

Выбираем асинхронный электродвигатель серии mtFс фазным ротором:
|
Тип двигателя
|
Рном, кВт
|
nном, об/мин |
cosном
|
ном, %
|
I2, А
|
U2ф, В
|
Jp, кгм2
|
|
MTF512-6 |
55 |
960 |
0,79 |
88 |
105 |
340 |
1,03 |
2.2. Выбор схемы электропривода для заданного механизма.
Для механизма подъема с асинхронным фазным электродвигателем МТF512-6 выбираем электропривод с кулачковым контроллером ККТ61 (рис.1).
На схеме рис. 1 контакты SM2, SM4, SM6иSM8контроллера выполняют реверс двигателя, контактыSM7иSM9 — SM12коммутируют ступени резисторов, контактыSM1, SM3иSM5использованы в цепях защиты. Одновременно с двигателем включается катушка тормоза УА. В схеме с контроллером ККТ61 в целях уменьшения числа используемых кулачков применено несимметричное включение сопротивлений.
Защита электропривода осуществляется защитной панелью, на которой находятся линейный контактор КММ,силовой рубильникQS, предохранителиFU1, FU2и блок максимальных релеКА.Конечная защита осуществляется выключателямиSQ2иSQ3.В цепь катушки контактораКММвключены контакты кнопки включенияSB,аварийного выключателяSAи контакты блокировки люкаSQ1.
Р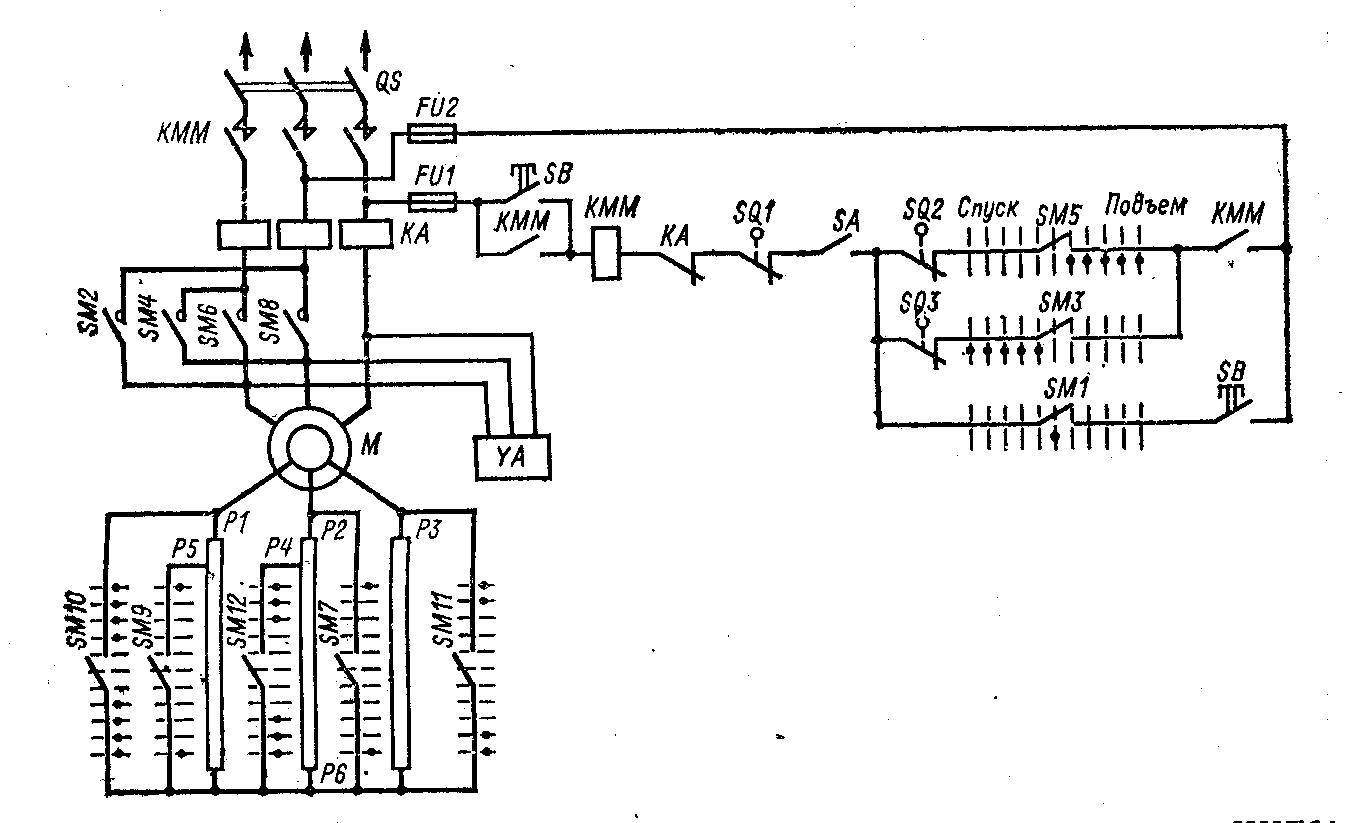 ис.
2. Схема электропривода подъема с
кулачковым контроллером ККТ61
ис.
2. Схема электропривода подъема с
кулачковым контроллером ККТ61
2.3. Выбор пуско-тормозных и регулировочных резисторов
Частоту вращения магнитного поля асинхронного двигателя определяем по формуле:
![]() (2.8)
(2.8)
где f– частота тока,f=50 Гц;
р – число пар полюсов, р=3.
![]() об/мин.
об/мин.
Определяем номинальное скольжение ротора:
![]() , (2.9)
, (2.9)
![]() .
.
Определяем номинальный момент электродвигателя по формуле:
![]() (2.10)
(2.10)
![]() Н.м.
Н.м.
Определяем критическое скольжение по формуле:
 , (2.11)
, (2.11)
Строим механическую характеристику, n2=f(M), по формуле Клосса:
![]() (2.12)
(2.12)
Частоту вращения вала электродвигателя определяем по формуле:
![]() (2.13)
(2.13)
Составляем таблицу с данными для построения зависимости n2=f(M).
|
S |
0 |
0,04 |
0,36 |
0,5 |
0,6 |
0,7 |
0,8 |
1 |
|
n |
1000 |
960 |
640 |
500 |
400 |
300 |
200 |
0 |
|
M |
0 |
560,4 |
1500 |
1260 |
1109,6 |
984,5 |
881,6 |
725,2 |
По данным таблицы строим механическую характеристику двигателя (рис.3.)
Определяем момент переключения:
![]() (2.14)
(2.14)
![]() Н.м.
Н.м.
Определяем максимальный пусковой момент:
![]() (2.15)
(2.15)
![]() Н.м.
Н.м.
Рассчитываем сопротивления пуско-регулировочного и тормозного реостата.
Определяем активное сопротивление фазы ротора по формуле:
 (2.16)
(2.16)
где I2– сила тока ротора,I2=15,7 А.
с- угловая скорость вращения магнитного поля двигателя, которую определяем по формуле:
![]() (2.17)
(2.17)
![]() 1/с.
1/с.
Подставляем численные значения в формулу (2.16):
![]() Ом.
Ом.
Определяем пусковые добавочные сопротивления:
 (2.18)
(2.18)
![]() Ом.
Ом.
 (2.19)
(2.19)
![]() Ом.
Ом.
Определим сопротивление тормозного реостата:
![]() (2.20)
(2.20)
![]() Ом.
Ом.
Р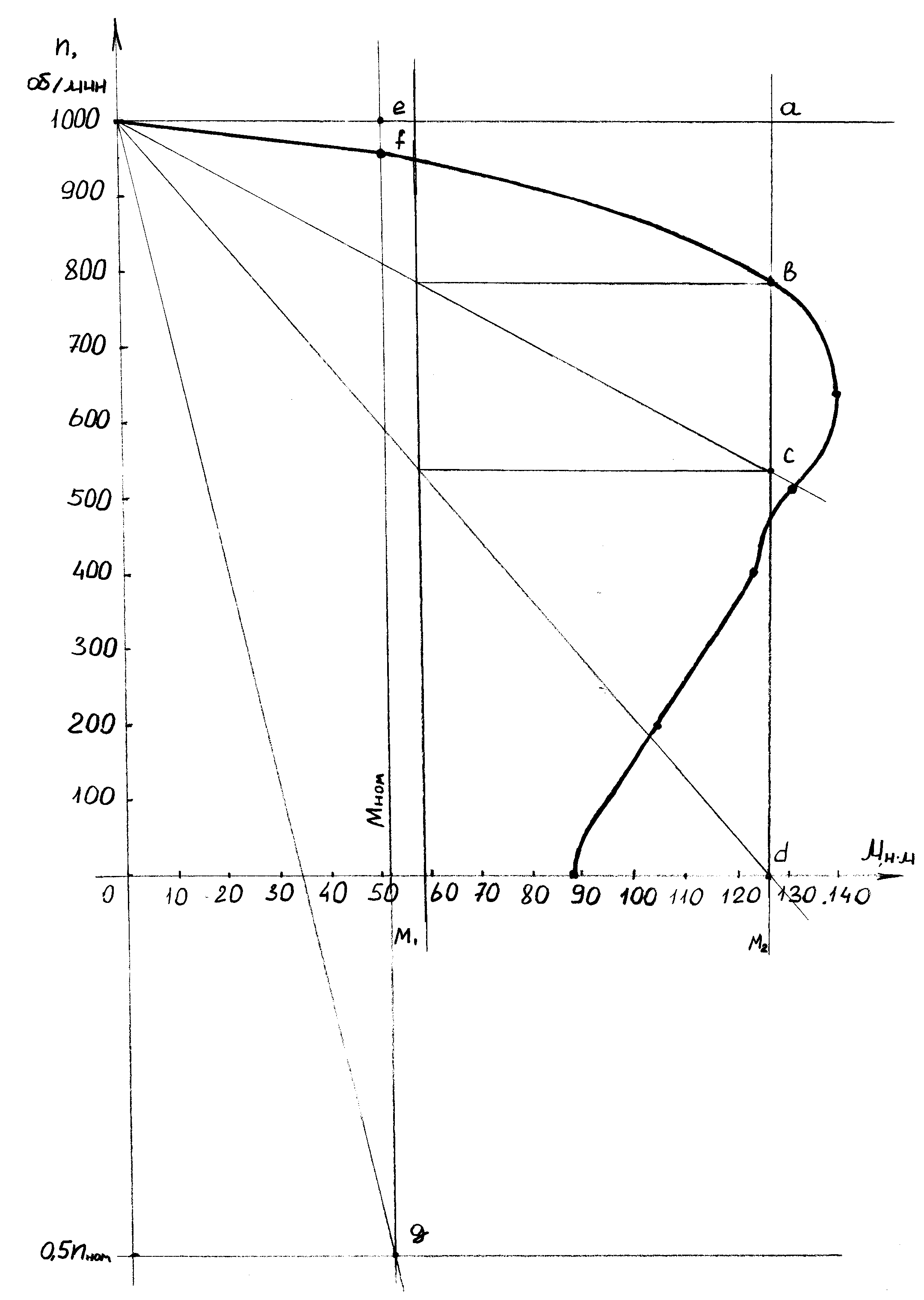 ис.3.
Механическая характеристика двигателя.
ис.3.
Механическая характеристика двигателя.