

-
Оценка качества дискретных систем
Качество импульсных систем управления характеризуется такими же показателями, как и качество непрерывных систем: точностью в установившихся режимах, длительностью и перерегулированием переходного процесса.
Длительность
и перерегулирование
оценивают непосредственно по переходной
характеристике. Переходная характеристика
импульсной системы строится гораздо
проще, чем для непрерывной системы. Для
этого записывают
![]() -изображение
выходной величины при единичном
ступенчатом воздействии
-изображение
выходной величины при единичном
ступенчатом воздействии
-
Структура и характеристики цифровой системы управления.
Рассмотрим типичную функциональную структуру одноконтурной цифровой системы управления (рис. 9.12, а). АЦП квантует непрерывный сигнал по уровню и по времени и представляет его в цифровом коде. При этом образуется последовательность чисел , записанных в определенной (обычно двоичной) системе счисления. Цифровое вычислительное устройство ЦВУ в соответствии с заложенным в него алгоритмом выполняет над числами арифметические и логические операции и с периодом повторения , выдает в виде числа управляющий сигнал , формирует непрерывное управляющее воздействие .
Рис. 9.12. Функциональная (а) и алгоритмическая (б) структуры цифровой системы управления
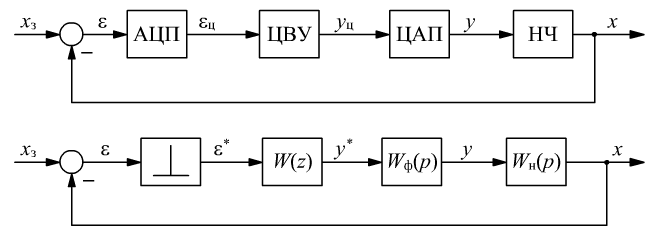
Если непрерывная часть системы и алгоритм работы ЦВУ линейны, то рассматриваемую цифровую систему можно исследовать как амплитудно-импульсную. Для этого систему с ЦВУ заменяют эквивалентной импульсной системой. На алгоритмической схеме эквивалентной системы (рис. 9.1) АЦП условно представляют в виде идеального импульсного элемента, а сигналы и , которые в действительности являются последовательностями чисел, заменяют соответствующими решетчатыми функциями и . Квантование по уровню при этом не учитывается (так как шаг квантования обычно достаточно мал).
Период повторения условного импульсного элемента определяется периодичностью опроса датчиков отдельных контуров (см. рис. 9.1), т. е. с темпом ввода сигналов в УВМ и вывода сигналов из УВМ, который задается от специального таймера через входной и выходной коммутаторы (мультиплексор и демультиплексор). Время, затрачиваемое ЦВУ на вычисления, обычно мало по сравнению с периодом , и его можно не учитывать.
Реализуемый в ЦВУ алгоритм преобразования входной последовательности чисел в выходную на эквивалентной схеме представляют в виде соответствующей д. п. ф. , которая связывает между собой дискретные значения сигналов и . Звено с передаточной функцией называют дискретным фильтром или цифровым регулятором.
Преобразователю ЦАП в эквивалентной системе соответствует фиксирующий элемент , который в течение одного такта сохраняет мгновенное значение .
Благодаря большим вычислительным возможностям УВМ в цифровых системах можно реализовать сложные алгоритмы управления и обеспечить такие переходные процессы, которые недостижимы в непрерывных системах.
-
Переменные состояния для дискретных систем.
-
Анализ дискретно-непрерывных систем методом пространства состояний: метод припасовывания, уравнения переходных состояний.