

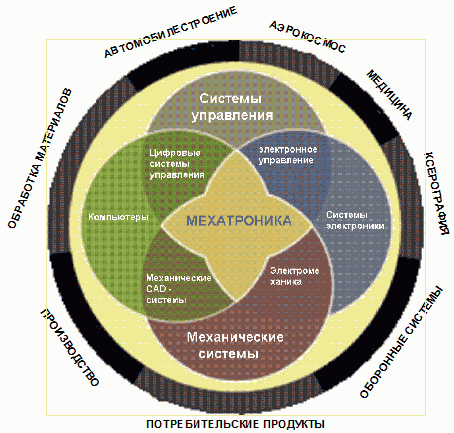
Мехатроника — это область науки и техники, посвященная созданию и эксплуатации машин и систем с компьютерным управлением движением, которая базируется на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов.
О термине
Термин состоит из двух частей — «меха», от слова механика, и «троника», от слова электроника. В СССР до возникновения термина «мехатроника» применялись приборы с названием «механотроны». Термин «мехатроника» введён японцем Тецуро Мориа (Tetsuro Moria), старшим инженером компании Yaskawa Electric, в 1969 году. Сначала данный термин был торговой маркой (зарегистрирована в 1972 году), но после его широкого распространения компания отказалась от его использования в качестве зарегистрированного торгового знака. Несмотря на наличие стандартного определения, мехатроника остаётся несколько спорным понятием. Часто этот термин употребляют в значении электромеханика, что является спорным, но допустимым. Мехатроника широко используется на современных заводах по производству плат SMT методом.
Связанные понятия
Стандартное определение (1995):
Мехатронный модуль — это функционально и конструктивно самостоятельное изделие для реализации движений с взаимопроникновением и синергетической аппаратно-программной интеграцией составляющих его элементов, имеющих различную физическую природу. К элементам различной физической природы относят механические, электротехнические, электронные, цифровые, пневматические, гидравлические, информационные и т. д. компоненты. Мехатронная система — совокупность нескольких мехатронных модулей и узлов, синергетически связанных между собой, для выполнения конкретной функциональной задачи. Обычно мехатронная система является объединением собственно электромеханических компонентов с силовой электроникой, которые управляются с помощью различных микроконтроллеров, ПК или других вычислительных устройств. При этом система в истинно мехатронном подходе, несмотря на использование стандартных компонентов, строится как можно более монолитно, конструкторы стараются объединить все части системы воедино без использования лишних интерфейсов между модулями. В частности, применяя встроенные непосредственно в микроконтроллеры АЦП, интеллектуальные силовые преобразователи и т. п. Это уменьшает массу и размеры системы, повышает ее надёжность и дает некоторые другие преимущества. Любая система, управляющая группой приводов может считаться мехатронной. Иногда система содержит принципиально новые с конструкторской точки зрения узлы, такие как электромагнитные подвесы, заменяющие обычные подшипниковые узлы. К сожалению, такие подвесы дороги и сложны в управлении и в нашей стране применяются редко (на 2005 г.). Одной из областей применения электромагнитных подвесов являются турбины, перекачивающие газ по трубопроводам. Обычные подшипники здесь плохи тем, что в смазку проникают газы — она теряет свои свойства.
Мехатроника сегодня
Вообще, многие современные системы являются мехатронными или используют идеи мехатроники, поэтому постепенно мехатроника становится «наукой обо всём». Мехатроника применяется во многих отраслях и направлениях, например: робототехника, авиационная и космическая техника, медицинское и спортивное оборудование, бытовая техника.
Примеры мехатронных систем
Типичная мехатронная система — тормозная система автомобиля с АБС (антиблокировочной системой).
Персональный компьютер также является мехатронной системой: ЭВМ содержит много мехатронных составляющих: жёсткие диски, оптические приводы.
Мехатронные системы |
Одной из основных тенденций развития современного машиностроения является внедрение в технологический процесс производства мехатронных технологических машин и роботов. Мехатронный подход в построении машин нового поколения заключается в переносе функциональной нагрузки от механических узлов к интеллектуальным компонентам, которые легко перепрограммируются в новую задачу и при этом являются относительно дешевыми. Мехатронный подход к проектированию предполагает не расширение, а именно замещение функций, традиционно выполняемых механическими элементами системы на электронные и компьютерные блоки. Понимание принципов построения интеллектуальных элементов мехатронных систем, методов разработки алгоритмов управления и их программной реализации является необходимым условием для создания и внедрения мехатронных технологических машин. Предлагаемое методическое руководство относится к учебному процессу по специальности «Применение мехатронных систем», предназначены для изучения принципов разработки и реализации алгоритмов управления мехатроннымх систем на базе электронных и компьютерных блоков и содержат информацию по проведению трех лабораторных работ. Все лабораторные работы объединены в единый комплекс, целью которого является создание и реализация алгоритма управления мехатронной технологической машины. Вначале каждой лабораторной работы обозначена конкретная цель, затем следует ее теоретическая и практическая части. Все работы проводятся на специализированном лабораторном комплексе. Основной тенденцией в развитии современной промышленности являются интеллектуализация производственных технологий на базе использования мехатронных технологических машин и роботов. Во многих областях промышленности мехатронные системы (МС) приходят на смену традиционным механическим машинам, которые уже не соответствуют современным качественным требованиям. Мехатронный подход в построении машин нового поколения заключаются в переносе функциональной нагрузки от механических узлов к интеллектуальным компонентам, которые легко перепрограммируются под новую задачу и при этом являются относительно дешевыми. Мехатронный подход к проектированию технологических машин предполагает замещение функций, традиционно выполняемых механическими элементами системы на электронные и компьютерные блоки. Еще в начале 90-х годов прошлого века подавляющее большинство функций машины реализовывалось механическим путем, в последующие десятилетие происходило постепенное вытеснение механических узлов электронными и компьютерными блоками. В настоящее время в мехатронных системах объем функций распределен между механическими, электронными и компьютерными компонентами практически поровну. К современным технологическим машинам предъявляются качественно новые требования:
Все эти требования, возможно, выполнить только с использованием мехатронных систем. Мехатронные технологии включены в число критических технологий Российской Федерации. В последние годы создание технологических машин четвертого и пятого поколений с мехатронными модулями и интеллектуальными системами управления получило развитие и в нашей стране. К таким проектам следует отнести мехатронный обрабатывающий центр МС-630, обрабатывающие центры МЦ-2, Гексамех-1, робот-станок РОСТ-300. Дальнейшее развитие получили мобильные технические роботы, которые могут самостоятельно передвигаться в пространстве и обладают способностью выполнять технологические операции. Примером таких роботов могут служить роботы для применения в подземных коммуникациях: РТК-100, РТК-200, РТК «Рокот-3». К главным преимуществам мехатронных систем относятся:
Примером такой системы может служить система регулирования силового взаимодействия рабочего органа с объектом работ при механообработке, управление технологическими воздействиями (тепловыми, электрическими, электрохимическими) по объекту работ при комбинированных методах обработки; управление вспомогательным оборудованием (конвейерами, загрузочными устройствами). В процессе движения механического устройства рабочий орган системы непосредственно воздействует на объект работ и обеспечивает качественные показатели выполняемой автоматизированной операции. Таким образом, механическая часть является в МС объектом управления. В процессе выполнения МС функционального движения внешняя среда оказывает возмущающее воздействие на рабочий орган, который является конечным звеном механической части. Примерами таких воздействий могут служить силы резания в операциях механообработки, контактные силы и моменты сил при формообразовании и сборке, сила реакции струи жидкости при операции гидравлической резки. Кроме рабочего органа в состав МС входит блок приводов, устройств компьютерного управления, верхним уровнем для которого является человек-оператор, либо другая ЭВМ, входящая в компьютерную сеть; сенсоры, предназначенные для передачи в устройство управления информации о фактическом состоянии блоков машины и движении МС. Устройство компьютерного управления выполняет следующие основные функции:
|