

4.10.2 Кинематика подъемных систем
Графическое изображение изменения скорости подъемных сосудов в зависимости от времени называется диаграммой скорости подъема.
Заданными для определения элементов диаграммы скорости являются: расчетная продолжительность движения подъемных сосудов Тр (с); путь (высота) подъема H — расстояние от нижней до верхней приемной площадки, причем при скиповом подъеме нижней приемной площадке соответствует уровень загрузки скипа в зумпфе, м; ускорение a1, согласно ПТЭ, при спуске и подъеме людей принимается не более 1 м/с2; для грузовых подъемов величина ускорения определяется проектом; замедление а3 не должно превышать 0,75 м/с.
Трехпериодные диаграммы скорости и ускорения (рис. 43) применяют при клетевом подъеме.
1 Максимальная скорость подъема. Путь подъемных сосудов за время одной подъемной операции складывается из путей h1, h2 и h3, пройденных сосудами соответственно за время ускоренного t1 равномерного t2 и замедленного t3 движения, т.е.
H = h1+h2+h3 (45)
Выразив
путь через максимальную расчетную
скорость
![]() и продолжительности движения t1,
t2
и t3,
имеем:
и продолжительности движения t1,
t2
и t3,
имеем:
![]() .
.
Так как продолжительность движения подъемных. сосудов за время одной подъемной операции Tp=t1+t2+t3, то
Следовательно,
![]() (46)
(46)
Обозначим
![]() (47)
(47)
откуда модуль ускорений (м/с )
![]() (48)
(48)
Далее на основании (46) — (48)
![]()
и окончательно (м/с)
![]() (49)
(49)
По
данным о подъемных машинах определяют
фактическую максимальную скорость
![]() подъемных сосудов, причем для обеспечения
заданной производительности необходимо,
чтобы vmax
≥ vpm.
подъемных сосудов, причем для обеспечения
заданной производительности необходимо,
чтобы vmax
≥ vpm.
2 Продолжительность (с) и путь (м) ускоренного движения
![]() (50)
(50)
![]() (51)
(51)
3 То же, замедленного движения
![]() (52)
(52)
![]() (53)
(53)
4
Путь
![]() и продолжительность равномерного
движения
и продолжительность равномерного
движения
h2= H-h1-h3 (54)
![]() (55)
(55)
5 Продолжительность движение подъемных сосудов (с)
T=t1+t2+t3 (56)
С другой стороны, если в формулу (56) подставить t1 и t3 с (40) и (42), а вместо t2 — его значение из (55), то
![]() (57)
(57)
При правильном расчете величина T по формулам (56) и (57) одинаковая.
Формула (57), так же как и приводимые ниже формулы (73) и (80), используют не только для проверки правильности расчета диаграмм скорости, но и для определения в эксплуатируемых установках величины Т, что необходимо при пребывании возможной пропускной способности подъемной установки.
Так как vmax ≥ vpm, то Т ≤ Тр, и поэтому фактический коэффициент резерва производительности подъемной установки будет равной или большее расчетного.
![]() (58)
(58)
Пятипериодные диаграммы скорости и ускорения (Рис. 44) применяют при подъеме в неопрокидных скипах.
Наличие первого и пятого периодов в диаграмме скорости объясняется тем, что для уменьшения динамической погрузки на разгрузочные кривые, разгрузочный ролик и затвор скипа при движении скипа при ходе ролика по разгрузочным кривым должно быть с пониженным ускорением а' и замедлением а".
Рис.
44 - Пятипериодные
диаграммы
скорости (а) и ускорения(б)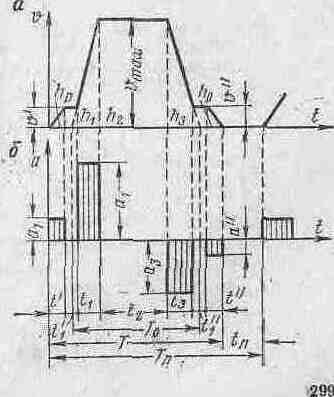
Расчет элементов пятипериодной диаграммы скорости производят так же, как и трехпериодной диаграммы, но с учетом дополнительных периодов движения подъемных сосудов. В самом деле, можно, иметь трапецеидальную диаграмму с основанием Т0. Площади треугольников abc и a'b'c' представляют путь hP рамы скипа (путь разгрузки) за время движения ролика соответственно порожнего и груженого скипа в разгрузочных кривых.
1 Максимальная скорость подъема (м/с)
![]() (59)
(59)
г
(60)
![]()
![]()
(61)
В соответствии с данными подъемных машин определяют фактическую максимальную скорость υmax, причем, υmax ≥ υр.м.
2 Ускорение а' (м/с2) и продолжительность t” - (с) движения порожнего скипа при ходе ролика его по разгрузочным кривым
![]() (62)
(62)
![]() (63)
(63)
3 Замедление а" (м/с2) и продолжительность t" (с) движения груженого скипа при ходе ролика его по разгрузочным кривым
![]() (64)
(64)
![]() (65)
(65)
4 Продолжительность t1 (с) в путь h1; (м) движения скипа с ускорением a1
![]() (66)
(66)
![]() (67)
(67)
5 То же, tз и hэ — с замедлением a3.
![]() (68)
(68)
![]() (69)
(69)
6 Путь hm (м) и продолжительность t2, (с) равномерного движения
h2=H-2hp-h1-h3 (70)
(71)
7 Продолжительность движения подъемных сосудов (с)
T=t’+t1+t2+t3+t “ (72)
С другой стороны, аналогично формуле (57) .
![]() (73)
(73)
Семипериодную диаграмму скорости и ускорения (рис. 45) применяют при опрокидных подъемных сосудах. Равномерное движение подъемного сосуда во время хода его ролика по разгрузочным кривым и схода его с этих кривых необходимо для того, чтобы избежать динамических нагрузок на разгрузочные кривые и ролик, это особенно важно при опрокидных сосудах, когда по разгрузочным кривым двигается значительная масса полезного груза и кузова сосуда. Значение ускорений и скоростей при этом те же, что и для пятипериодной диаграммы скорости с той только разницей, что скорость порожнего сосуда при выходе его ролика из разгрузочных кривых может быть v’ = 2,5 м/с.
Такую же диаграмму скорости применяют и при проходческих подъемных установках, при этом hp — путь нагруженной и пустой бадей при их движении не по проводникам (от забоя до предохранительного полка).
1 Максимальную скорость подъема, модуль ускорений и путь H0 определяют соответственно по формулам (59), (58) и (60), причем
To
=
Tp
-
t'
-
t'1
-
t''1
- t''
+![]() (74)
(74)
![]() (75)
(75)
 (76)
(76)
![]() (77)
(77)
 (78)
(78)
В соответствии с данными подъемных машин определяют фактическую максимальную скорость vmax, причем vmax ≥ vpm.
2 Величины t1 и h1; t2 и h2; t3 и h3 находят по соответствующим формулам пятипериодной диаграммы скорости.
3 Продолжительность движения подъемных сосудов (с)
T = t'' + t1' + t1 + t2 + t3 + t1'' + t'' (79)
С другой стороны, аналогично формуле (57)
![]() (80)
(80)
причем H0 предварительно находится по формуле (60).
Д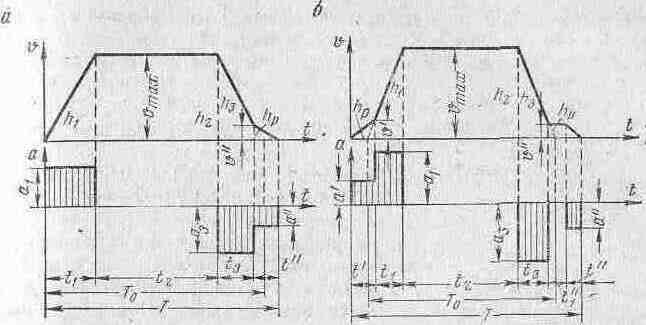 ля
уменьшения времени ускоренного движения,
а следовательно, и общей продолжительности
подъемной операции при неопрокидных
скипах можно применять четырехпериодные
диаграммы скорости и ускорения
(рис. 46, а), а при опрокидных сосудах
шестипериодные диаграммы (рис. 46, б).
Шестипериодную диаграмму применяют
для неопрокидных скипов при управлении
установкой с периодом дотяжки
ля
уменьшения времени ускоренного движения,
а следовательно, и общей продолжительности
подъемной операции при неопрокидных
скипах можно применять четырехпериодные
диаграммы скорости и ускорения
(рис. 46, а), а при опрокидных сосудах
шестипериодные диаграммы (рис. 46, б).
Шестипериодную диаграмму применяют
для неопрокидных скипов при управлении
установкой с периодом дотяжки
![]() ,
если
,
если
![]() = υ доп ≤
0,5 м/c
= υ доп ≤
0,5 м/c
Рис. 46 - Четырехпериодная (а) и шестипериодная (б) диаграммы скорости и ускорение