

Вектор. Линейные операции над векторами.


Вектор – это направленный отрезок, т.е. отрезок с указание точек начала и конца. Вектор обозначается AB или а . Линейные операции над векторами: сложение, вычитание векторов, и умножение вектора на число.
Сложение:
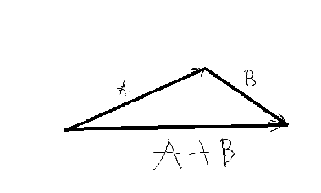
По правилу треугольника. Пусть А и В два вектора. Совместим путём параллельного переноса начала вектора В с концом вектора А. Тогда вектор, идущий из начала А в конец В называется суммой векторов А, В.
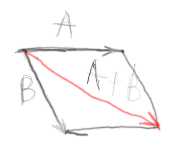
По правилу параллелограмма:
Отложить А и В из одной точки и построить параллелограмм. Тогда суммой А+В будет вектор диагонали.
По правилу многоугольника(«треугольник» для большего кол-ва чем два вектора):
Начало каждого следующего вектора совмещаю с концом предыдущего. Суммой этих векторов, будет вектор, соединяющий начало первого вектора с концом последнего вектора.

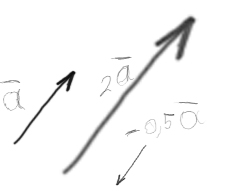
Произведение вектора А на число µ называется вектор µА равный вектору С длина которого |µА|=| µ |*| А |, а направление зависит от знака числа µ:
С и А сонаправлены, если число больше нуля.
С и А противоположно направлены , если число меньше нуля.
Если С равен нулю, то число равно нулю.
Вектор
(-1)*А= - А называется противоположным к
А. Вектор
 имеет единичную длину, он одиноково
направлен с вектором а, его называют
ортом вектора а и обозначают
имеет единичную длину, он одиноково
направлен с вектором а, его называют
ортом вектора а и обозначают
![]()
Разность векторов – это сумма вектора А и вектора, противоположному вектору В, т.е. А-В=А+(-В).
Линейно зависимая и линейно – независимая система векторов. Теорема о линейной зависимости двух векторов. Сформулировать теорему о линейной зависимости трёх векторов.
Векторы![]() называются линейно зависимыми, если
существуют числа
называются линейно зависимыми, если
существуют числа
![]() ,
не равные нулю, такие, что
,
не равные нулю, такие, что
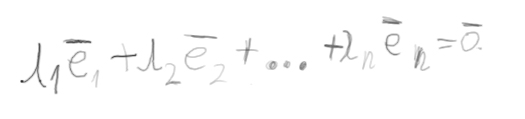
Если это соотношение возможно только при числах равных нулю, то векторы называются линейно зависимыми.
Два вектора линейно независимы, тогда и только тогда, когда они неколлинеарны.
Векторы линей зависимы, тогда и только тогда, когда хотя бы один из них линейно выражается через другие. Любой вектор в R2 можно «разложить по базису», представить в виде линейной комбинации. Любые 3 вектора в R2
линейно зависимы .
Проекция вектора на ось. Свойства проекций.
Проекцией вектора АВ на ось L называется число ПрLАВ, равно +- |A1В1|, где А1, В1 – проекции точек А, В соответственно; знак «+» берётся, если направление A1В1 совпадает с направлением оси, знак «-» берётся, если эти направления противоположны.

Св-во 1:
Если векторы равны, то равны и их проекции
Св-во 2:
ПрLА=|А|*cos(a), где а – угол между вектором а и осью L.
Св-во 3:
Базис в пространстве. Ортонормированный базис. Прямоугольная декартова система координат. Координаты вектора.
Базис в пространстве — любые три некомпланарных вектора, взятых в определенном порядке.
Ортонормированный базис – это базис, состоящий из перпендикулярных друг другу векторов, длина которых равна 1.
Прямоугольная декартова система координат на плоскости определяется точкой О(началом координат) и ортонормированным базисом I,j. Прямые, проходящие через начало координат в направление базисных векторов называются координатными осями(соответственно ОХ –ось абцисс, OY – ось ординат).
Любой вектор можно разложить по базису А=[число]*i+[число]*j.
Например, если у вектора А первая координата 2, а вторая 3, то можно записать:
А=2i+3j или А=(2,3).