

Принцип действия трехфазного синхронного двигателя
Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля якоря и магнитного поля полюсов индуктора. Обычно якорь расположен на статоре, а индуктор — на роторе. В мощных двигателях в качестве полюсов используются электромагниты (ток на ротор подаётся через скользящий контакт щетка - кольцо), в маломощных — постоянные магниты. Существует обращённая конструкция двигателей, в которой якорь расположен на роторе, а индуктор — на статоре (в устаревших двигателях, а также в современных криогенных синхронных машинах, в которых в обмотках возбуждения используются сверхпроводники.)
Запуск двигателя. Двигатель требует разгона до частоты, близкой к частоте вращения магнитного поля в зазоре, прежде чем сможет работать в синхронном режиме. При такой скорости вращающееся магнитное поле якоря сцепляется с магнитными полями полюсов индуктора (если индуктор расположен на статоре, то получается, что вращающееся магнитное поле вращающегося якоря (ротора) неподвижно относительно постоянного поля индуктора (статора), если индуктор на роторе, то магнитное поле вращающихся полюсов индуктора (ротора) неподвижно относительно вращающегося магнитного поля якоря (статора)) — это явление называется «вход в синхронизм».
Для разгона обычно используется асинхронный режим, при котором обмотки индуктора замыкаются через реостат или накоротко, как в асинхронной машине, для такого режима запуска в машинах на роторе делается короткозамкнутая обмотка, которая также выполняет роль успокоительной обмотки, устраняющей "раскачивание" ротора при синхронизации. После выхода на скорость близкую к номинальной (>95%) индуктор запитывают постоянным током.
В двигателях с постоянными магнитами применяется внешний разгонный двигатель.
Часто на валу ставят небольшой генератор постоянного тока, который питает электромагниты.
Также используется частотный пуск, когда частоту тока якоря постепенно увеличивают от 0 до номинальной величины. Или наоборот, когда частоту индуктора понижают от номинальной до 0, т.е. до постоянного тока.
Частота вращения ротора [об/мин] остаётся неизменной, жёстко связанной с частотой сети [Гц] соотношением:
,
где — число пар полюсов ротора.
Синхронные двигатели при изменении возбуждения меняют импеданс с емкостного на индуктивный. Перевозбуждённые СД на холостом ходу применяют в качестве компенсаторов реактивной мощности. Синхронные двигатели в промышленности обычно применяют при единичных мощностях свыше 300 кВт, при меньших мощностях обычно применяется более простой (и надежный) асинхронный двигатель с короткозамкнутым ротором.
Пуск асинхронного двигателя
Прямой пуск
Прямой пуск применяется для двигателей с короткозамкнутым ротором. Для этого они проектируются так, чтобы пусковые токи, протекающие в обмотке статора, не создавали больших механических усилий в обмотках и не приводили к их перегреву. Но при прямом пуске двигателей большой мощности в сети могут возникать недопустимые, более 15%, падения напряжения, что приводит к неустойчивой работе пусковой аппаратуры (дребезжание), подгоранию контактов и практически к невозможности пуска.
Такие явления могут быть в маломощной сети или при большом удалении от подстанции пускаемого двигателя.
Пуск при пониженном напряжении
Этот способ пуска применяется для двигателей средней и большой мощности при ограниченной мощности сети.
Рассмотрим некоторые способы понижения напряжения при пуске.
Переключение обмотки статора двигателя с пусковой схемы звезда на рабочую схему треугольник
Для лучшего понимания способа пуска разберем схемы соединения обмоток двигателей и влияние этих схем на величину фазного напряжения двигателя при заданном линейном напряжении.
Обмотки двигателей могут соединяться звездой или треугольником. Тип соединения определяет соотношение между напряжением на зажимах двигателя и напряжением на фазах его обмотки, т. е. номинальным напряжением двигателя. Напряжение на зажимах двигателя измеряется между его зажимами и называется линейным, и на фазе обмотки — между ее началом и концом и называется фазным.
Как известно, при соединении треугольником напряжения линейное и фазное равны, а при соединении звездой линейное напряжение больше фазного в √3 раз.
Двигатель может иметь в коробке зажимов три или шесть концов. При наличии шести концов возможно соединение двигателя звездой или треугольником в зависимости от напряжения сети, к которой будет присоединяться двигатель, и его номинального напряжения.
Если номинальное напряжение двигателя 220 В, то при линейном напряжении сети 380 В его нужно соединять звездой, а при линейном напряжении сети 220 в г- треугольником.
При номинальном напряжении двигателя 380 В и линейном напряжении сети 380 В двигатель нужно соединять треугольником, а при линейном напряжении сети 660 В — звездой.
Как соединять выводные концы двигателя при различных схемах соединения его обмоток, видно из схем соединения обмоток, показанных на рис. 2.17, б, в, где указаны стандартные обозначения концов и начал фазных обмоток двигателя.
Если в коробке зажимов двигателя имеется три вывода обмоток с зажимами, то он имеет определенную схему соединения обмоток в зависимости от напряжения, на которое он рассчитан.
Схема пуска двигателя включением на пусковую схему звезда и с переключением на рабочую схему треугольник показана на рис. 2.18.
Рис. 2.18. Схема пуска трехфазного асинхронного электродвигателя включением на пусковую схему «звезда» и с переключением на рабочую схему «треугольник»: SB1- кнопка KME4201 (красная); SB2 — кнопка КМЕ4201 (черная); КМ2.1, КМ2.2-пускатель ПМА-3100У4, 220 В; КТ1 — промежуточное реле РПЛ2204, 220 В, пневмоприставка ПВЛ1104; М2 — электродвигатель А02—72—2,30 кВт, 2910 об/мин;
QF2 —выключатель автоматический АЕ2046, 63 A; SF2 —выключатель автоматический А63, 4 A; OS1 —выключатель пакетный ПВЗ—100.
Перед пуском двигателя включаются выключатели QS1, OF2 и SF2. При нажатии на кнопку SB2 включается пускатель КМ2.1, соединяющий концы фазных обмоток двигателя в звезду. Одновременно включается реле времени КТ1, замыкая контакт КТ1.3, шунтирующий контакты кнопки SB2, С выдержкой времени, необходимой для разгона двигателя, отключается контакт КТ1.1 реле времени, отключая пускатель КМ2.1, и включается контакт КТ1.2, включающий пускатель КМ2.2, переключающий концы фазных обмоток двигателя на треугольник, и двигатель продолжает работать.
Так как при пуске двигателя при подключении по схеме звезда фазное напряжение обмотки уменьшается в √3 раз по сравнению со схемой треугольник, то фазные токи также умень шаются в √3 раз, которые равны линейным токам при этой схеме. Но при схеме треугольник, являющейся рабочей в данном случае, фазные токи меньше линейных в √3 раз, а при пусковой схеме звезда получается еще уменьшение фазных токов в √3 раз, и в результате линейные токи, равные фазным при пусковой схеме звезда, уменьшаются в 3 раза.
После разгона двигателя обмотка его статора переключается на нормальную схему треугольник, поэтому схема пуска двигателя кратко называется схемой пуска переключением со звезды на треуголник.
Пуск электродвигателя с помощью тиристорного регулятора напряжения
Схема включения двигателя с помощью тиристорного регулятора напряжения представлена на рис. 2.19.
Рис. 2-19 Схема пуска трехфазного асинхронного электродвигателя СПО мощью тиристорного регулятора напряжения (ТРН).
В регуляторе напряжения в каждый фазный провод включаются встречно- параллельно два тиристора, один из которых работает условно в положительный полупериод напряжения сети, а другой в отрицательный.
Регулирование напряжения на выходе регулятора осуществляется изменением времени включения каждого тиристора относительно момента, когда ток должен переходить с одного из трех тиристоров на другой (базовая точка), путем подачи на тиристор управляющего импульса, что дает возможность изменять время протекания тока через тиристор в течение полупериода напряжения сети и напряжение на его выходе, подаваемое на нагрузку, в данном случае на двигатель.
Это напряжение не является синусоидальным, и его можно представить как среднее напряжение, которое можно менять, изменяя продолжительность работы тиристора в течение полупериода.
Время включения тиристора относительно базовой точки выражается в градусах и называется углом регулирования [7]. Изменяя угол регулирования тиристоров, можно получить необходимое напряжение для плавного пуска двигателя.
Электромагнитный момент.
В синхронных машинах большой и средней мощности потери мощности в обмотке якоря ΔРа эл = mIa2Ra малы по сравнению с электрической мощностью Р, отдаваемой (в генераторе) или потребляемой (в двигателе) обмоткой якоря. Следовательно, если пренебречь величиной ΔРа эл, то можно считать, что электромагнитная мощность машины Рэм = Р. Электромагнитный момент пропорционален мощности Рэм, поэтому для неявнополюсной и явнополюсной машин соответственно
(3.35)М = Рэм/ω1 = [mUE0/(ω1Xсн )] sin θ;
(3.36)М = Рэм /ω1 = [mUE0 /(ω1 Xd )] sinθ + [mU2/(2ω1 )] (1/Xq - 1/Xd ) sin 2θ.
Рис. 6.38. Угловые характеристики явнополюсной и неявнополюсной машин
Рис. 6.39. Характер взаимодействия
потоков Фв и ΣФ в синхронной
машине
При неявнополюсной машине зависимость М = f(θ) представляет собой синусоиду, симметричную относительно осей координат (рис. 6.38, кривая 1). При явнополюсной машине из-за неодинаковой магнитной проводимости по различным осям (Хd ≠ Xq ) возникает реактивный момент
(6.37)Мр = [mU2 /(2ω1 )] (1/Хq - 1/Хd ) sin 2θ
Он появляется в результате стремления ротора ориентироваться по оси результирующего поля, что несколько искажает синусоидальную зависимость М = f(θ) (кривая 2). Реактивный момент возникает даже при отсутствии тока возбуждения (когда Е0 = 0); он пропорционален sin 2θ (кривая 3). Так как электромагнитная мощность Рэм пропорциональна моменту, то приведенные на рис. 6.38 характеристики в другом масштабе представляют собой зависимости Рэм = f (θ) или при принятом предположении (ΔРа эл = 0) — зависимости Р = f (θ). Кривые М = f (θ) и Рэм = f (θ) называют угловыми характеристиками.
Физически полученная форма кривой М =f (θ) обусловлена тем, что потоки Фв и ΣФ сдвинуты между собой на тот же угол θ, на который сдвинуты векторы É0 и Ú (векторы Фв и ΣФ опережают É0 и Ú на 90°). Поэтому если угол θ = 0 (холостой ход), то между ротором и статором существуют только силы притяжения f, направленные радиально (рис. 6.39, а),и электромагнитный момент равен нулю.
При θ > 0 (генераторный режим) ось потока возбуждения Фв (полюсов ротора) под действием вращающего момента Мвн опережает ось суммарного потока ΣФ на угол θ (рис. 6.39, б), вследствие чего электромагнитные силы, возникающие между ротором и статором, образуют тангенциальные составляющие, которые создают электромагнитный тормозной момент М. Максимум момента соответствует значению θ = 90°, когда ось полюсов ротора расположена между осями «полюсов» суммарного потока ΣФ. При θ < 0 (двигательный режим) ось потока возбуждения под действием тормозного момента нагрузки Мвн отстает от оси суммарного потока (рис. 6.39, в), вследствие чего тангенциальные составляющие электромагнитных сил, возникающие между ротором и статором, создают электромагнитный вращающий момент М.
Рабочие характеристики синхронного двигателя
Рабочими характеристиками синхронного двигателя являются зависимости потребляемой мощности P1, потребляемого тока I1, вращающего момента М, cosφ и КПД (η) от полезной мощности нагрузки P2. Они изображены на рис.9.7 и соответствуют случаю, когда на холостом ходу cosφ =1.
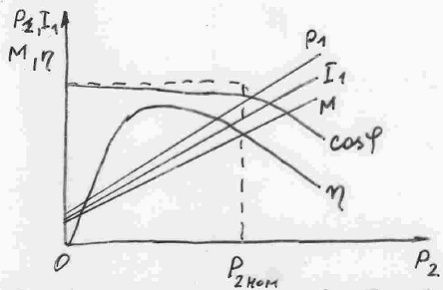
Рис.9.7.
При постоянном токе возбуждения увеличение нагрузки на валу вызывает уменьшение cosφ, что объясняется увеличением реактивного падения напряжения при возрастании потребляемого от сети тока I1. КПД η с увеличением нагрузки быстро увеличивается и достигает максимума, когда не зависящие от нагрузки механические потери и потери в стали становятся равными зависящим от нагрузки потерям в меди обмоток. Дальнейшее увеличение нагрузки снижает КПД. Потребляемый статором ток I1 на холостом ходу мал, при этом cosφ =1. При увеличении нагрузки I1 возрастает практически пропорционально нагрузке. Вращающий момент М на холостом ходу мал, т.к. механические потери невелики. При увеличении нагрузки, благодаря постоянству скорости вращения синхронного двигателя, вращающий момент возрастает почти линейно.
Потребляемая мощность Р1 растёт быстрее, чем полезная мощность Р2, т.к. при увеличении нагрузки сказывается увеличение электрических потерь в двигателе, которые пропорциональны квадрату тока.