

курсовые работы / курсовая работа по организации эвм (mcs 51, скорубский) / Отчет / Курсовая
.pdfКафедра Вычислительной Техники СПбГУ ИТМО
Содержание |
|
Введение ............................................................................................................................................... |
3 |
Часть 1. Описание схемы .................................................................................................................... |
4 |
Шинная организация........................................................................................................................ |
4 |
Иерархический принцип.................................................................................................................. |
4 |
Синхронизация ................................................................................................................................. |
4 |
Система прерываний........................................................................................................................ |
4 |
Микрокомандное управление ......................................................................................................... |
5 |
Часть 2. Вспомогательное программное обеспечение. .................................................................... |
7 |
Ассемблер микрокоманд ................................................................................................................. |
7 |
Симулятор (модель) процессора..................................................................................................... |
7 |
Литература ............................................................................................................................................ |
9 |
Приложение №1. Иерархия блоков ЭВМ. ....................................................................................... |
10 |
Приложение №2. Описание формата микрокоманд. ...................................................................... |
11 |
Приложение №3. Полный код микропрограммы. .......................................................................... |
15 |
Приложение №4. Исходный код ассемблера микрокоманд и сопутствующих утилит. ............. |
27 |
Ассемблер микрокоманд ............................................................................................................... |
27 |
Утилита mcd2mif ............................................................................................................................ |
40 |
Утилита labelmap2mif .................................................................................................................... |
43 |
Приложение №5. Исходный код симулятора.................................................................................. |
45 |
Раевский Сергей Сергеевич, группа 2103 |
2 |

Кафедра Вычислительной Техники СПбГУ ИТМО
Введение
Целью курсового проекта являлась разработка традиционной архитектуры и схем ЭВМ с микропрограммным управлением в технологии ПЛИС.
Исходными данными являлись программная модель микро-ЭВМ MCS51 на уровне Ассемблера, перечень команд, выполняемых схемой, и элементная база Quartus.
Задание на курсовую работу - перечень команд, выполняемых схемой:
orl a, @Ri
orl a, #immediate
da a
mov direct, direct mov direct, @Ri
cjne @Ri, #immediate, rel
Раевский Сергей Сергеевич, группа 2103 |
3 |

Кафедра Вычислительной Техники СПбГУ ИТМО
Часть 1. Описание схемы
Шинная организация
В соответствии с рекомендациями из методического пособия [1], за основу схемы взята шинная организация соединений. Через всю схему проходят две основные шины данных – BusB и BusC. Все пересылки между любыми регистрами выполняются через эти две шины. Так же, одной из основных шин является адресная шина BusA, которая используется для адресации памяти Data и регистров Sfr.
При помощи микрокомандного управления можно выставить на шину тот или иной регистр и записать это значение с шины в какой-либо регистр-приемник.
Иерархический принцип
Схема состоит из нескольких блоков, которые образуют собой иерархическую структуру. На верху структуры находится главный блок, который по сути и является микро-ЭВМ. Он подразделяется на несколько более простых блоков, которые, в свою очередь состоят из еще более простых. Такой подход к проектированию имеет множество преимуществ, таких как:
Возможность независимой разработки и отладки блоков (в том числе, различными людьми)
Возможность легко понимать схему, т.к. каждый блок в отдельности имеет простое устройство и небольшое количество составляющих частей.
Перспектива – создание конвейерной обработки инструкций, где необходимо выполнять несколько действий одновременно.
Полный список блоков и их иерархия приведены в приложении [1].
Синхронизация
В схеме использована 4-рехтактная синхронизация (4 такта на машинный цикл). Это сделано для того, чтобы исключить влияния переходных процессов в блоках на работу схемы в целом. За тактами закреплены следующие действия:
1)Первый такт – на шину ROMM выставляется адрес выполняемой микрооперации. На все шины данных выставляются нужные значения регистров.
2)Второй такт – происходит запись в регистры/память.
3)Третий такт – происходит инкремент счетчиков или загрузка их новыми значениями.
4)Четвертый такт – происходит предвыборка следующей микрокоманды (для проверки условия If).
Система прерываний
Раевский Сергей Сергеевич, группа 2103 |
4 |

Кафедра Вычислительной Техники СПбГУ ИТМО
Реализованная в схеме двухприоритетная система прерываний совместима с системой прерываний MCS 51. Принцип ее работы заключается в постоянном опросе входов запросов на прерывание (INT0-INT6). Если на одном из входов присутствует высокий уровень и не выполняется обработка прерывания этого или более высокого приоритета, происходит запись номера прерывания во внутренний регистр-защелку и одновременное выставление флага IntrFlag, который используется в микропрограммном управлении. Приоритеты прерываний выставляются при помощи соответствующих битов регистра IP, а разрешение прерываний – при помощи битов регистра IE (как и в оригинальном MCS 51). Для обеспечения программного доступа к этим регистрам, в блок контроллера прерываний введены шины
BusA, BusB и BusSfr.
Микрокомандное управление
Всхеме используется микрокомандное управления для обеспечения функционирования вычислительного процесса. Процесс исполнения каждой инструкции процессора подразделяется на несколько стадий, называемых микрооперациями. Это может быть пересылка регистра в регистр, выполнение арифметических операций и т.п. - все, что необходимо для обеспечения требуемой функциональности. Для облегчения и ускорения процесса декодирования инструкции в схеме промена таблица соответствия кода инструкции
иадреса в памяти микрокоманд. Каждая микропрограмма обработки инструкции должна заканчиваться директивой Goto для перехода на метку выборки следующей инструкции. Полный список микрокомандных директив приведен в приложении [2] и в программном коде ассемблера микрокоманд.
Входе работы было реализовано в общей сложности 53 различные инструкции (47 помимо 6 входящих в задание), что было необходимо для всестороннего тестирования схемы
иполучения опыта работы с системой Quartus и опыта проектирования схем. Полный код микрокопрограммы приведен в приложении [3].
Рассмотрим принцип работу микропрограмм на примере инструкции mov direct, direct. Вот часть микрокода, отвечающая за исполнение этой инструкции:
1. .....
2.
3.@Next: # Next instruction
4.If=!IntrFlag;BusB16=Code;PC++;SetInstruction
6......
8.@$85: # mov dest_direct, src_direct
9.BusC16=Code;PC++;Wrk1Src=BusC;SetWrk1;Romm++
10.BusA=Wrk1;BusB8=Data[BusA];Wrk2Src=BusB;SetWrk2;Goto;Romm=@MOV_Wrk2Dest;
12. .....
13.
14.@MOV_Wrk2Dest:
15.BusC16=Code;PC++;Wrk1Src=BusC;SetWrk1;Romm++
16.BusA=Wrk1;BusB8=Wrk2;BusB->Data[BusA];Goto;Romm=@Next
(часть кода, не относящаяся к данной инструкции, пропущена)
Раевский Сергей Сергеевич, группа 2103 |
5 |

Кафедра Вычислительной Техники СПбГУ ИТМО
Прокомментируем каждую строчку отдельно. В строках 1-2 пропущенный код инициализирует контроллер, записывая нули в регистры Acc, B и т.д., а так же, устанавливает SP в 0x07. Строчка 4 – выборка инструкции. Сначала происходит проверка условия отсутствия запроса на прерывание (директива If=!IntrFlag). Если прерываний не поступало, то микрооперация выполняется, иначе – пропускается. При выполнении микрооперации, на шину BusB подаѐтся выход памяти Code (в качестве адреса по умолчанию используется значение регистра PC). Директива SetInstruction записывает текущее значение с шины BusB в регистр IR (Instruction Register), а так же устанавливает счетчик микрокоманд в значение соответствующее адресу начала микропрограммы обработки инструкции. Директива PC++ инкрементирует программный счетчик (как уже было отмечено, запись регистров происходит на такте 2, а инкремент счетчиков – на такте 3, поэтому PC инкрементируется после записи в регистр IR).
После этого, в регистре-счетчике микрокоманд оказывается адрес начала микропрограммы mov direct, direct (метка @$85). В девятой строке на шину подается память кода по адресу PC++ (BusC16=Code;PC++;) и происходит запись байта с шины во временный регистр Wrk1 (Wrk1Src=BusC;SetWrk1;). Последняя директива (Romm++) увеличивает значение счетчика микропрограмм на 1 (для перехода к следующей микрооперации). В строке 10 происходит подача значения регистра Wrk1 на адресную шину BusA и подача значения из памяти Data по адресу с шины BusA через шину BusB в регистр Wrk2. Таким образом, эти две строки обеспечили выборку адреса источника и запись значения источника во временный регистр. После этого происходит безусловный переход на метку @MOV_Wrk2Dest (Goto;Romm=@MOV_Wrk2Dest;). Безусловные переходы в микрокомандах обеспечивают повторное использование кода различными микропрограммами и уменьшают требования к памяти микропрограмм.
По метке @MOV_Wrk2Dest находятся микрокоманды выборки адреса приемника и записи значения из регистра Wrk2 в приемник. Последняя микрокоманда содержит директиву Goto;Romm=@Next, которая делает переход по метке @Next для выборки следующей инструкции.
Раевский Сергей Сергеевич, группа 2103 |
6 |

Кафедра Вычислительной Техники СПбГУ ИТМО
Часть 2. Вспомогательное программное обеспечение.
Ассемблер микрокоманд
Для облегчения перевода микрокоманд из текстовой форму в двоичную, был разработан ассемблер микрокоманд mca. Эта программа переводит микрокод из входного текстового файла в файлы промежуточные фалы .mcd (содержит микрокод) и .labelmap. (содержит адреса меток) Затем, две дополнительные утилиты создают из этих фалов файлы
.mif, пригодные для использования их в системе Quartus.
Ассемблер поддерживает метки, что облегчает создание и отладку микрокода. Метку можно объявить, если начать строку с символа @ (например, @Metka:). Объявления меток обязательно должны заканчиваться двоеточием. При использовании меток в тексте (в командах перехода) нужно так же начинать их имена с символа @. По принятому соглашению, метки вида @$XX: расцениваются как адреса точек входа в обработчик инструкции с шестнадцатеричным кодом XX (например, @$02: для ljmp). Адреса таких меток потом переводятся в таблицу, загружаемую в rom-память блока управления.
Ассемблер использует хорошо известную технику двойного прохода по тексту, где в первом проходе вычисляются адреса меток, а во втором - подставляются в текст.
Полный исходный код ассемблера mca и сопутствующих утилит на языке C# приведен в приложении [4].
Симулятор (модель) процессора
Симулятор процессора позволяет быстро проверить работу микрокоманд, не прибегая к разработке/изменению схемы. Симулятор выполнен в виде консольной программы для системы Windows. Общение с пользователем происходит в текстовом режиме посредством текстовых команд. Такой интерфейс был выбран для ускорения процесса разработки.
Симулятор поддерживает следующие команды:
CODE b l – вывести l байт кода начиная с адреса b
DATA b l - вывести l байт памяти данных начиная с адреса b
SETR r d – установить регистр r значением d (r=a, b, psw, sp, pc, dptr, r0-r7).
При установке PC сбрасывается счетчик микрокоманд. REGS - вывести все регистры
SETD a - начать заполнение памяти data с адреса a SETC a - начать заполнение памяти code с адреса a INTR n – создать прерывание с номером n
EXIT – покинуть симулятор
<Enter> - продолжить исполнение микрокоманд
В симуляторе реализована поддержка всех инструкций из задания + инструкций ljmp и reti для работы с прерываниями. Для облегчения задания начальной программы и регистров симулятор поддерживает скриптовые файлы инициализации. В них можно пользоваться всеми приведенными выше командами, а заканчиваться файл должен символом «.» (обязательное условие). Исходный текст симулятора на языке C# и примера инициализационного скрипта приведен в приложении [5].
Раевский Сергей Сергеевич, группа 2103 |
7 |
Кафедра Вычислительной Техники СПбГУ ИТМО
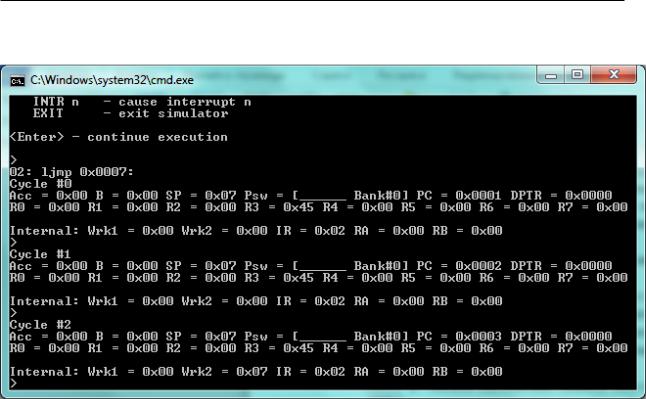
Окно симулятора в процессе работы показано на рисунке 1.
Рис. 1 Окно симулятора sim51
Раевский Сергей Сергеевич, группа 2103 |
8 |

Кафедра Вычислительной Техники СПбГУ ИТМО
Литература
1.П.С. Довгий, В.И. Скорубский ПРОЕКТИРОВАНИЕ ЭВМ. Пособие к выполнению курсового проекта. Спб.: СПБГУ ИТМО 2009
2.Б.С. Иванов. Энциклопедия начинающего радиолюбителя. М: Патриот 1992
Раевский Сергей Сергеевич, группа 2103 |
9 |

Кафедра Вычислительной Техники СПбГУ ИТМО
Приложение №1. Иерархия блоков ЭВМ.
BE_Mutilation – главный блок ЭВМ
Clock – схема делителя частоты синхронизации Core – микропроцессорное ядро
Code_xdata – блок памяти кода и XData
Code – блок памяти кода и регистров PCH/L Control – блок управления
Interrupts – блок контроллера прерываний (управляется непосредственно блоком
Control)
Interrupts-fetch – блок детектора прерываний
Datasfr – блок памяти Data и основных регистров Sfr (Acc, B, Psw, SP, DPTR) Datasfr_mem – блок памяти и регистров Sfr
Data_ram – блок памяти Ram (адреса 0..127)
Acc – Блок регистра-аккумулятора, сдвиговых операций и десятичной коррекции.
B_sp_sfr – блок регистров B и SP PSW – блок регистра PSW DPTR – блок регистров DPTR
Wrk_regs – регистры для хранения промежуточных значений
BusA_Selector – блок выбора значения для шины BusA (формирует так же адреса
R0..R7)
MulDiv – блок аппаратного умножения и деления (управляется блоком DataSfr) Alu – арифметико-логическое устройство
Bit – блок обработки битовых данных Cn_mcr – ПЗУ констант
Ports – блок портов ввода-вывода.
BIDI x4 – блоки соответствующих портов, имеющие одинаковое устройство.
Раевский Сергей Сергеевич, группа 2103 |
10 |

Кафедра Вычислительной Техники СПбГУ ИТМО
Приложение №2. Описание формата микрокоманд.
1)Блок Control/If (блок проверки условия выполнения микрокоманды) Поле If (5 бит).
Значение |
Описание |
00000 |
True |
00001 |
PSW.CF |
00010 |
PSW.AF |
00011 |
PSW.OV |
00100..01011 |
Wrk1[0]..Wrk1[7] |
01100 |
AluPSW.CF |
01101 |
AluPSW.AF |
01110 |
AluPSW.OV |
01111 |
Wrk1=0 |
10000 |
!IntrFlag |
10001-11111 |
Зарезервировано (True) |
2) Блок Control/Control (блок управления исполнением микрокоманд) |
|
Бит |
Действие |
0 |
увеличить счетчик микрокоманд на 1 |
1 |
выборка инструкции |
2 |
безусловный переход |
3-12 |
Адрес безусловного перехода |
Управление контроллером прерываний: |
|
13 |
очистить флаг прерывания |
14 |
завершить обработку прерывания |
15 |
выставить на шину BusB адрес обработчика в векторе прерываний |
3) Блок DataSfr (блок памяти дата и основных регистров Sfr)
Бит |
Действие |
0 |
Записать значение с шины BusB в память Data[BusA] |
1Записать значение с шины BusB в регистр Acc
2^ --- B
3^ --- SP
4инкрементировать SP
5декрементировать SP
6Записать значение шины BusB в регистр Psw
7инкрементировать DPTR
8Записать значение шины BusB в регистр DPL
9Записать значение шины BusB в регистр DPH 10-13 Выбор источника для шины BusB
0000 Null (использовать, если не требуется значение из этого блока)
0001 Wrk2
0010 Wrk1
0011 DPH
0100 DPL
Раевский Сергей Сергеевич, группа 2103 |
11 |