

Вопрос №54 2014
.docxКорректируемые гироскопические курсоуказатели:
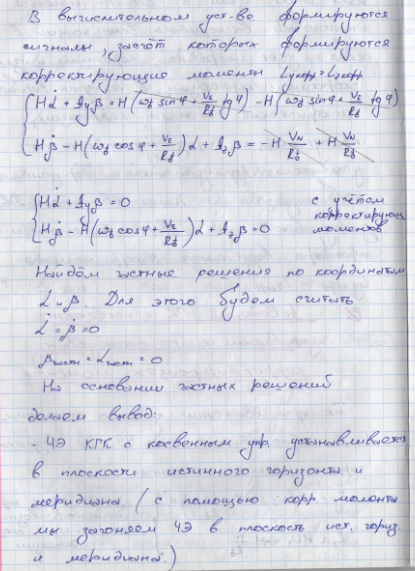
Это ГК с косвенным управлением, где гироскоп никак не связан с маятником. Маятниковость создается дистанционно . Корректируемые ГК делятся на:
- КГК с непосредственным управлением
- КГК с косвенным управлением
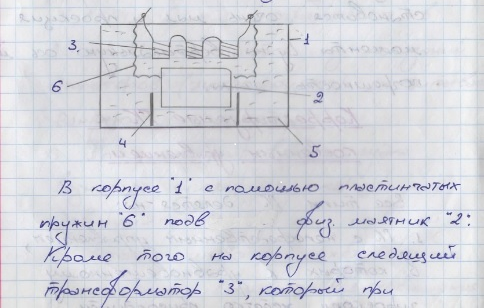
В корректируемом гирокомпасе в качестве физического маятника используется акселерометр или ИГ (индикатор горизонта).
Режим гироазимута:
Варианты использования этого режима:
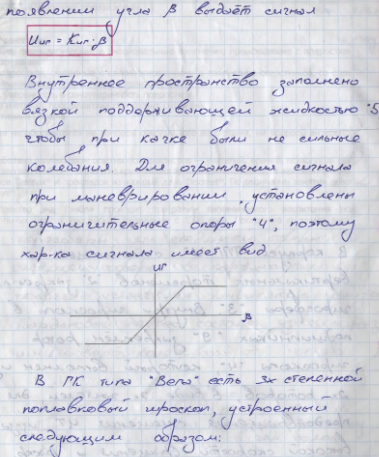
Корректируемый гирокомпас в основном режиме управляется от индикатора горизонта. При маневрировании, особенно в высоких широтах и на больших скоростях, сигнал от ИГ будет иметь ошибку, вызываемую действием сил инерции на индикатор горизонта. В результате этого у гирокомпаса при маневрировании появляется инерционная девиация. Для уменьшения инерционной девиации в ГК «Вега» приняты следующие конструктивные меры.
1. Сделаны упоры (с регулировкой), ограничивающие угол отклонения маятника ИГ (не более ± 1°). Отклонение маятника на 1гр соответствует ускорению 0,33 уз/с. При любом большем ускорении сигнал, снимаемый с ИГ, не превышает номинала.
2. Маятник ИГ сильно задемпфирован вязкой жидкостью, поэтому он практически не реагирует на кратковременные ускорения при резком маневре.
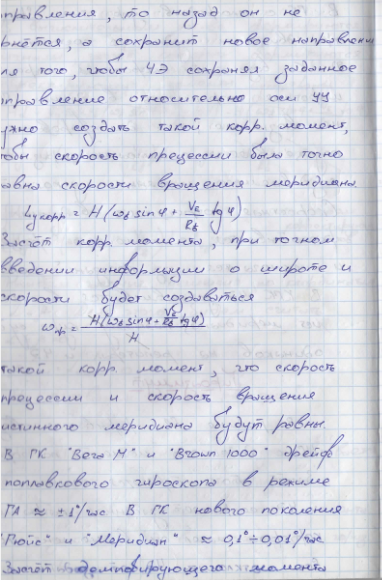
3. Период собственных колебаний ГК «Вега» по сравнению с ГК «Курс» увеличен в 2 раза. Это снижает погрешность при маневрировании также примерно в 2 раза. Несмотря на принятые конструктивные меры, у ГК «Вега» при маневрировании все же возникает инерционная девиация. Для предотвращения ее появления предусмотрен второй режим работы прибора — режим гироазимута. В этом режиме из схемы управления исключается сигнал ИГ, создающий «маятниковый» момент
Для перехода в режим гироазимута в схеме имеется переключатель. В режиме гироазимута чувствительный элемент (гиросфера) не обладает направляющим моментом, так как нет связи с ИГ, прибор становится нечувствительным к ускорениям при маневрировании и у него не появляется инерционная девиация. Но отсутствие направляющего момента вызывает непрерывный дрейф гиросферы, поэтому долго пользоваться таким курсоуказателем нельзя — у него накапливается все увеличивающаяся погрешность.
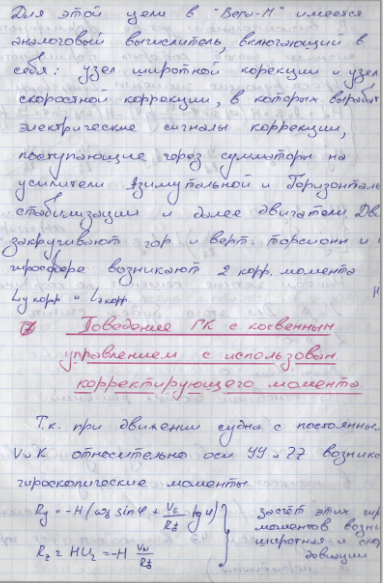
Погрешность ГК в режиме гироазимута:
В режиме гироазимута — это дрейф гиросферы, т. е. ошибка, непрерывно увеличивается со временем. Для уменьшения ошибок в схему коррекции вводятся дополнительные электрические сигналы с помощью переменного резистора «Дрейф» (расположенного в основном приборе ВГ-1). Этим сигналом создается дополнительная закрутка горизонтальных и вертикальных торсионов на углы фу и фz, т. е. вводятся дополнительные моменты, которые вызывают прецессию гиросферы по азимуту и горизонту в сторону уменьшения погрешностей. Регулятор «Дрейф» вырабатывает сигнал U6 который обеспечивает дополнительную закрутку горизонтальных торсионов на угол фу, т. е. создает дополнительный момент Lудоп = Суфу. При этом уменьшается дрейф гиросферы в режиме гироазимут. Первоначальную установку регулятора «Дрейф» выполняют в режиме гироазимута, добиваясь минимальной скорости увода гиросферы (не более 1 град/ч).