|
від антени до камери |
|
|
|
|
для ЦФС |
||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
фотографування |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.5.
Комплекс ASCOT має інтерфейси зв’язку, які можуть працювати з двома фотограмметричними камерами, двома гідростабілізуючими пристроями та із зовнішніми GPS. Це реалізовується через послідовний порт RS 232С. Причому, інтерфейсні порти з’єднані з усіма давачами в безпосередній близькості від місця розташування оператора. GPS-приймач забезпечує отримання високоточної навігаційної інформації, а початкові дані накопичуються в комп’ютері системи ASCOT. Необхідно відмітити, що ці засоби дозволяють отримати псевдолінійні виміри з мінімальними шумовими сигнальними перешкодами.
Пристрій може використовуватися в реально часовому виді робіт у вигляді RTCM сигналів, якщо необхідно отримати високоточні виміри. Особливістю системи ASCOT являється те, що на протязі аерофотознімального польоту ця система автоматично контролює GPS-приймач, що дає змогу борт-оператору не акцентувати увагу на процес контролю GPS. Пульт управління блок-оператора складається з терміналу (екрана), на якому висвічуються всі показники давачів з якими працює система ASCOT. Він вмонтований до NSF3 навігаційних сайтів Leica RC30(RC20, RC10A) і дозволяє контроль знімального зальоту з місця оператора.
Дисплей пілота висвітлює графічну інформацію про проходження маршруту, його можливість розташування безпосередньо біля льотчика.
207
2 |
1 |
3 |
|
|
4 5
6
Рис. 10.6.
1.GPS-антена в літаку.
2.ASCOT комп’ютер з GPS-приймачем.
3.Навігаційний пристрій.
4.Дисплей пілота.
5.Аерофотокамера з гідростабілізуючим пристроєм PAV30.
6.Наземна контрольна GPS.
Позитивні риси сиситеми ASCOT.
1.Проектування АФЗ робіт завдяки програмним продуктам та комп’ютерному забезпеченню.
2.Автоматизоване виконання АФЗ у польті.
3.Оптимізація обробки даних.
4.Економічність виконання.
10.4.Цифрові аерознімальні системи
Суттєвим стримувальним фактором у створенні цифрових аерокамер була відсутність сенсорів ( ПЗЗ ) з високою роздільною здатністю [5]. Тільки в 1997-1998 роках передові фірми почали продукувати такі ПЗЗ, і тому стало можливим створити цифрову аерокамеру високої роздільної здатності.
На даний час створено три типи цифрових аерознімальних систем:
ADS40, фірма LH-Systems (Швейцарія);
DMC 2001, фірма Z/I Imaging (Німеччина – США); HRS-A, німецький центр космічних досліджень (DLR).
208
Цифрова аерокамера ADS40 (Airbome Digital Senser) –
продукт співпраці швейцарської фірми LH – Systems та німецького центру DLR (Deutsches Zentrum fur Luftund Rumfahrt).
Компоненти системи: головний сенсор-камера SH40 (оптикоцифровий блок LO64 та інерційна вимірювальна система IMU), обчислювально-управляючий блок CU40, бпок зовнішньої пам’яті для запису зображення ММ40, інтерфейс оператора О140, пульт індикації та управління польотом G140, гідростабілізуюча платформа PAV30.
Принциповим у конструкції камери є те, що тут використовуються ПЗЗ-лінійки (кожна з них довжиною 78 мм, кількість пік селів 12 000), а для формування зображення застосовано принцип електрооптичного сканера.
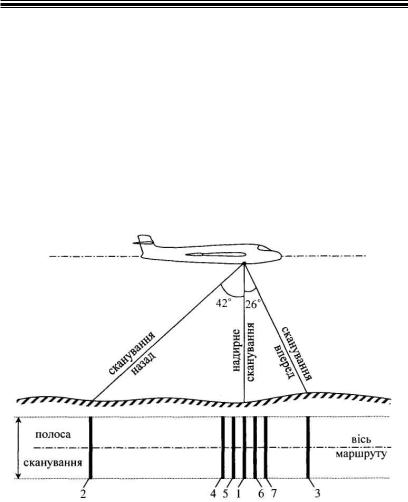
Рис. 10.7. Схема знімання камерою ADS40 з реєстрацією зображення з використанням семи ПЗЗ-лінійок:
1,2, 3 – чорно-біле (монохроматичне) зображення; 4, 5,6 – зображення в трьох кольорах: голубе, зелене, червоне; 7 – зображення в інфрачервоному діапазоні світла.
Зображення в камері одночасно можна зареєструвати сімома сенсорами (рис. 10.7). У надирному напрямі “працюють” ПЗЗлінійки 1, 4, 5, 6, 7, що реєструють монохроматичний образ
209

(спектральний діапазон 465–680 нм), три кольорові образи (голубий 428–492 нм, зелений 533–587 нм, червоний 608–662 нм) та образ в інфрачервоному діапазоні (703–757 нм або 833–887 нм). У на-
прямах вперед (кут 26) лінійкою (3) та назад |
(кут 42) лінійкою (2) |
формуються чорно-білі зображення. Сканування |
впоперек польоту, |
так званий кут зору сканера, становить 64 . |
|
Лінійка, що фіксує монохроматичне |
зображення, має |
12000 пікселів. Щоб збільшити роздільну здатність, поміщають дві однакові, зміщені одна відносно іншої на половину пікселя. Тому, кожний чорно-білий образ фіксується на 24 000 пікселів. Це означає, що за якістю формування такий цифровий образ відповідає роздільній здатності аерофотознімка. Розмір пікселя в напрямі польоту становить 6,5 мкм.
Сканерне зображення суттєво відрізняється від центральної проекції тим, що воно миттєво отримується в межах смуги, перпендикулярної до напряму польоту. Літак переміщається в польоті, і ми отримуємо наступну смугу, а загальне зображення місцевості є безперервним і мовби “склеєне” з окремих смуг. Кожна смуга має ніби свій миттєвий центр проекції, а оскільки літак пересувається, то суцільне зображення є деформованим. Скажімо, прямолінійна в натурі ділянка дороги на зображенні буде викривленою – така є реальна геометрія сканерних зображень. Особливо, це стосується аерозображень і меншою мірою космічного знімання. Для виправлення образу необхідно для кожного миттєвого положення камери (для кожної смуги) знати лінійні та кутові елементи зовнішнього орієнтування. Цю проблему вирішено в такий спосіб: одночасно і синхронно з аерокамерою працюють GPS-приймач та інерціальна система (це вирішення належить фірмі Applanix). Геометричне виправлення здійснюється аналітично і для подальшого використання маємо повноцінне геометричне зображення.
Подамо деякі технічні характеристики камери: фокусна віддаль об’єктива 62,5 мм, відносний отвір 1:4, роздільна здатність об’єктива 150 л/мм, частота сканування смуги 200–800 гц, частота вимірювання елементів орієнтування камери 200 гц, об’єм зовнішньої пам’яті для запису зображення 200–500 GB (гігабайт), що приблизно вистачає на чотири години польоту літака.
Цифрову аерокамеру DMC 2001 (Digital Modular Gamera)
створено фірмою Z/1 Imaging, яка принципово відрізняється від
210
попередньої тим, що в ній використовується ПЗЗ-матриця, а геометричною платформою образу є центральна проекція.
Тут використано принцип багатооб’єктивної знімальної камери. Ідея полягає в тому, що в корпус камери вмонтовано декілька об’єктивів із паралельними головними оптичними осями. У площині прикладної рамки відповідно до об’єктивів розміщаються сенсори. У випадку фотокамер – це була фотоплівка, а у випадку камери DMC – це ПЗЗ-матриці. Об’єктиви виставлені так, що між знімками існуватиме мінімальне взаємне перекриття.
Концепція багатооб’єктивної системи не є новою і була використана у 80-х роках фірмою Carl Zeiss, Iena (НДР) під час створення багатоканальної фотографічної камери МКФ-6 (космічна камера, 6 об’єктивів) та камери МСК-4 (аерофотокамера, 4 об’єктиви). Головна місія використання кількох об’єктивів – це збільшення кута поля зору знімальної системи, тобто з однієї позиції захоплюємо більшу територію.
У камері DMC прийнято модульний підхід формування системи: залежно від вимог користувача можна змінювати кількість об’єктивів та відповідно кількість каналів для реєстрації зображення.
Під час знімання в чорно-білому діапазоні маємо характеристики. Оптична система має об’єктив із фокусною віддаллю 120 мм, відносним отвором 1:4. Цикл роботи знімальної камери – кожних дві секунди один образ. Розмір пікселя становить 6×6 мкм. Використовуючи один об’єктив ПЗЗ-матриця має розміри 7000×4000 елементів, кути поля зору становлять 39×22. Використовуючи два об’єктиви маємо матрицю 500х8000 елементів із кутами 39×42. Використовуючи чотири об’єктиви маємо матрицю 13500×8000 елементів із кутами поля зору 74×44 .
Під час багатоспектрального (кольорового) знімання використовується об’єктив із фокусною відстанню 25 мм та відносним отвором 1:4. Розмір пікселя 12×12 мкм, глибина передачі кольору – 12. При трьох об’єктивах матриця має 3000×4000 пікселів, кут поля зору 72×50. При чотирьох об’єктивах (три для багато спектрального плюс один для інфрачервоного знімання) параметри такі самі, як і в згаданому вище випадку.
Ця камера використовує гідростабілізуючу платформу Т-AS, яка є стандартом для німецьких аерофотокамер типу RMK. Для компенсації спотворення зображення використано електронну систему часової затримки TDI (Time Delayed Integration), яка
211

виконує синхронний із польотом літака зсув зображення по строках ПЗЗ у площині прикладної рамки камери.
Цифрову аерокамеру HRSC було створено в Німецькому центрі космічних досліджень для отримання зображень поверхні Марса. Її модифікація HRSC-A (Higt Resolution Stereo Gamera – Airborn) являється, як видно з назви, стереоскопічною аерокамерою високої роздільної здатності. Базується на принципі електрооптичного сканера з цілою гамою ПЗЗ-лінійок. Як уже зазначалось, ця камера була попередником (у сенсі ідеології) описаної вище камери ADS-40. Тому, принцип функціонування розглядати не будемо.
Камера є вузькокутною, має дев’ять ПЗЗ-лінійок з яких п’ять працюють у чорно-білому діапазоні та чотири – в кольоровому та інфрачервоному. Технічні параметри наступні: фокусна віддаль 175 мм, поле зору в напрямі, перпендикулярному до лінії польоту, кількість пікселів у лінійці 5184, розмір пікселя 7 мкм. Глибина образу становить 10 біт, частота сканування 450 ліній/с. Для гідростабілізації використано установку T-AS, а для визначення елементів зовнішнього орієнтування – систему GPS/INS, тобто фіксацію просторових координат за допомогою GPS та визначення кутів нахилу з використанням інерціальної навігаційної системи.
З1997 року DLR разом із французькою фірмою ISTAR, а потім
зголадською фірмою Geodan Geodesic виконали практичні роботи для виготовлення ортофотокарт та побудови цифрових моделей рельєфу. У літературі подано відомості, що під час висоти польоту
6000 м отримано |
точність визначення планових |
координат 20 см, |
а за висотою – 30 см. Розмір пікселя на місцевості становить 24 см. |
||
Оскільки в |
один часовий момент з одної |
точки отримують |
аж п’ять зображень під різними кутами, то це дозволяє для таких смуг отримувати стереоефект. Для практика-фотограмметриста ця обставина є важливою, бо можна, наприклад, вибрати вигідні умови розглядання вулиць із високою забудовою, що є утрудненим під час використання звичайної стереопари.
Оскільки камера досить добре зарекомендувала себе під час картографування міст, відкритих гірничих розробок, небезпечних районів із повенями, під час інвентаризації телекомунікацій, ліній електропередач тощо, у такому разі заплановано виготовити дві модифікації подібної камери. Це, з одного боку, розширить сферу
застосування, а з |
іншого – підвищить точність |
фотограмметричних |
робіт. Камера |
HRSC-AX вузькокутна, фокусна |
віддаль 150 мм, |
|
212 |
|

п’ять каналів чорно-білих та чотири канали багатоспектральні. Камера HRSC-AXW ширококутна з об’єктивом 47 мм, трьома каналами чорно-білими та двома багато спектральними, ПЗЗ-лінійки матимуть 12 000 елементів, що дозволить будувати просторові моделі міст із точністю 25 см для першого випадку та 50 см для другого.
10.5. Будова цифрової фотограмметричної станції
На перших етапах використання ЦЗ, що було отримано нефотографічними оптико-електронними системами, перетворювались у фотознімки й оброблялись на фотограмметричних приладах. Далі почали розробляти спеціальні цифрові фотограмметричні прилади або цифрові фотограмметричні станції. Їх створення було обумовлене вдосконаленням обчислювальної техніки й успіхами у використанні геоінформаційних систем.
Вона традиційно складається з трьох етапів: підготовчого, польвого і камерального.
Підготовчі роботи виконуються на персональному комп’ютері в камеральних умовах і містять у собі:
формування цифрової репродукції (ЦР) з використанням координат центрів фотографування;
нанесення на ЦР контурів об’єкта, у межах якого будуть виконуватись геодезичні роботи;
складання схеми розташування пунктів геодезичної мережі району робіт за координатами, що були отримані з каталогу, у системі кординат замовника;
вибір і відображення на ЦР зон розпізнавальних знаків. Польові роботи. Використання GPS-приймача, що працює в
навігаційному режимі, дозволяє відслідкувати вихід у необхідну зону. Потім виконують:
•побудова опорної геодезичної мережі з використанням GPSприймачів для трансформування об’єкта в систему координат замовника;
•вибір на місцевості в зоні розпізнавального знака контурної
точки;
•фіксація розпізнавального знака і його ідентифікаційного номера в комп’ютері;
•закріплення розпізнавального знака на місцевості.
213

Камеральні роботи крім передачі результатів польових вимірів у комп’ютер, їх обробки, урівнення і трансформування в місцеву ортогональну систему координат, включають формування каталогу планових координат і висот опознаків у необхідному форматі, запис на магнітні носії результатів для фотограмметричної обробки і подальшого збереження в базі даних.
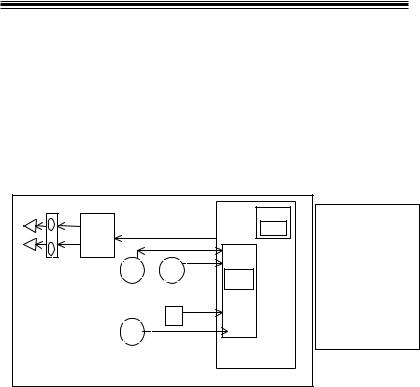
Камеральні роботи виконуються за допомогою ЦФС “Дельта” (на рисунку 10.7 наведено зовнішній вигляд ЦФС “Дельта”, на рисунку 10.8 – блок-схема функціонального комплексу “Дельта”).
У ЦФС “Дельта” використовується пакет програм, який призначений для реалізації проектів робіт зі створення й обробки цифрових карт. Вихідним матеріалом для створення цифрових карт є растрові образи, які отримано шляхом сканування аерознімків, космічних знімків, планів, карт, а також як результат наземного або аерознімання.
Апаратне забезпечення.
ЦФС базується на стандартному Intel-сумісному компьютері із системою Windows 98/NT/2000.
Використовує відеорежими від 1024*768* HiColor до
1600*1200* True Color і вище.
Забеспечує нерухливу марку під час рухливих знімків, не використовуючи для цього спеціальної апаратної підтримки.
Переміщення по знімку виконується за допомогою класичної комбінації рухів ручних штурвалів і ножного диску або мишкою.
Для стереоспостереження використовують затворні окуляри або стереоскоп.
Пакет програм містить програми Models.exe і Ged.exe. Коли запускається Models.exe з’являється основна панель інструментів, натисніть на відповідну кнопку на панелі інструментів, щоб ввійти в
один із основних розділів пакета.
•Розділ формування файла, опис фотокамери, що були використані для отримання знімків, які обробляються в пакеті.
•Розділ формування файла опорних точок для проекту.
•Розділ формування файла загального опису проекту.
•Розділ збору даних для згущення мережі.
•Розділ внутрішнього орієнтування знімків.
•Розділ зовнішнього орієнтування растрового образу.
•Програма створення й обробки цифрових карт.
214

Для формування й оновлення цифрових карт необхідно за допомогою растрових образів і додаткових даних створити цифрову модель місцевості.
Для створення цифрової моделі місцевості необхідно виконати
етапи.
1.Визначення даних знімальної камери.
2.Визначення опорних точок для орієнтування растрового образу. Особливу увагу треба звернути на порядок координат Х і Y. Для орієнтування використовують точки в системі Гауса-Крюгера.
3.Виконати внутрішнє орієнтування растрового образу.
4.Для стереопари виконати взаємне орієнтування знімків.
5.Виконати зовнішнє орієнтування цифрової моделі.
Програма орієнтування.
1.Забезпечує створення каталогів опорних точок і списку камер.
2.Напівавтоматичне орієнтування стереопари й поодинокого
знімка.
3.Повний контроль похибок і можливість корекції на кожній стадії орієнтування.
Программа стереоскладання і створення електронних карт.
1.Працює, як у стереорежимі, так і з поодиноким знімком, використовуючи існуючу цифрову модель рельєфу (ЦМР).
2.Дозволяє виконувати векторизацію ортофотопланів або відсканованих карт.
3.Трьохмірне накладання векторної інформації на растрову.
4.Налагоджування шарів, символів, параметрів об’єктів та інших атрибутів карт.
5.Використання автоматичної добудови полігонів.
6.Автоматичне і напівавтоматичне відтворення рельєфу, побудова й інтерполяція горизонталей.
7.Дозволяє використовувати відскановані карти й поодинокі знімки у форматах TIFF і BMP.
8.Працює з чорно-білими і кольоровими растрами розміром до 4 Гб на звичайному компьютері.
9.Підтримує формати DXF+DBF, VID/MIF,ASCII.
Функції для роботи з рельєфом.
1.Створення регулярної ЦМР-сітки з пікетів або горизонталей.
2.Моделювання горизонталей.
3.Інтерполяція горизонталей.
4.Присвоєння висоти всім об’єктам карти за пікетами або горизонталями.
215
5.Розрізи, січення, підрахунок об’ємів.
6.Автоматична тріангуляція.
7.Використовує метод швидкої кореляції для автоматичного ототожнення та передачі точок.
8.Повний контроль із кореляції похибок паралаксів на зв′язуючих точках.
9.Електронне маркування виміряних точок і генерація абрисів.
10.Автоматичний і напівавтоматичний режим вимірювань.
11.Фільтрація виміряних точок за різними критеріями.
12.Видача результатів вимірів у форматах фотоблок,фотоком і в текстовому вигляді.
|
|
|
|
|
Г-очіфотограмметриста. |
|
М |
|
|
СА |
лш-лівийручнийштурвал |
|
|
|
СС-стереоскоп |
||
|
|
|
|
|
пш-правийручнийштурвал |
Г |
СС |
лш |
нш |
|
М-монітор |
КОУ |
нш-ножний штурвал |
||||
|
|
|
|
ПЕОМ-персональний |
|
|
|
|
|
|
компьютер |
|
|
|
бп |
|
бп-блок педалей |
|
|
|
|
СА2-мережевийадаптер |
|
|
|
пш |
|
|
КОУ-контролер |
|
|
|
|
ПЕВМ |
керуючих пристроїв |
|
|
|
|
|
|
|
|
|
Рис. 10.7. |
|
|
Програмне забезпечення.
Програмне забезпечення є серцевиною технології цифрової фотограмметрії. Чим розгалуженішим воно є, тим більш технологічні властивості має цифрова фотограмметрична станція.
ЦФС дає змогу реалізувати процеси:
•створення топографічних карт та планів;
•побудова мереж фототріангуляції;
•побудова ЦМР;
•створення цифрових карт та ортофотопланів. Стереоскладання блоку виконується при запуску програм
Models.exe, Ged.exe. Обробку знімків виконують за допомогою програми Models.exe, після запуску якої з’являється основна панель інструментів (рис. 10.8.).
216

Рис. 10.8.
Ця панель містить розділи:
формування файла з вихідними даними; формування файла опорних точок; збору даних для згущення мережі; орієнтування знімків; створення й обробка цифрових карт.
Технологічні процеси складаються:
•підготовчі роботи;
•процес внутрішнього орієнтування;
•процес взаємного орієнтування;
•процес зовнішнього орієнтування;
•процес створення ЦМР.
Підготовчі роботи включають підготовку вихідних даних та файла опорних точок для стереопари. Таким чином підпрограма “Камера” передбачає ввід таких елементів (рис. 10.9):
назва камери; фокусна відстань ( f );
планові елементи внутрішнього орієнтування ( x0 , y0 ); еталонні відстані між координатними мітками ( lx , ly ); координати координатних міток (не менше чотирьох); базис фотографування в масштабі знімка ( bx ); значення дисторсії (при необхідності).
217
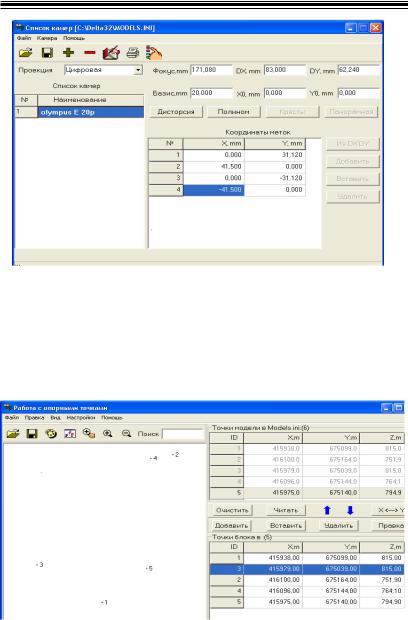
Рис. 10.9.
У підпрограмі “Опора” вводяться координати опорних точок (X,Y,Z), які потім вибираються для окремих стереопар мережі (рис. 10.10). Умовою вводу координат точок є те, що точки необхідно вносити в тому порядку, в якому вони будуть вимірятись на знімку, при чому, спочатку вибирають точки по краях стереопари, а потім решта точок.
Рис. 10.10.
218

Після підготовчих робіт виконують процес внутрішнього орієнтування та взаємного орієнтування (“Внутреннее ориентиро-
вание” та “Взаимное ориентирование”).
Процес внутрішнього орієнтування полягає в наведенні спостерігаючої марки на координатні мітки або на центральний хрест.
Процес взаємного орієнтування полягає в послідовному знищенні поперечних та повздовжніх паралаксів на 6 або 12 стандартно розташованих точках (рис.10.11).
1 |
4 |
1 (7) |
4 (10) |
|
|
||
2 |
5 |
2 (8) |
5 (11) |
|
|
||
3 |
6 |
3 (9) |
6 (12) |
Рис. 10.11.
У ЦФС “Дельта” є така властивість, що програма сама наводить оператора в район необхідної точки, після чого необхідно лише насадити стереоскопічно марку на точку. Після закінчення процесу висвітлюється таблиця залишкових поперечних паралаксів на точках орієнтування. Точність орієнтування складає 5 мкм.
Далі виконують процес зовнішнього орієнтування моделі – “Внешнее ориентирование” (оскільки після знищення паралаксів отримано стереоскопічну модель), який полягає в наведенні марок на опорні точки (рис.10.12). При чому, програма сама наводить марку в район опорної точки в тому порядку, який було задано у вікні “Опора”.
Тому, для більш ефективної роботи необхідно достатньо правильно організувати роботу ще на початковій стадії. Після цього висвітлюється таблиця точності абсолютного орієнтування.
219

Рис. 10.12.
Програма стереоскопічного збору – “Сбор” – дозволяє створювати та регіструвати цифрову модель місцевості за растровими зображеннями у вигляді послідовних точок з трьома геодезичними координатами. Точки реєструються з кроком розміром 1 мм у масштабі плану. Цифрові дані збираються та реєструються за вибраними класами.
Після вимірювання виконується оцінка точності стереопари. Програму редагування цифрової інформації призначено для
формування планшетного листа карти з підписами та умовними позначеннями, а також оперативне отримання інформації про будьякий об’єкт. Цифрова фотограмметрична станція має програмне забезпечення з інвентаризаіції земель та створення ортофотопланів [27].
Основні функції стереоскладання та створення електронних
карт:
працює в стереорежимі і з поодинокими знімками, використовуючи існуючу цифрову модель рельєфу (ЦМР);
дозволяє виконувати векторизацію ортофотопланів та відсканованих карт;
трьохвимірне накладання векторної інформації на растрову; налагоджування шарів, символів, параметрів об’єктів та інші
атрибути карт; використання автоматичної добудови полігонів;
220
автоматичне і напівавтоматичне відтворення рельєфу, побудова й інтерполяція горизонталей;
дозволяє використовувати відскановані карти і поодинокі знімки у форматах TIF та BMP;
працює з чорно-білими та кольоровими растрами розміром до 4 Гб на звичайному комп’ютері;
підтримує формати DXF+DBF, VID/MIF, ASCII.
Функції для роботи з рельєфом:
•створення регулярної ЦМР – сітки з пікетів або горизонталей;
•моделювання горизонталей;
•інтерполяція горизонталей;
•присвоєння висоти всім об’єктам карти за пікетами або горизонталями;
•розрізи, січення та підрахунок об’ємів;
•автоматична тріангуляція.
Програма використовує метод швидкої кореляції для автоматичного ототожнення і передачі точок.
Збір даних.
Збір інформації проводимо після створення стереоскопічної моделі, тобто після процесів взаємного та зовнішнього орієнтування. Програма дозволяє виконувати збір векторної інформації за растровими зображеннями (ручна векторизація). Збір за знімками можливий як у стереорежимі, так і в монорежимі (з використанням одного знімка).
Збір даних – це векторизація даних із растрових джерел у векторну форму.
Послідовність виконання робіт:
1.Орієнтування знімків, за якими буде виконуватись збір даних.
2.Створення нової карти командами Файл/Создать.
3.Відкриття растрового файлу (у моночи стереорежимі)
командами Растр/Открыть.
4.Створення шарів збору даних за допомогою “Менеджера
слоёв”.
5.Перехід у режим Capture, який включає режим збору даних. Вибір біжучих шарів у випливаючому вікні “Активный шар”.
6.Вибір шаблона об’єкта і виконання збору даних за цими шаблонами.
7.Перехід на закладку Edit для виходу з режиму збору даних. Кожен об’єкт карти належить до певного шару, який являється
основною характеристикою об’єкта – він показує, якої природи цей
221

об’єкт і як виводити цей об’єкт на карту. Шар має ім’я, ідентифікатор, атрибути лінії, заливки і стану, які керують видимістю, поміткою та редагуванням об’єктів, умовним знаком.
Переважно використовуються шари: горизонталі основні, контур, льодовики/сніг, пікети, горизонталі основні по грунту/потовщені, обриви.
Після створення шарів і вибору одного з них починають оцифровувати растрове зображення. Наше завдання полягало в наборі пікетів та рисованні горизонталей.
За допомогою команди Авторегистрация проводили збір плавних ліній (горизонталей) (рис.10.13). Після включення цього режиму наводили марку на початок горизонталі, нажимали ліву клавішу миші або педаль регістрації, а потім переміщали на карті вздовж контура. При цьому, точки об’єкта автоматично розміщаються на карті вздовж траекторії руху на відстані 1 мм у масштабі карти. Після закінчення оцифровування горизонталі натискали F5 для запам’ятовування. Програма автоматично будує горизонталі в зоні, що буде охоплена сіткою висот.
Рис. 10.13.
Далі проводили згладжування горизонталей – у головному меню команди Правка/Сглаживание або комбінація клавіш Ctrl+S, а також виконували інтерполяцію горизонталей.
Таким чином, було нанесено всю інформацію на карту. Для перегляду оцифрованої карти необхідно забрати растрове зображення – Растр/Спрятать. У результаті отримали цифрову карту з нанесеною інформацією та горизонталями.
Технологія опрацювання наземних цифрових знімків для створення топографічного плану на ЦФС “Дельта”.
1.Запуск програмного пакету MODELS.exe.
2.Встановлення параметрів камери у вікні “Камера”.
222