

9 Двухмассовая система
9.1. Моделирование двухмассовой системы со стандартными настройками.
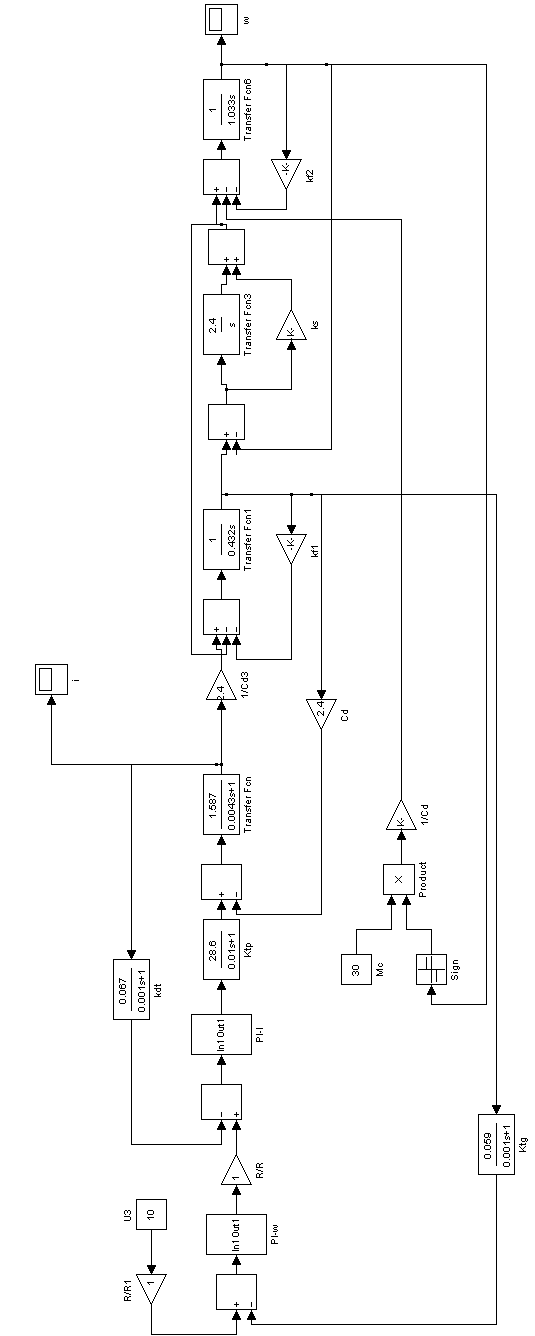
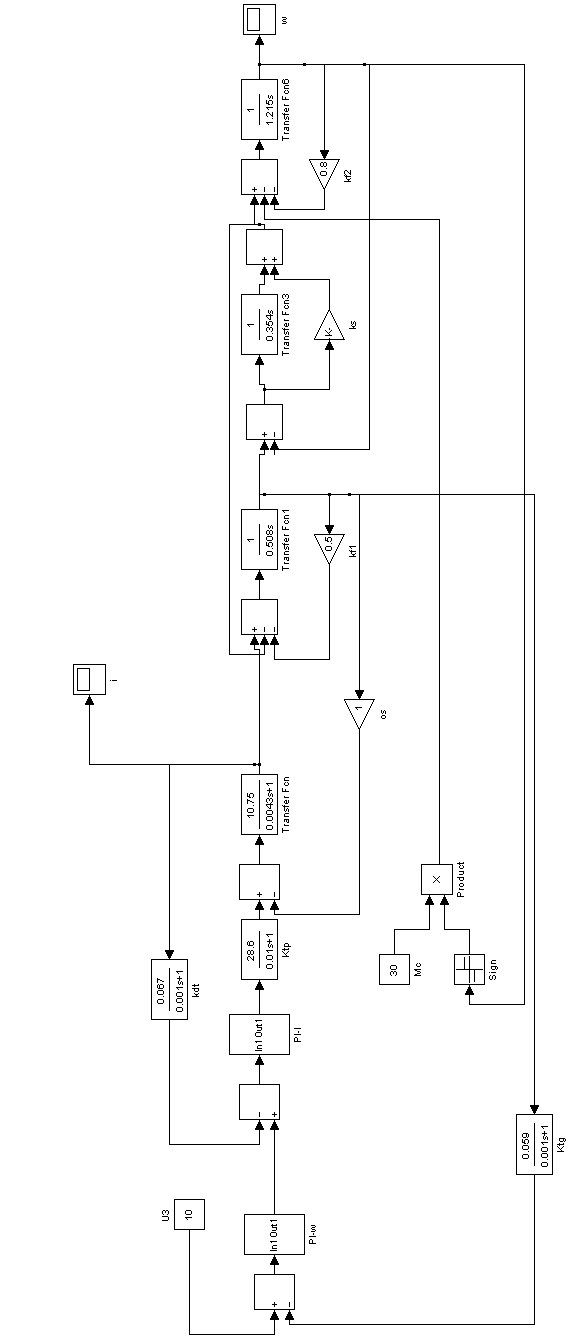
Соберем и смоделируем двухмассовую систему в пакете программ MatLab 7.5.0 Simulink [3] рис.15, подблоки ПИ-регуляторов показаны на рис.16. Используя расчет приведенный выше, и получим графики тока и скорости рис.17
При этом, учтём следущие коэффициенты:
 ;
;
 ;
;
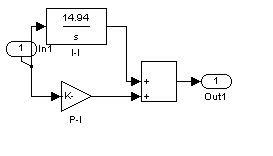

а б
Рис.16 а-ПИ- регулятор контура тока, б-ПИ-регулятор контура скорости
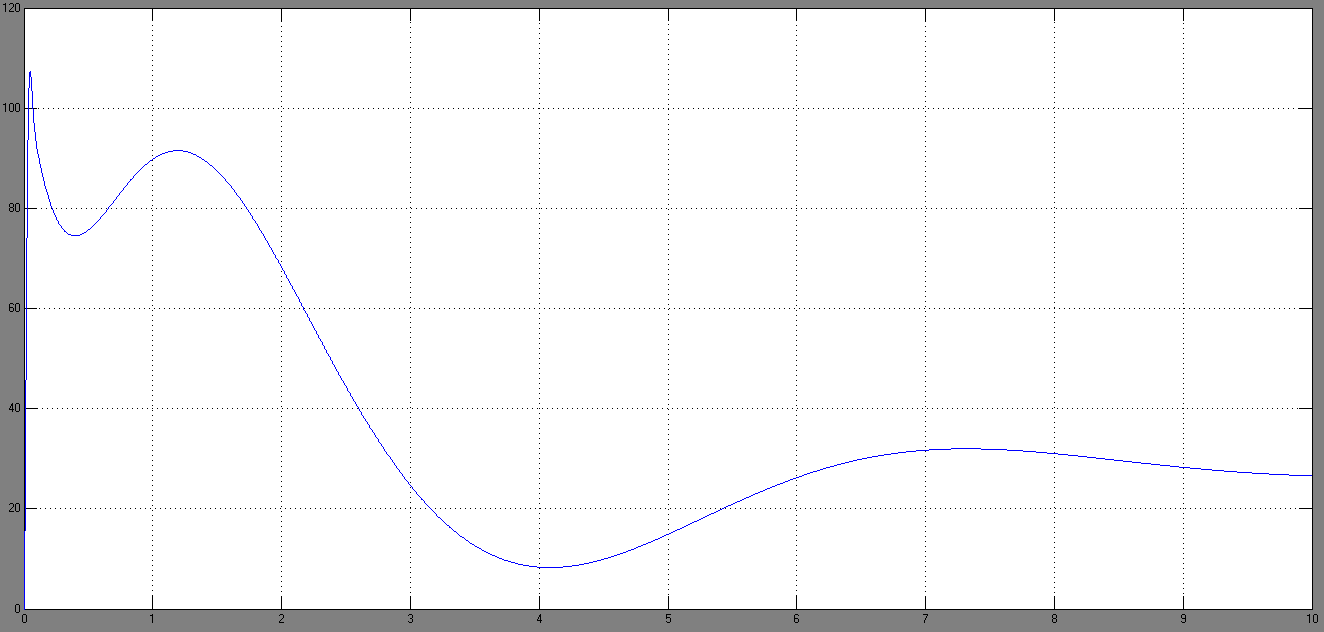
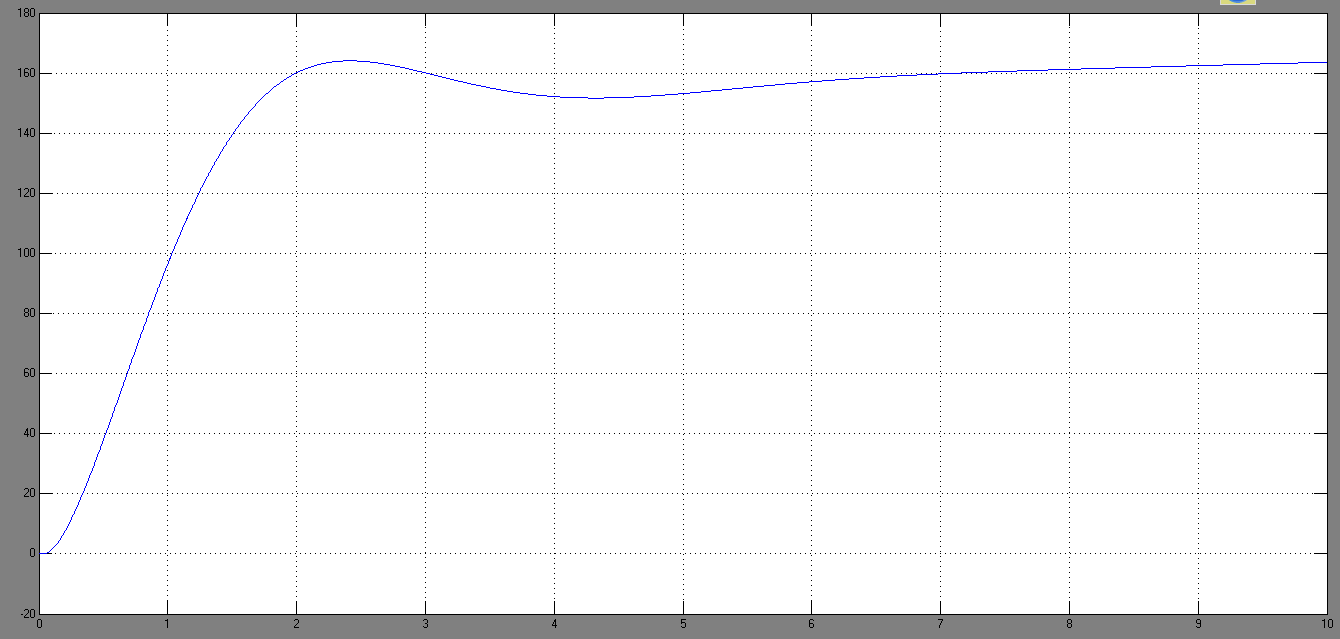
Рис.17 Переходные процесы тока и скорости в двухмассовой системе со стандартными настройками
Далее построим двухмассовую систему в нормированном виде. При этом учтём:






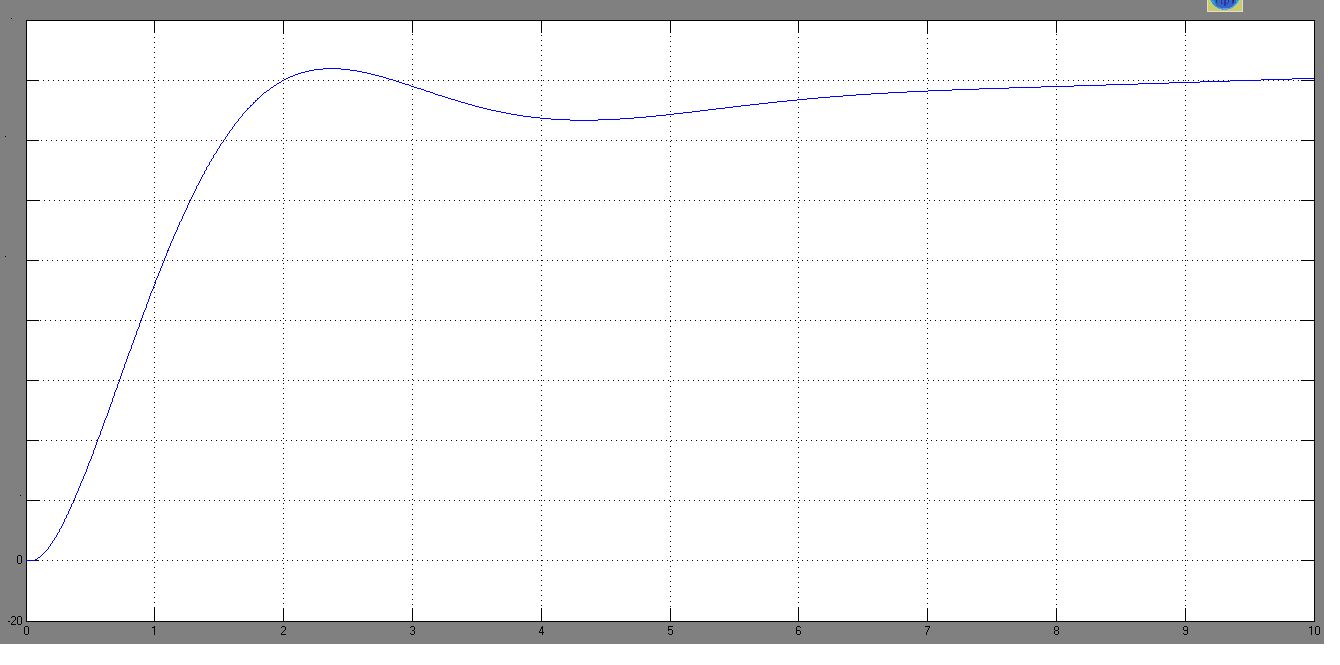
Рис.18 Переходные процессы в двухмассовой нормированной системе
9.2. Настройкаэлектромеханической системы с учётом упругости. Настройка двухмассовой системы без применения корректирующих устройств.
Проверяем возможность пренебрежения упругости при стандартных настройках для контура тока.
Условие определения соотношения параметров.
Условие №1 –
Условие №2:


 (9.1)
(9.1) 
 (9.2)
(9.2)
 ;
;
 (9.3)
(9.3)
где
 - нормированное значение сопротивления
цепи якоря;
- нормированное значение сопротивления
цепи якоря;
 -
электромеханическая постоянная времени;
-
электромеханическая постоянная времени;
 -
постоянная времени упругих колебаний.
-
постоянная времени упругих колебаний.
Условие:
 (9.4)
(9.4)
для
контура скорости не выполняется, т.к.
 .
.
Кроме того, выполняются условия (7.5) и (7.6) для контура тока
 (9.5)
(9.5)
 -коэффициент
собственного демпфирования системы.
-коэффициент
собственного демпфирования системы.
 (9.5)
(9.5)
Следовательно, для контура тока нельзя пренебречь влиянием упругости при стандартных настройках, а значит, невозможно пренебрегать влиянием упругости и для контура скорости.
Иные
настройки не подходят, т.к.

Проверяем условия реализации настроек, используя таблицу 3:
Таблица 3. Настройка П- или ПИ-регуляторов без применения корректирующих устройств.
|
Условия реализации настройки |
Настройка ПИ-регулятора тока |
Настройка П- или ПИ-регулятора скорости |
|
γ > 3÷3,5
Выполняются условия пренебрежения влиянием упругости на контур тока |
|
|
|
Выполняются условия пренебрежения влиянием упругости на контур тока |
Та же |
где,
|
|
|
|
|
|
|
|
|








 ,
,









Настройка №1:
 γ
> 3÷3,5(9.6)
γ
> 3÷3,5(9.6)
Данное
условие выполняется, так как у нас
 =3,14.
Проверяем выполнение условия
=3,14.
Проверяем выполнение условия
 (9.7)
(9.7)
 ;
(9.8)
;
(9.8)
 (9.9)
(9.9)
Кроме
того, используем вывод о применении 1
настройки при
 и
и ,
следовательно, для настройки регуляторов
тока и скорости применяем следущие
параметры:
,
следовательно, для настройки регуляторов
тока и скорости применяем следущие
параметры:
 (9.10)
(9.10)
 (9.11)
(9.11)
 (9.12)
(9.12)
 (9.13)
(9.13)
Система для моделирования в среде Matlab аналогична рис.19, с учётом настроек контуров тока и скорости. Графики переходных процессов представлены на рис.20

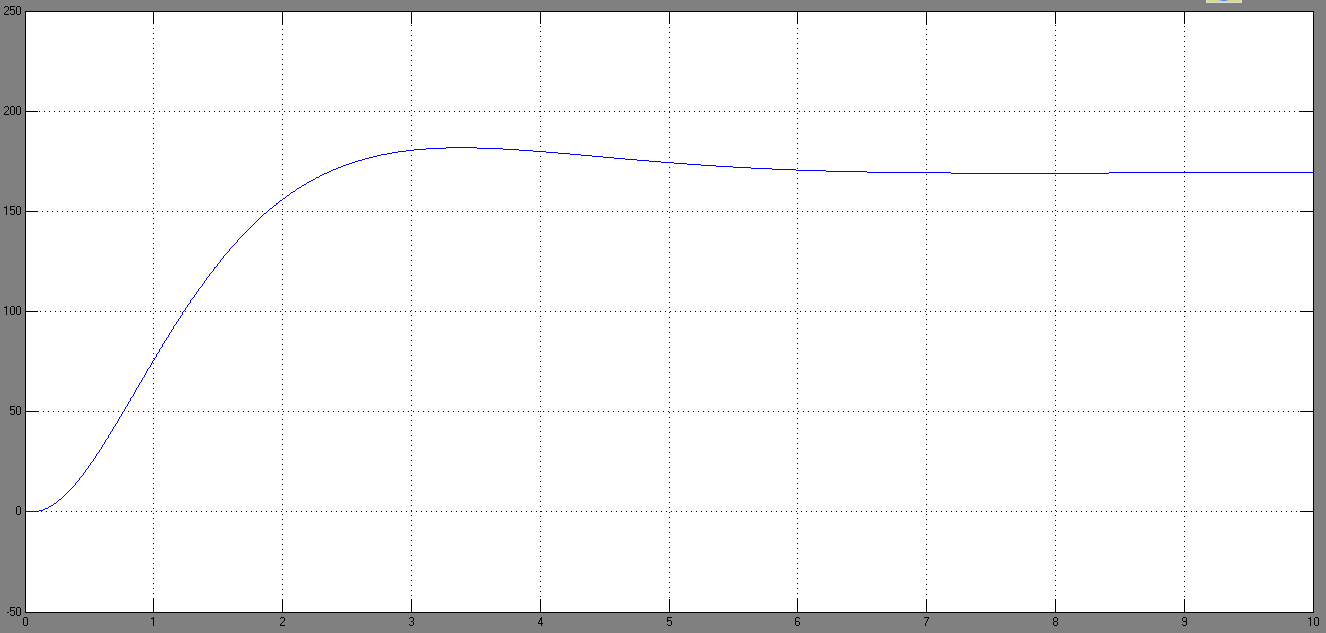
Рис.20 Графики переходных процессов для случая настройки двухмассовой системы без применения корректирующих устройств.
При этом, как видно из графика скорости, время переходного процесса увеличивается в сравнении с системой со стандартными настройками без учёта упругости.