

Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное
образовательное учреждение
высшего профессионального образования
Алтайский государственный технический университет
им. И. И. Ползунова
Кафедра теоретической механики и механики машин
Курсовой проект защищен с оценкой
___________________________
Руководитель
проекта___________доцент А.П.Андросов
УДК 666.777.97дителя)
Исследование механизмов насоса с вращающейся кулисой пояснительная записка к курсовому проекту
(по дисциплине Теория механизмов и машин)
КП 150204 26 001 ПЗ
Проект выполнил
студент гр. СП-01 Дудкин А.С.
Нормоконтролер доцент А.П. Андросов
Барнаул 2013
Задание
Устройство предназначено для перемещения деталей в горизонтальном направлении. Основной механизм (рисунок 1) состоит из кривошипа 1, кулисы-шатуна 2, кулисного камня-коромысла 3, ползуна 4 и ползуна-кулисы 5.
Кривошип получает вращение от электродвигателя через планетарный редуктор и пару зубчатых колес а и б (рисунок 2).
Диаграмма сил сопротивления, приложенных к ползуну, показана на рисунке 3.
П
![]()
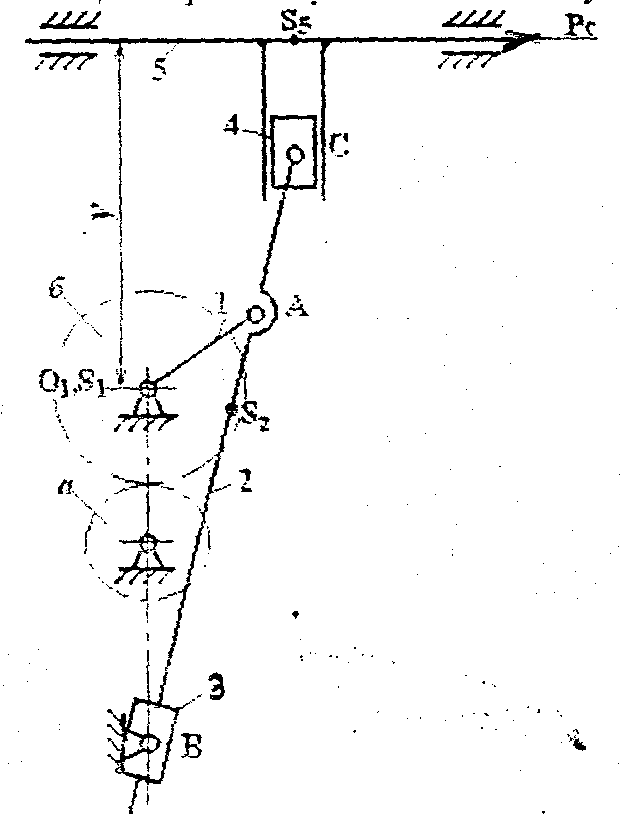
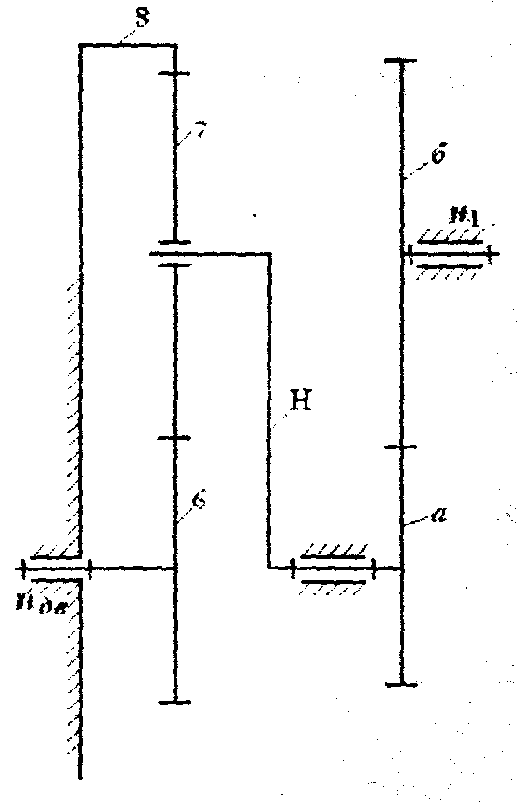

Рисунок 1 - Схема основного механизма Рисунок 2 - Схема планетарного редуктора


![]()
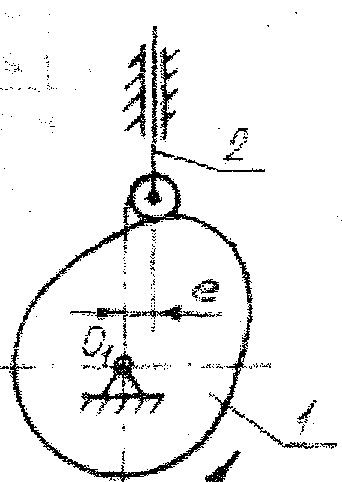
Рисунок 3 – Диаграмма усилий на ползуне. Рисунок 4 – Схема кулачкового механизма
Таблица 1.Задание
Наименование
параметра Размерность Значение Коэффициент
измерения средней скорости,
1,3 lO1В
м 0,32
0,26
У
lАС 0,15 lАS2 0.09 Частота
вращения кривошипа, n1
об/мин
170 Частота
вращения ротора электродвигателя,
nдв
об/мин
950
Массы
звеньев m1
кг 8 m2 12 m5 17 Моменты
инерции звеньев IS1
кг·м2 0,3 IS2
IS2
= m2 где Сила
сопротивления при рабочем ходе, Pр-x
Н
4500 Сила
сопротивления при холостом ходе,
Px-x 300 Номер
положения для силового расчета
6 Число зубьев
колес
Za Zb
14
26 Модуль
колес aиbи планетарного механизма,m
мм
6 Число
сателитов
3 Приведенный
к кривошипу момент инерции масс
зубчатого механизма и ротора
электродвигателя, I
кг·м2
0.5 Коэффициент
неравномерности, δ
0.01
![]()
![]() ,
,![]() = 0,2
= 0,2![]()
 Продолжение
таблицы 1
Продолжение
таблицы 1
-
Ход толкателя, h
м
0,04
Фазовый угол удаления
градус
150
Фазовый угол сближения
80
Фазовый угол дальнего выстоя
70
Максимальный угол давления на участке удаления,

15
Максимальный угол давления на участке сближения,

45
Направление вращения кулачка
по часовой стрелке
Закон движения толкателя на участке удаления

Закон движения толкателя на участке сближения
