

49 Электромагниты переменного тока
Тяговая характеристика. Якорь ЭМ притягивается к сердечнику при подаче в обмотку как постоянного, так и переменного тока. Считая поток в магнитопроводе синусоидальным, что справедливо при синусоидальном напряжении на зажимах обмотки с пренебрежимо малым активным сопротивлением, по формуле Максвелла найдем выражение для тягового усилия:
г![]() де
Фδ - магнитный поток в воздушном зазоре;
S - поперечное��ечение
воздушного зазора; ω - круговая частота
питающего тока; (Qтmах = Ф2mах/(2μ0S) - амплитуда
тягового усилия, неизменного по знаку
и пульсирующего с удвоенной частотой
(рис. 15.5).
де
Фδ - магнитный поток в воздушном зазоре;
S - поперечное��ечение
воздушного зазора; ω - круговая частота
питающего тока; (Qтmах = Ф2mах/(2μ0S) - амплитуда
тягового усилия, неизменного по знаку
и пульсирующего с удвоенной частотой
(рис. 15.5).
Притяжение якоря определяется средним значением тягового усилия Qtmed, т.е. его постоянной составляющей (см. рис. 15.5, а).
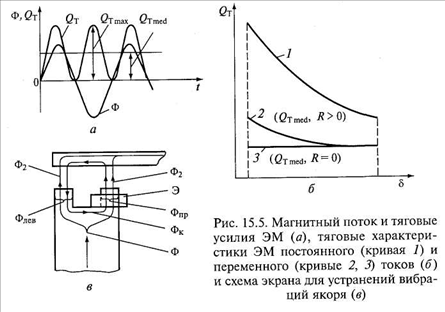 Разной
зависимостью от 8 объясняется различие
статических тяговых характеристик ЭМ
постоянного и переменного токов,
показанных на рис. 15.5, б. Если тяговая
характеристика 1 электромагнита
постоянного тока круто поднимается с
уменьшением δ, то тяговая характеристика
2 электромагнита, работающего на
переменном токе, более пологая из-за
роста индуктивности обмотки. Если R = 0,
то согласно второму закону Кирхгофа
приложенное к обмотке напряжение
уравновешивается только ЭДС самоиндукции
(е), т.е.
Разной
зависимостью от 8 объясняется различие
статических тяговых характеристик ЭМ
постоянного и переменного токов,
показанных на рис. 15.5, б. Если тяговая
характеристика 1 электромагнита
постоянного тока круто поднимается с
уменьшением δ, то тяговая характеристика
2 электромагнита, работающего на
переменном токе, более пологая из-за
роста индуктивности обмотки. Если R = 0,
то согласно второму закону Кирхгофа
приложенное к обмотке напряжение
уравновешивается только ЭДС самоиндукции
(е), т.е.
50 Поляризованные электромагниты
Принципиальное отличие поляризованных электромагнитов (ПЭМ) от нейтральных состоит в существовании зависимости между направлением перемещения якоря и полярностью управляющего напряженияUp, прикладываемого к рабочей обмотке. Эта зависимость достигается с помощью двух магнитных потоков: рабочего Фр, создаваемого постоянным напряжением, полярность которого может изменяться, и поляризующего Фп, образуемого постоянным магнитом или электромагнитом постоянного тока с неизменной полярностью питающего напряжения (рис. 15.6).
Повышенное быстродействие ПЭМ (несколько миллисекунд) по сравнению с нейтральными ЭМ достигается не только конструктивными приемами (шихтованным магнитопроводом, небольшими ходом и массой якоря, малой постоянной времени обмотки), но и связано непосредственно с его принципом действия: при срабатывании и отпускании поток в магнитопроводе не возникает и не исчезает, а перераспределяется или изменяет свое значение. Еще одна особенность ПЭМ, обусловленная наличием постоянного магнита, заключается в возможности принятия якорем различных фиксированных положений при обесточенной рабочей обмотке.
Р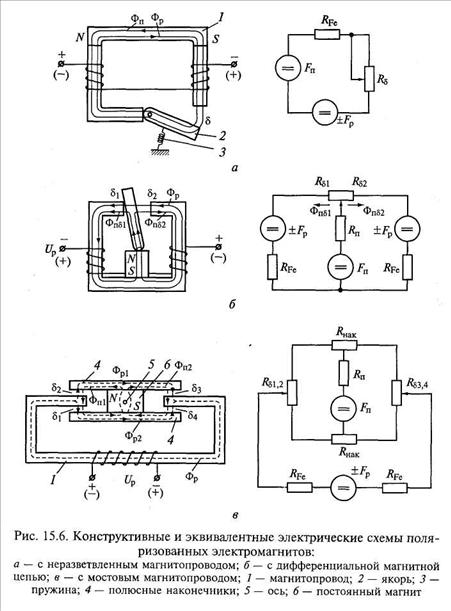 азличают
три основные конструктивные схемы
магнитопроводов ПЭМ: последовательную,
параллельную (дифференциальную) и
мостовую.
азличают
три основные конструктивные схемы
магнитопроводов ПЭМ: последовательную,
параллельную (дифференциальную) и
мостовую.
Схема ПЭМ с последовательной магнитной цепью, в которой рабочий поток Фр, создаваемый током рабочей обмотки, и поляризующий поток Фп постоянного магнита замыкаются в общем простом неразветвленном магнитопроводе 1, показана на рис. 15.6, а вместе с его схемой замещения (в схеме замещения предполагается, что магнитная цепь не насыщена). При встречном действии потоков Фр и Фп якорь 2 оттянут пружиной 3. Изменение полярности рабочего напряжения вызывает притяжение якоря к сердечнику.