

3. Расчет и построено, кривых переходных процессов
3.1. Общие положения
Переходным процессом или режимом называется режим работы электропривода при переходе от одного установившегося состояния к другому, сопровождающийся изменением его частоты вращения, тока и момента.
Уравнение равновесия электропривода в этом случае имеет вид:
![]() (3.1),
(3.1),
где М - момент двигателя.
Целью анализа переходных процессов является определение их основных показателей, а именно:
- времени процесса;
- его характера: экспотенциальный, колебательный, затухающий, незатухающий;
- перерегулирования и т.д.
Мгновенному изменению скорости и тока двигателя препятствует наличие электромеханической и электромагнитной инерции привода, которые характеризуются электромеханической Tм и электромагнитной Tэ постоянными времени, соответственно:
Tм = J * R / C2 (3.2)
Tэ = L / R (3.3)
где L, R - индуктивное и активное сопротивления рассматриваемой цепи.
Если Tм >> Tя , где Tя - электромагнитная постоянная времени якорной цепи, то электромагнитной постоянной времени можно пренебречь, то Tэ = Tя 0 (3.4), тогда переходной процесс называется электромеханическим.
Рассмотрим методики расчета переходных процессов в различных системах электропривода.
3.2. Расчет кривых электромеханических переходных процессов
Рассматриваемая ниже методика может быть применена в тек случаях, когда электродвигатель питается от сети, имеет линейную механическую характеристику или работает на линейном участке нелинейной характеристики при Mс = const. Как указывалось выше Tя 0.
В этом случае электропривод описывается следующей системой уравнений:

 (3.5)
(3.5)
Отсюда после преобразований получаем уравнения для расчета кривых скорости и момента:
![]() (3.6)
(3.6)
![]() (3.7)
(3.7)
где
уст, Mуст - установившиеся значения частоты вращения и момента двигателя;
нач, Mнач - начальные значения частоты вращения и момента двигателя.
Если двигатель
или (и) рабочий механизм имеют нелинейные
механические характеристики, т.е.
динамический момент:
![]() (3.8) зависит от скорости нелинейно, то
для расчета электромеханических
переходных процессов используются
графоаналитические методы - чаще всего
метод площадей или метод пропорций.
(3.8) зависит от скорости нелинейно, то
для расчета электромеханических
переходных процессов используются
графоаналитические методы - чаще всего
метод площадей или метод пропорций.
3.3. Расчеты переходных процессов в системе г-д
Схема системы Г-Д, приведенная на рис.3.1 характеризуется тремя постоянными времени:
|
- электромагнитная постоянная времени обмотки возбуждения генератора |
|
- электромеханическая постоянная времени привода |
|
- электромагнитная постоянная времени якорной цепи |
LВ , LЯ |
- индуктивные сопротивления обмотки возбуждения генератора и якорной цепи двигателя |
RВ , RЯ |
- активные сопротивления обмотки возбуждения генератора и якорной цепи двигателя |
Из них Tя является наименьшей. Поэтому при расчетах переходных процессов в разомкнутой системе Г-Д этой постоянной времени обычно пренебрегают, т.е. считается, что Tя 0.
Для уменьшения времени переходных процессов в системе Г-Д применяется форсировка с отсечкой, т.е. генератор работает на линейном участке кривой намагничивания и его ЭДС eг пропорционально его току iв возбуждения eг iв (3.9.).
Таким образом» расчет переходных процессов в разомкнутой системе Г-Д производится при условиях:
Tя 0
eг iв
Тогда система Г-Д описывается следующими уравнениями:

 (3.10),
(3.10),
где Uв, eг напряжение возбуждения и ЭДС генератора.
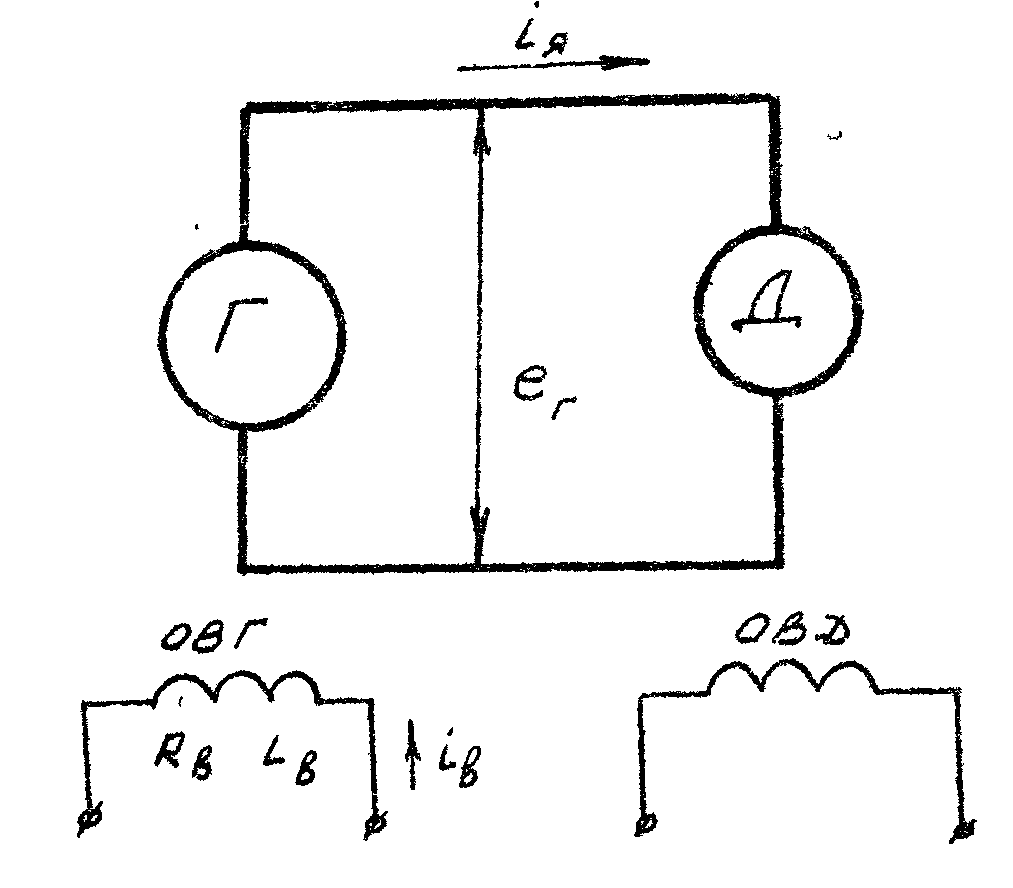
Рис.3.1. Схема Г-Д.
 ,
,
Рис.3.2. Оценка качества переходных процессов
После преобразований и решения дифференциальных уравнений получаем:
![]() (3.11)
(3.11)
![]() (3.12)
(3.12)
 (3.13)
(3.13)
 (3.14)
(3.14)
Так как в соответствии с принятыми допущениями, системе характеризуется двумя постоянными времени Tв и Tм, то процесс носит колебательный характер. Время tmax, когда ток имеет максимальное значение, определяется из уравнения:
![]() (3.15)
(3.15)
![]() (3.16), где
(3.16), где
![]()
Эти уравнения действительны для расчета всех переходных процессов в системе Г – Д. Однако необходимо помнить, что начальные и установившиеся значения частот вращения и токов двигателя зависят от типа статического момента и могут изменяться в процессе пуска, торможения и реверса. Т.е. любой переходной процесс в системе Г-Д может состоять из следующих этапов, характеризующимися собственными величинами уст, нач, Iя уст, Iя нач. В таких случаях для каждого этапа в (3.11) - (3.14) подставляется собственные, соответствующие данному этапу, значение начальных и установившихся частот вращения и токов якоря.