

15. Магнитные поля и эдс асинхронной машины
Основные уравнения асинхронной машины.
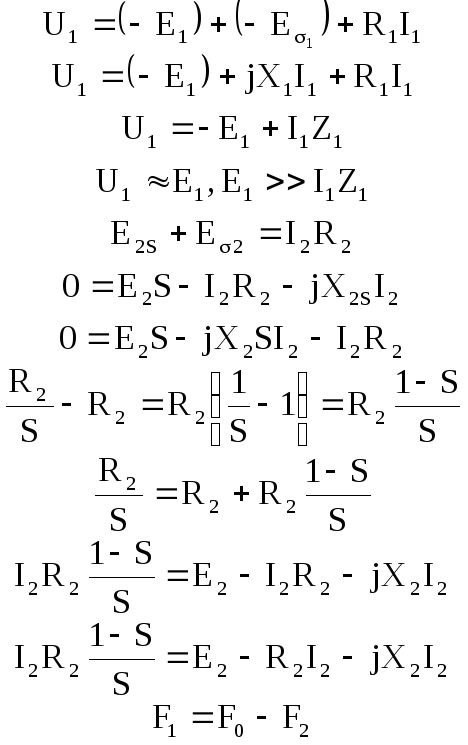
Векторная диаграмма асинхронного двигателя.
Используя принципы построения векторной диаграммы для трансформатора, построим ее для асинхронного двигателя.
Вначале во втором основном уравнении величину r2' представим в виде:
![]() ,
,
что математически не противоречит друг другу.
Тогда само уравнение можно переписать:
![]()
Используя три основных уравнения двигателя, построим векторную диаграмму, которая, будет несколько напоминать диаграмму трансформатора (рис. 5.7.1).
Вторичное напряжение определяется вектором:
![]() ,
,
иначе говоря, асинхронный двигатель в электрическом отношении работает как трансформатор при активной нагрузке.
Мощность, отдаваемая вторичной обмоткой данного трансформатора
![]() ,
,
представляет собой полную механическую мощность, развиваемую двигателем.
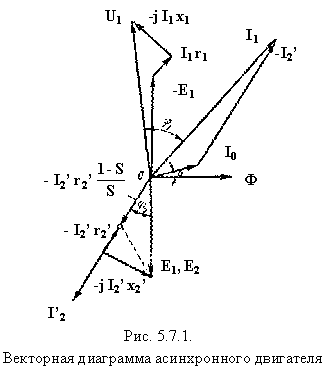
Электромагнитный момент асинхронного двигателя.
Вращающий момент в асинхронном двигателе создается взаимодействием тока ротора с магнитным полем машины. Вращающий момент математически можно выразить через электромагнитную мощность машины:
![]() ,
,
где w1=2pn1/60 - угловая частота вращения поля.
В свою очередь, n1=f160/Р, тогда
![]() .
.
Подставим в формулу M1 выражение Рэм=Рэ2/S и, разделив на 9,81, получим:
 ,
,
Отсюда следует, что момент двигателя пропорционален электрическим потерям в роторе. Подставим в последнюю формулу значение тока I2’:
 ,
,
получим
 ,
,
где U1 - фазное напряжение обмотки статора.
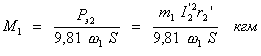
Механические характеристики асинхронного двигателя.
В последнем выражении для M1 единственным переменным параметром является скольжение S. Зависимость М=f(S) получило название механической характеристики двигателя (рис. 5.11.1).
В момент пуска двигателя, когда n2=0,
скольжение S=1, тогда:
 .
.
Под действием момента Mn ротор придет во вращение. В дальнейшем скольжение будет уменьшаться, а вращающий момент увеличиваться. При скольжении Sкр он достигает максимального значения Mmax.. Величина критического скольжения
![]() .
.
Тогда, подставив его значение в формулу для М, получим:
 .
.
Дальнейший разгон двигателя будет сопровождаться уменьшением скольжения и, вместе с тем уменьшением вращающего момента. Равновесие наступит, когда величине вращающего момента будет противостоять тормозной момент, вызванный нагрузкой.
При номинальной нагрузке будут номинальный вращающий момент Мн и номинальное скольжение Sн.
Отношение максимального момента к номинальному называется перегрузочной способностью двигателя.
![]() .
.
Обычно она составляет величину от 1,7 до 2,5.
Отношение пускового момента к номинальному называется кратностью пускового момента
![]() .
.
Эта величина может быть меньше единицы (например, 0,8) и больше ее (до 1,2). При меньшей кратности двигатель следует включать в работу без нагрузки, и лишь после разгона подается нагрузка. Двигатель с кратностью Кп.м.>1 можно включать в сеть с полной нагрузкой.
Регулирование частоты вращения асинхронного двигателя.
Регулирование частоты вращения асинхронного двигателя определяется формулой:
![]() .
.
Здесь возможны три различных способа реализации:
Первый заключается в изменении частоты тока f, подаваемого в обмотки двигателя. Этот способ позволяет осуществлять плавное регулирование частоты вращения двигателя. Регуляторы частоты тока пока еще очень дороги, поэтому они мало применяются.
Второй способ связан с изменением пар полюсов p на статоре.
Укладывая на статоре несколько обмоток, рассчитанных на различные числа пар полюсов (р=1,2,3,4), можно обеспечить различные частоты вращения магнитного поля (соответственно: 3000, 1500, 1000, 750 об/мин). Подключение к сети необходимой обмотки производится специальным переключателем.
Этот способ регулирования ступенчатый, но в ряде металлообрабатывающих станков он нашел самое широкое применение (например, для привода продольно-строгального станка при рабочем и обратном ходе).
Третий способ регулирования частоты вращения возможен лишь для двигателей с фазным ротором. Здесь изменение скольжения S достигается введением в цепь ротора регулировочных сопротивлений. Такие схемы широко используются на грузоподъемных кранах.
Области применения и устройство машин постоянного тока.
Машины постоянного тока используют в качестве генераторов и двигателей.
Электрическая энергия постоянного тока, вырабатываемая генераторами, служит для питания двигателей постоянного тока, электролитических ванн, электромагнитов различного назначения, аппаратуры управления и контроля и т. д. В настоящее время генераторы постоянного тока во многих установках заменяют полупроводниковыми преобразователями переменного тока в постоянный.
Двигатели постоянного тока применяют на транспорте для привода некоторых металлорежущих станков, прокатных станов, подъемно-транспортных машин, экскаваторов и т. д. Одной из главнейших причин применения двигателей постоянного тока вместо наиболее широко распространенных асинхронных двигателей (см. гл. 10) является возможность плавного регулирования частоты вращения в широком диапазоне и получения желаемых механических характеристик n(М).
Рис. 9 1. Устройство (а) и якорь (б) машины постоянного тока
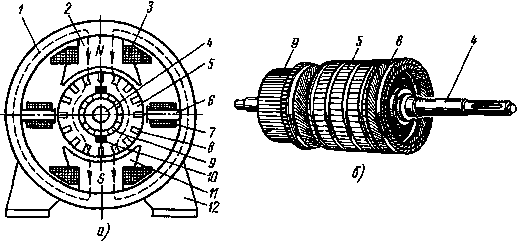
Генераторы и двигатели постоянного тока устроены одинаково. Неподвижная часть машины, называемая статором (рис. 9.1, а), состоит из массивного стального корпуса 1, к которому прикреплены главные полюсы 2 и дополнительные полюсы 6. Исходя из технологических и других соображений главные полюсы изготовляют чаще из отдельных стальных листов; иногда их изготовляют сплошными. Из отдельных листов либо сплошными изготовляют и дополнительные полюсы. Перечисленные детали статора являются также и деталями его магнитопровода. На главных полюсах размещают катушки одной или нескольких обмоток возбуждения 3, на дополнительных полюсах — катушки 7 обмотки дополнительных полюсов.
В подшипниковых щитах, прикрепленных с торцевых сторон к корпусу, расположены подшипники, несущие вал 4 вращающейся части машины, называемой якорем (рис. 9.1, а и б). На валу закреплен цилиндрический сердечник якоря 5, который для уменьшения потерь мощности от перемагничивания и вихревых токов набирают из стальных листов. В пазах, расположенных по поверхности якоря, уложена обмотка якоря 8. Так же, как обмотку возбуждения и обмотку дополнительных полюсов, ее изготовляют из медного изолированного провода. Выводы от обмотки якоря присоединяют к расположенному на валу коллектору 9. Последний представляет собой цилиндр, состоящий из медных пластин, изолированных друг от друга и от вала. К коллектору с помощью пружин прижимаются графитные, угольно-графитные или металлографитные щетки 10. Щетки расположены в специальных щеткодержателях.
Обмотка возбуждения машины питается постоянным током и служит для создания основного магнитного поля, показанного на рис 9.1, а условно с помощью двух линий магнитной индукции, изображенных пунктиром.
Главные полюсы имеют полюсные наконечники 11, служащие для получения по большей части окружности якоря одного и того же воздушного зазора между сердечником якоря и главными полюсами. Это необходимо для получения на большей части окружности якоря одной и той же магнитной индукции, а в проводниках обмотки якоря — постоянной по значению ЭДС. Дополнительные полюсы предназначены для уменьшения искрения под щетками .
С помощью коллектора и щеток вращающаяся обмотка якоря соединяется с внешней электрической цепью. О других важных назначениях коллектора и щеток будет говориться в.
На рис. 9.1, а показана машина постоянного тока с двумя главными полюсами. В зависимости от мощности и напряжения машины могут иметь и большее число полюсов. При этом соответственно увеличиваются число комплектов щеток и дополнительных полюсов. Крепление машины к фундаменту, специальным салазкам или металлоконструкции осуществляется с помощью лап 12. Корпус некоторых машин снабжается для крепления специальными фланцами.
Принцип действия машин постоянного тока.
Принцип действия генератора. Допустим, что якорь машины (см. рис. 9.5) вращается с помощью какого-то двигателя в направлении, указанном стрелкой. Если щетки генератора соединить с каким-либо приемником r, то под действием ЭДС генератора в обмотке якоря и приемника появится ток, приемник начнет потреблять электрическую энергию, а машина будет ее отдавать, т. е. будет работать в качестве генератора. Естественно, что электрическая энергия, вырабатываемая генератором, преобразуется из механической энергии двигателя, вращающего якорь генератора.
Направление тока в проводниках обмотки якоря генератора совпадает, конечно, с направлением ЭДС проводников и при вращении якоря изменяется. Однако с помощью коллектора изменяющийся по направлению ток проводников преобразуется в неизменные по направлению токи параллельных ветвей iпар и ток внешней цепи iя, называемый током якоря. Согласно первому закону Кирхгофа для рассматриваемого генератора iя = 2iпар. Машины постоянного тока могут иметь число параллельных ветвей больше двух. Обозначив в общем случае число параллельных ветвей 2а, получим
(9.3)
iя = 2аiпар .
Если воспользоваться правилом левой руки, нетрудно установить, что генератор развивает электромагнитный момент, направленный против направления вращения, т. е. является тормозящим.
Изменение полярности щеток и, следовательно, направлений ЭДС, напряжения и тока во внешней цепи генератора возможно произвести одним из двух способов:
1) изменением направления магнитного поля главных полюсов, что осуществляется изменением направления тока обмотки возбуждения, располагаемой на главных полюсах;
2) изменением направления вращения якоря генератора с помощью приводного двигателя.
Обычно используется первый способ.
Принцип действия двигателя. Предположим, что якорь той же машины (см. рис. 9.5) неподвижен. Если от источника постоянного тока подвести к якорю двигателя напряжение, например указанной на рис. 9.5 полярности, то во внешней цепи и в обмотке якоря возникнут токи, направление которых будет противоположным указанным на рисунке. С помощью правила левой руки можно установить, что на якорь будет действовать вращающий электромагнитный момент и якорь начнет вращаться против часовой стрелки. При вращении в обмотке якоря возникнет ЭДС, которая согласно правилу правой руки будет направлена, как указано на рис. 9.5, т. е. против тока двигателя. Противоположные направления тока и ЭДС говорят о том, что в машине происходит преобразование электрической энергии в механическую. Двигатель разгонится до такой частоты вращения, при которой его момент станет равным моменту, обусловленному нагрузкой.
Говоря о принципе действия двигателя, нельзя не остановиться на назначении коллектора в этом случае. Коллектор необходим для того, чтобы неизменный по направлению ток внешней цепи преобразовывать в изменяющийся по направлению ток в проводниках обмотки якоря при его вращении. Только благодаря коллектору ток всех проводников, находящихся под одним полюсом, имеет одно и то же направление. Вследствие этого остается неизменным и направление вращающего момента, развиваемого двигателем.
Для изменения направления вращения двигателя необходимо изменить направление развиваемого им вращающего момента. Это можно сделать одним из двух способов:
изменением полярности напряжения, подводимого к якорю двигателя и, следовательно, направления тока якоря;
изменением направления магнитного потока главных полюсов.
Обычно используется первый способ.
Рассмотрев принципы действия генератора и двигателя, можно сделать вывод о том, что машины постоянного тока обратимы. Это значит, что при определенных условиях генераторы могут работать в качестве двигателей и наоборот. Возможность двигателей работать в качестве генераторов и. следовательно, развивать тормозящий момент широко используется на практике .
Обмотки якоря.
Типы обмоток. В настоящее время в основном применяют якоря барабанного типа, в которых проводники обмотка укладывают в два слоя в пазы, расположенные на наружной поверхности якоря (рис. 8.13, а). Для того чтобы ЭДС, индуцированные в двух сторонах каждого витка, складывались, стороны его следует располагать под полюсами противоположной полярности (рис. 8.13,б). В этом случае в каждом витке индуцируется ЭДС, в два раза большая, чем в одном проводнике. Следовательно, как и в обмотках переменного тока, основной шаг обмотки должен быть примерно равен полюсному делению τ.
Рис. 8.13. Схемы расположения проводников обмотки на якоре барабанного типа (а и б) и схема двухслойной обмотки 7 (в) 1. 2, 3, .... 8, 1', 2', 3'............. 8'— проводники, образующие обмотку
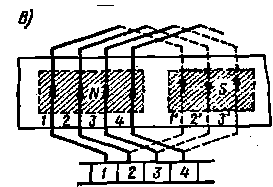
Обмотки барабанного якоря подразделяют на две основные группы: петлевые (параллельные) и волновые (последовательные). В машинах большой мощности применяют также «лягушачью» (параллельно-последовательную) обмотку, в которой сочетаются элементы петлевой и волновой обмоток. Основной частью каждой обмотки является секция, состоящая из одного или нескольких последовательно включенных витков; концы секции присоединяют к двум коллекторным пластинам. Число секций S равно числу коллекторных пластин К. Все секции обмотки обычно имеют одинаковое количество витков.
На схемах обмоток секции для простоты всегда изображают одновитковыми. При двухслойной обмотке стороны секции, расположенные в верхнем слое, изображают сплошными линиями, а в нижнем слое — штриховыми (рис. 8.13, в). Шаг секции y1 (его называют также основным или первым частичным шагом обмотки) должен быть приблизительно равен полюсному делению τ. При. y1 = τ шаг называют диаметральным; при y1 < τ — укороченным; при y1 > τ — удлиненным.
Эдс машин постоянного тока.
Как было показано ранее, ЭДС проводника обмотки якоря определяется по формуле епр = Blv.
При вращении якоря ЭДС епр изменяется в соответствии с графиком, приведенным на рис. 9.2, б. Среднее значение ЭДС проводника епр,ср при его перемещении в пределах полюсного деления можно определить через среднее значение магнитной индукции (см. рис. 9,2 б):
епр,ср = Bcplv.
Если обмотка якоря имеет N проводников и 2а параллельных ветвей, то число последовательно соединенных проводников в каждой параллельной ветви будет N/2a. Тогда среднее значение ЭДС машины
(9,4)Е = BcplN/2а
Среднее значение магнитной индукции
(9,5)Bcp =Ф/πDяl/2p
где Ф — магнитный поток одного полюса, Вб; Dя — диаметр якоря, м; 2р — число полюсов машины.
Величина πDяl/2p в (9.5) представляет собой поверхность сердечника якоря, приходящуюся на один полюс.Линейную скорость проводников v можно определить по формуле
(9,6)v =πDяn/60
где n— частота вращения якоря, об/мин.
После замены в (9.4) магнитной индукции Вср и скорости v согласно (9.5) и (9.6) получим
(9.7)Е =p/а*N/60*Фn = kеФn,
где kе =p/а*N/60- коэффициент ЭДС, зависящий от конструк тивных особенностей машины.
Как видно, ЭДС прямо пропорциональна произведению магнитного потока на частоту вращения. По формуле (9.7) можно определять как ЭДС генераторов, так и ЭДС двигателей.
Электромагнитный момент машин постоянного тока.
Электромагнитная сила в ньютонах, действующая на проводник обмотки якоря, определяется соотношением
Fпр = BlIпр = BlIя /2a,
где Iпр — ток проводника, равный току параллельной ветви, А; Iя — ток якоря, А.
При вращении якоря сила, действующая на проводник, изменяется.
Среднее значение силы можно определить через среднее значение магнитной индукции:
Fпр, ср = BcplIя/2a.
Средний электромагнитный момент, Н•м, действующий на якорь,
(9.8)Mcp = Fпр, ср*Dя/2* N= Bcpl*lя/2a*Dя/2*N.
После замены в (9.8) магнитной индукции Вср согласно (9.5) получим
(9.9)Mэм =р/а*N/2π*ФIя = kMФIя,
где kM =р/а*N/2π- коэффициент момента, зависящий от конструктивных особенностей машины.
Как видно, момент электромагнитный прямо пропорционален произведению магнитного потока на ток якоря. По формуле (9.9) можно определять как момент генераторов, так и момент двигателей.
Если момент выражен в ньютоно-метрах, то между коэффициентами kе и kM существует следующее соотношение:
kе /kM ≈ 0,105.
Электромагнитный момент Мэм, вызванный взаимодействием магнитного потока и тока якоря и определяемый по формуле (9.9), отличается от момента М, развиваемого машиной на валу, вследствие трения в подшипниках, вращающегося якоря о воздух и вентиляционных потерь. Так как указанные два момента отличаются незначительно, будем в дальнейшем считать их равными и обозначать М.
Магнитное поле машины. Реакция якоря.
Режим холостого хода. Магнитный поток при холостом ходе в машине создается только МДС Fв обмотки возбуждения. В этом случае магнитный поток Фв при симметричном воздушном зазоре между якорем и сердечником главного полюса распределяется симметрично относительно продольной оси машины (рис. 8.21).
Зависимость магнитного потока возбуждения Фв от МДС Fв (магнитная характеристика — рис. 8.22) для машин постоянного тока подобна магнитной характеристике для синхронных машин. Однако при проектировании машин постоянного тока допускают большие индукции на участках магнитной цепи (в зубцах, якоре, станине и полюсах), чем в синхронных машинах, вследствие чего для них коэффициент насыщения kнас = F/Fδ = ab/ac = 1,2 ÷ 2. Расчет магнитной цепи машины постоянного тока производят так же, как и для машин переменного тока (см. § 3.7).
Реакция якоря. При работе машины под нагрузкой по обмотке якоря проходит ток, вследствие чего возникает МДС якоря. Воздействие МДС якоря на магнитное поле машины называют реакцией якоря. Для упрощения анализа явления реакции якоря будем пренебрегать насыщением магнитной цепи машины и считать, что МДС Fв обмотки возбуждения и МДС Faq обмотки якоря расходуются на преодоление магнитными потоками воздушного зазора. В этом случае вместо указанных МДС можно рассматривать соответствующие потоки: возбуждения Фв и реакции якоря Фaq .
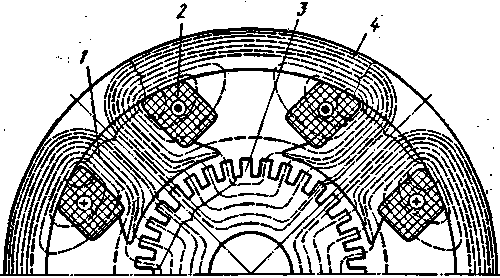
Рис. 8.21. Магнитное поле машины постоянного тока в режиме холостого хода: 1 — полюс;
2 — обмотка возбуждения;
3 — якорь;
4 — корпус (станина)
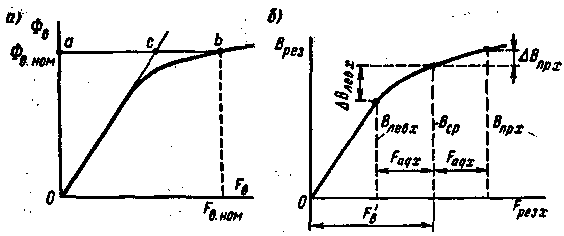
Рис. 8.22. Магнитная характеристика машины постоянного тока (а) и график для определения размагничивающего действия поперечного поля реакции якоря (б)
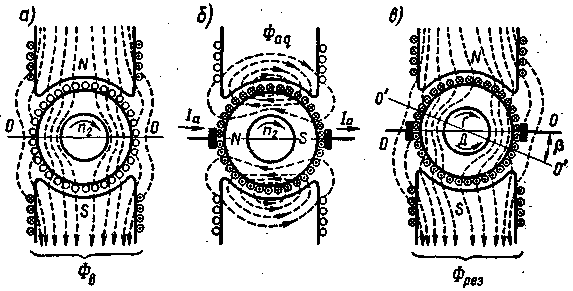
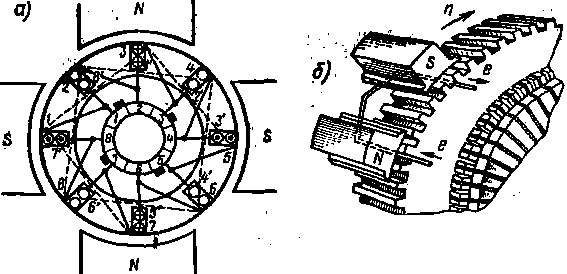
Рис. 8.23. Характер магнитного поля машины постоянного тока,:
создаваемые обмоткой возбуждения (а), обмоткой якоря (б)и результирующего поля (в)
При холостом ходе магнитный поток возбуждения направлен по продольной оси машины (рис. 8.23, а). При работе под нагрузкой магнитный поток Фaq , созданный МДС якоря Faq , в двухполюсной машине при установке щеток на геометрической нейтрали направлен по поперечной оси машины (см. рис. 8.23,б), поэтому магнитное поле якоря называют поперечным. В результате действия реакции якоря симметричное распределение магнитного поля машины относительно оси главных полюсов искажается и результирующее поле оказывается смещенным к одному из краев каждого главного полюса (см. рис. 8.23, в). При этом физическая нейтраль О' —О' (линия, соединяющая точки окружности якоря, в которых индукция равна нулю) смещается относительно геометрической нейтрали О — О на некоторый угол β. В генераторах (обозначение Г на рис. 8.23, в) физическая нейтраль смещается по направлению вращения якоря; в двигателях (обозначение Д) — против направления вращения.
Чтобы построить кривую Врез = f(х) распределения результирующей индукции вдоль окружности якоря, применим метод суперпозиции. Его можно использовать, если пренебречь насыщением магнитной цепи машины и считать, что МДС Fв и Faq расходуются на компенсацию разности магнитных потенциалов в воздушном зазоре. Так как обмотка возбуждения является сосредоточенной, то кривая распределения создаваемой ею МДС F'в =f(x) имеет форму прямоугольника, где F'в = 0,5Fв — МДС, приходящаяся на один воздушный зазор. В этом случае кривая индукции Вв = f(x) имеет форму криволинейной трапеции (рис. 8.24, а).
Коммутация машин постоянного тока.
Под коммутацией в машинах постоянного тока понимают процесс переключения секций обмотки якоря из одной параллельной ветви в другую, сопровождающийся изменением направления тока в секциях. Направления и значения тока коммутируемой (переключаемой) секции в различных ее положениях относительно неподвижной щетки показаны на рис. 9.10.
В результате изменения тока в коммутирующей секции возникает ЭДС самоиндукции eL.
Для увеличения механической прочности щеток их ширину выбирают обычно больше ширины коллекторной пластины. Вследствие этого щеткой замыкаются накоротко и одновременно коммутируются несколько секций. Последнее вызывает в каждой секции ЭДС взаимной индукции еM. Кроме того, в секции возникает ЭДС еv, вызываемая вращением секции в магнитном поле поперечной реакции якоря.
Сумма перечисленных ЭДС невелика. Однако, поскольку секция замкнута щеткой накоротко, это приводит к заметному дополнительному току в замкнутом контуре секции, в результате чего плотность тока под щеткой становится неодинаковой. Под сбегающим краем щетки плотность тока возрастает, что приводит к искрению под щеткой, особенно интенсивному в момент размыкания секции. Если не принять специальных мер для улучшения условий коммутации (уменьшения искрения под щетками), то наиболее ответственная часть машины — коллектор — через непродолжительное время выйдет из строя.
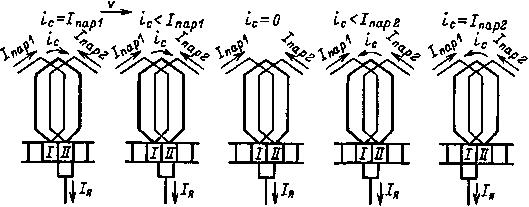
Рис. 9.10. К пояснению явления коммутации
Способы улучшения коммутации.
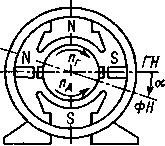
Рис. 9.11. Полярность главных и дополнительных полюсов
Для улучшения коммутации машины мощностью 1 кВт и более снабжаются дополнительными полюсами (рис. 9.11). В машинах с дополнительными полюсами щетки устанавливают на геометрической нейтрали. С помощью дополнительных полюсов в зоне коммутации создается магнитное поле, в результате чего в коммутируемых секциях индуктируется ЭДС, компенсирующая ЭДС eL, eM и ev. Так как ЭДС eL, eM и ev зависят от тока якоря, то для их компенсации при различных нагрузках обмотку дополнительных полюсов включают последовательно с якорем. Вследствие насыщения дополнительных полюсов при перегрузках машины условия коммутации ухудшаются и под щетками появляется недопустимое искрение. Наибольший допустимый ток машин постоянного тока определяется условиями коммутации и лежит для различных машин в пределах (2 ÷ 3) Iном , где Iном — номинальный ток машины.
Так как ЭДС ev возникает вследствие вращения якоря в магнитном поле реакции якоря, то для ее уничтожения с помощью МДС дополнительных полюсов должно быть создано магнитное поле, от вращения в котором возникла бы ЭДС, направленная против ev. Учитывая характер изменения результирующего магнитного поля при нагрузке генератора и двигателя с указанными направлениями их вращения (см. рис. 9.8, в), следует сказать: полярность дополнительного полюса генератора должна быть такой же, как последующего за ним по направлению вращения главного полюса (рис. 9.11); полярность дополнительного полюса двигателя должна быть такой же, как предшествующего ему по направлению вращения главного полюса. Выбирая соответствующее значение МДС обмотки дополнительных полюсов, можно скомпенсировать также ЭДС eL и еM.
Двигатели постоянного тока. Способы возбуждения.
Свойства и характеристики двигателей постоянного тока существенно зависят от того, как меняется магнитный поток двигателей при изменении их механической нагрузки. Характер изменения магнитного потока зависит в свою очередь от числа и способа включения обмоток возбуждения, т. е. от способа возбуждения двигателей. В зависимости от способа возбуждения различают:
двигатели независимого возбуждения;
двигатели параллельного возбуждения (ранее шунтовые);
двигатели последовательного возбуждения (ранее сериесные);
двигатели смешанного возбуждения (ранее компаундные).
Двигатели независимого возбуждения находят применение, когда обмотки якоря и возбуждения должны получать питание от различных источников постоянного тока. Это может быть в случае использования двигателей значительной мощности, обмотку якоря которых изготовляют обычно на более высокое напряжение, чем обмотку возбуждения. Кроме того, раздельное питание обмоток якоря и возбуждения применяется для расширения диапазона регулирования частоты вращения и улучшения качества переходных процессов пуска, торможения и реверса двигателей.
При изложении материала сначала будут рассмотрены свойства и характеристики двигателей параллельного, последовательного и смешанного возбуждения, получающих питание от источника (от сети) с неизменным напряжением, а далее, в конце § 9.18,— свойства и характеристики двигателя независимого возбуждения, обмотка якоря которого питается от источника с изменяемым напряжением.
Для более четкого представления о том, чем отличаются двигатели параллельного, последовательного и смешанного возбуждения, будем рассматривать их совместно, предполагая для удобства сравнения, что различные двигатели имеют одинаковое номинальные данные (в частности, номинальные магнитные потоки Фном, токи якоря Iя,ном , моменты Мном и частоты вращения nном).
Рис. 9.22. Схема включения двигателя смешанного возбуждения
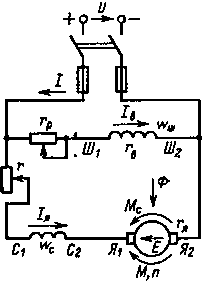
На рис. 9.22 приведена схема включения двигателя смешанного возбуждения. Магнитное поле двигателя возбуждается двумя обмотками: обмоткой параллельного возбуждения Ш1 — Ш2 и обмоткой последовательного возбуждения C1 — C2. В двигательном режиме работы обмотки включены согласно. Как и у генераторов, обмотки параллельного и последовательного возбуждения существенно отличаются в конструктивном отношении (см. § 9.7).
Имея схему включения двигателя смешанного возбуждения (рис. 9.22), нетрудно представить себе схемы включения двух других двигателей. Исключив мысленно обмотку C1 — C2, получим схему включения двигателя параллельного возбуждения; исключив цепь обмотки Ш1 — Ш2, получим схему включения двигателя последовательного возбуждения.
В цепь якоря двигателей включают реостат r, служащий для пуска двигателей. Им же пользуются иногда для регулирования частоты вращения. Реостат rр включают в цепи двигателей параллельного или смешанного возбуждения лишь в том случае, если необходимо регулировать частоту вращения путем изменения магнитного потока.
Направления токов якоря Iя , возбуждения Iв , тока I, потребляемого из сети (рис. 9.22), магнитного потока Ф, ЭДС Е, момента М и частоты вращения и двигателя зависят от полярности напряжений на выводах обмоток якоря и возбуждения, а также от того, в двигательном или каком-либо из тормозных режимов работает электродвигатель.
Двигательным называется режим, при котором направление частоты вращения и якоря определяется направлением действия момента М двигателя. При установившемся движении момент М двигателя уравновешивается статическим моментом Мс, возникающим на валу двигателя под действием производственной машины. В двигательном режиме работы статический режим Мс является тормозящим и направлен против направления частоты вращения n. Тормозные режимы рассматриваются в § 9.19.
Пуск двигателя постоянного тока.
На практике замечено, что ток, потребляемый обмоткой статора в первый момент пуска двигателя, очень большой. В ряде случаев он превышает номинальный ток в 6 - 10 раз.
Такой нагрузки может не выдержать не только питающая сеть, но и сама обмотка статора. Поэтому для пуска крупных асинхронных двигателей применяют специальные устройства, снижающие пусковой ток. На рис. 5.13.1. показаны схемы пуска мощных двигателей с помощью реакторов и автотрансформатора.
Принцип ограничения тока заключается в том, что к статорной обмотке двигателя на период пуска подводится пониженное напряжение. После разгона его дополнительные устройства от двигателя отключаются.
Иногда для снижения напряжения, подаваемого в обмотки статора, изменяют схему переключения обмоток. Например, асинхронный двигатель нормально работает по схеме "треугольник". Если на период пуска его обмотки включить "звездой", то на каждую фазу придется напряжение в раз меньшее.
Двигатели с фазным ротором пускаются в работу с помощью дополнительных сопротивлений. Вводя дополнительные сопротивления в цепь ротора, добиваются ограничения пускового тока.
В начальный момент пуска в ход якорь двигателя неподвижен и противо-эдс равна нулю (Е = 0). При непосредственном включении двигателя в сеть в обмотке якоря будет протекать чрезмерно большой ток Iпуск = U/Rя. Поэтому непосредственное включение в сеть допускается только для двигателей очень малой мощности, у которых падение напряжения в якоре представляет относительно большую величину и броски тока не столь велики.
В машинах постоянного тока большой мощности падение напряжения в обмотке якоря при полной нагрузке составляет несколько процентов от номинального напряжения, т. е. IRя = (0,02 0,1)U.
Следовательно, пусковой ток в случае включения двигателя в сеть с номинальным напряжением во много раз превышает номинальный.
Для ограничения пускового тока используют пусковые реостаты, включаемые последовательно с якорем двигателя при пуске в ход.
Пусковые реостаты представляют собой проволочные сопротивления, рассчитываемые на кратковременный режим работы, и выполняются ступенчатыми, что дает возможность изменять ток в якоре двигателя в процессе пуска его в ход.
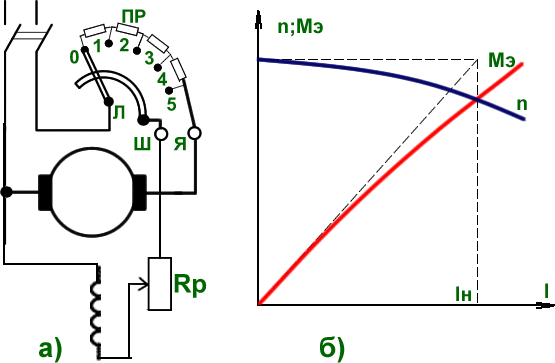
Схема двигателя параллельного возбуждения с пусковым реостатом показана на изо, а.
Пусковой реостат этого двигателя имеет три зажима, обозначаемые
буквами Л, Я, Ш.
Зажим Л соединен с движком реостата и подключается к одному из полюсов рубильника (к линии). Зажим Я соединяется с сопротивлением реостата и подключается к зажиму якоря. Зажим Ш соединен с металлической шиной, помещенной на реостате (шунт).
Движок реостата скользит по шине так, что между ними имеется непрерывный контакт. К зажиму Ш через регулировочное сопротивление Rр присоединяется обмотка возбуждения. Вторые зажимы якоря и обмотки возбуждения соединены между собой перемычкой и подключены ко второму полюсу рубильника, включающего двигатель в сеть.
При пуске в ход включается рубильник и движок реостата переводится на контакт 1, так что последовательно с якорем соединено полное сопротивление пускового реостата ПР, которое выбирается таким, чтобы наибольший ток при пуске в ход Imах не превышал номинальный ток более чем в 1,7—2,5 раза, т.е.
Rп = U/Imax - Rя.
При включении двигателя в сеть по обмотке возбуждения также проходит ток, возбуждающий магнитный поток. В результате взаимодействия тока в якоре с магнитным полем полюсов создается пусковой момент.
Если пусковой момент окажется больше тормозного момента на валу двигателя (Мпуск > Мт), то якорь машины придет во вращение
.Схема (а) и характеристики (б) двигателя параллельного возбуждения
Под действием инерции частота вращения не может претерпевать мгновенных изменений и будет постепенно увеличиваться. Вместе с ней возрастает противо-эдс и ток в якоре начнет уменьшаться, что вызывает уменьшение вращающего момента двигателя.
В рабочем режиме сопротивление пускового реостата должно быть полностью выведено, так как оно рассчитано на кратковременный режим работы и при длительном прохождении тока выйдет из строя.
Когда ток в якоре уменьшится до небольшого значения Imin, движок пускового реостата переводится на контакт 2. При этом сопротивление пускового реостата уменьшится на одну ступень, что увеличит ток.
Сопротивление всех ступеней пускового реостата выбирают так, чтобы при переводе движка реостата с одного контакта на другой ток в якоре изменялся от Imin до Imax.
С увеличением тока в якоре возрастает вращающий момент, вследствие чего частота вращения вновь увеличивается. С увеличением частоты вращения якоря возрастает противо-эдс, что вызовет уменьшение тока в якоре.
Когда ток в якоре достигает вновь наименьшего значения, движок реостата переводится на контакт 3.
Таким образом, сопротивление пускового реостата постепенно (ступенями) уменьшается, пока оно полностью не будет выведено (движок реостата на контакте 5), и в рабочем режиме ток и частота вращения якоря принимают установившиеся значения, соответствующие тормозному моменту на валу двигателя.
Наименьший ток при пуске в ход зависит от режима работы двигателя.
Если двигатель пускается при полной нагрузке, то Imin = 1.1Iн.
При пуске двигателя без нагрузки или при малых нагрузках этот ток может быть меньше номинального тока двигателя.
Число ступеней пускового реостата зависит от разности Imax - Imin, причем чем меньше разность этих токов, тем больше число ступеней. Обычно пусковые реостаты имеют от 2 до 7 ступеней. При пуске двигателя в ход регулировочное сопротивление Rv в цепи возбуждения должно быть полностью выведено, т. е. ток возбуждения должен быть наибольшим, что дает возможность уменьшить пусковой ток.
Для пуска двигателя необходимо создать пусковой момент, больший тормозного момента на валу.
Так как Mпуск = KIпускФ, то для уменьшения пускового тока надо увеличить магнитный поток, т. е. увеличить ток в обмотке возбуждения.
Металлическая шина пускового реостата соединена с зажимом 1. Это необходимо для того, чтобы при отключении двигателя от сети не было разрыва цепи обмотки возбуждения, имеющей значительную индуктивность.
При отключении двигателя движок пускового реостата переводится на холостой контакт 0 и рубильник отключается. При этом обмотка возбуждения будет замкнута на сопротивление пускового реостата и якоря, что дает возможность избежать перенапряжений и дугообразования.
Скоростные и механические характеристики двигателя постоянного тока.
Скоростные характеристики дают зависимость скорости вращения п от полезной мощности Р2 на валу двигателя в случае, если напряжение U сети и сопротивление rв регулировочного реостата цепи возбуждения остаются неизменными, т. е. n=f(P2), при U=const и rв = const.
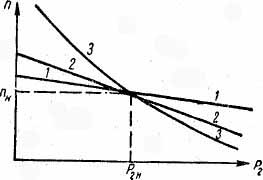
Рис. 3. Скоростные характеристики
С возрастанием тока якоря при увеличении механической нагрузки двигателя параллельного возбуждения одновременно увеличивается падения напряжения в якоре и появляется реакция якоря, которая обычно действует размагничивающим образом. Первая причина стремится уменьшить скорость вращения двигателя, вторая — увеличить. Действие падения напряжения в якоре обычно оказывает большее влияние. Поэтому скоростная характеристика двигателя параллельного возбуждения имеет слегка падающий характер (кривая 1, рис. 3).
В двигателе последовательного возбуждения ток якоря является током возбуждения. В результате скоростная характеристика двигателя с последовательным возбуждением имеет характер, близкий к гиперболическому. При увеличении нагрузки по мере насыщения магнитной цепи характеристика приобретает более прямолинейный характер (кривая 3 на рис. 3).
В компаундном двигателе при согласном включении обмоток скоростная характеристика занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения (кривая 2).
Важнейшей характеристикой двигателя является механическая n(M). Она показывает, как зависит частота вращения двигателя от развиваемого момента. Если к обмоткам двигателя подведены номинальные напряжения и отсутствуют дополнительные резисторы в его цепях, то двигатель имеет механическую характеристику, называемую естественной. На естественной характеристике находится точка, соответствующая номинальным данным двигателя (Мн, Ря и т.д.). Если же напряжение на обмотке якоря меньше номинального, либо Iв < Iвн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения.
Преобразовав выражение (3) относительно частоты вращения, получим уравнение электромеханической характеристики n(Iя):
![]() (7)
(7)
После замены в уравнении (7) тока Iя согласно формуле (1), получим уравнение механической характеристики n(М):
![]() (8)
(8)
При Ф = соnst, электромеханическая n(Iя) и механическая n(М) характеристики двигателя параллельного возбуждения представляют собой прямые линии. Так как за счет реакции якоря магнитный поток немного изменяется, то характеристики в действительности несколько отличаются от прямых.
При работе вхолостую (М = 0) двигатель имеет частоту вращения холостого хода, определяемую первым членом уравнения (8). С увеличением нагрузки n уменьшается. Как следует из уравнения (8), это объясняется наличием сопротивления якоря rя.
Поскольку rя не велико, частота вращения двигателя при увеличении момента изменяется мало, и двигатель имеет жесткую естественную механическую характеристику (рис.6, характеристика 1).
Из уравнения (8) следует, что регулировать частоту вращения при заданной постоянной нагрузке (М = const) можно тремя способами:
а) изменением сопротивления цепи якоря;
б) изменением магнитного потока двигателя;
в) изменением напряжения на зажимах якоря.
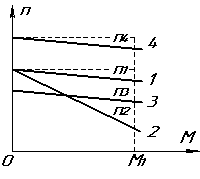
Рис. 6 Механические характеристики
Для регулирования частоты вращения первым способом в цепь якоря. должно быть включено добавочное сопротивление rд. Тогда сопротивление в уравнении (8) необходимо заменить на rя + rд.
Как следует из уравнения (8), частота вращения n связана с сопротивлением цепи якоря rя + rд при постоянной нагрузке (М = const) линейной зависимостью, т.е. при увеличении сопротивления частота вращения уменьшается. Разным сопротивлениям rд соответствуют различные искусственные механические характеристики, одна из которых приведена на рис.2 (характеристика 2). С помощью характеристики 2 при заданном моменте М1 можно получить частоту вращения n2.
Изменение частоты вращения вторым способом осуществляется с помощью регулируемого источника напряжения UD2. Изменяя его напряжение регулятором R2, можно изменить ток возбуждения IВ и тем самым магнитный поток двигателя. Как видно из уравнения (8), при постоянной нагрузке (М = соnst) частота вращения находится в сложной зависимости от магнитного потока Ф. Анализ уравнения (8) показывает, что в некотором диапазоне изменения магнитного потока Ф уменьшение последнего приводит к увеличению частоты вращения. Именно этот диапазон изменения потока используют при регулировании частоты вращения.
Каждому значению магнитного потока соответствует искусственная механическая характеристика двигателя, одна из которых приведена на рис.2 (характеристика 4). С помощью характеристики 4 при моменте М1 можно получить частоту вращения n4.
Чтобы регулировать частоту вращения изменением напряжения на зажимах якоря, необходимо иметь относительно мощный регулируемый источник напряжения. Каждому значению напряжения соответствует искусственная механическая характеристика двигателя, одна из которых приведена на рис.2(характеристика 3). С помощью характеристики 3 при заданном моменте М1 можно получить частоту вращения n3.
ЭЛЕКТРОМАШИННЫЕ УСИЛИТЕЛИ
1.1. ОБЩИЕ СВЕДЕНИЯ И КЛАССИФИКАЦИЯ
Усилителем называют такое устройство, в котором по средством сигнала малой мощности (входная величина) управляют сравнительно большой мощностью (выходная величина). При этом выходная величина является функцией входного сигнала и усиле ние происходит за счет энергии внешнего источника.
По виду управляемой энергии усилители можно разделить на электрические, пневматические, гидрав лические, механические.
Электрические усилители в свою очередь подразделяются на электронные, тиратронные, транзисторные, магнитные, сег-нетоэлектрические и электромашинные. Первые пять являются статическими, а электромашинные — вращающимися усилителями.
В электромашинных усилителях выходная (управляемая) элек трическая мощность создается за счет механической мощности при водного двигателя.
Электромашинные усилители (ЭМУ) представляют собой кол лекторную машину постоянного тока.
В зависимости от способа возбуждения электромашинные уси лители подразделяются на усилители продольного поля и усили тели поперечного поля.
К усилителям продольного поля, в которых основной поток воз буждения направлен по продольной оси машины, относятся:
1) независимый ЭМУ,
2) ЭМУ с самовозбуждением,
двухмашинные усилители,
4) двухколлекторный ЭМУ,
5)двух- и трехступенчатые ЭМУ продольного поля
К усилителям поперечного поля, в которых основной поток воз буждения направлен по поперечной оси машины, относятся:
1 )ЭМУ с диаметральным шагом обмотки якоря,
2) ЭМУ с полудиаметральным шагом обмотки якоря,
ЭМУ с разделенной магнитной системой.
Чем меньше мощность управления электромашинного усилителя, тем меньше вес и габариты аппаратуры управления. Поэтому
основной характеристикой является коэффициент усиления. Различают коэффициенты усиления по мощности, току и напряжению.
Коэффициент усиления ЭМУ по мощности kp есть отношение мощности на выходе РВых к мощности на входе Рвх при установившемся режиме работы:
Коэффициент усилен
Коэффициент усиления по напряжению
где UВЫХ — напряжение выходной цепи; — напряжение входной цепи.
Из сказанного следует, что
Коэффициент усиления п о току kt — это отношение тока выход ной цепи /вых усилителя к току входной цепи /вх:
Электромашинные усилители могут иметь достаточно высокий коэффициент усиления по мощности (103-М05).
Не менее важным для усилителя является его быстродействие, характеризуемое постоянными времени его цепей.
Постоянная времени определяется величиной энергии магнит ного поля, изменяющегося в процессе регулирования. Для элект рической цепи постоянная времени
где L — индуктивность цепи;
ΣR — активное сопротивление цепи. В электромашинных усилителях постоянная времени T= 0,02÷0,2 сек.
От ЭМУ стремятся получить большой коэффициент усиления по мощности и большое быстродействие, т. е. по возможности мень шие постоянные времени. Так как постоянная времени ЭМУ про порциональна коэффициенту усиления по мощности ЭМУ, то для удобства сравнения различных усилителей вводят коэффициент добротности &д, представляющий собой отношение коэффициента по мощносте к сумме постоянных времени ступеней усиления:
B системах автоматического регулирования ЭМУ применяются в качестве усилителей мощности и работают в основном при пере ходных режимах, в процессе которых возникаютзначительные пере грузки по току. Поэтому одним из требований к ЭМУ является хорошая перегрузочная способность.
К числу важнейших требований, предъявляемых к ЭМУ, от носятся надежность в работе и стабильность характеристик.
ЭМУ, используемые на самолетах и транспортных установках, должны обладать минимальными габаритами и весом.
В радиоэлектронной промышленности наибольшее распростра нение получили независимый ЭМУ, ЭМУ с самовозбуждением и ЭМУ поперечного поля с диаметральным шагом. Далее рассмот рены эти типы усилителей.