

Архитектура компьютера - Таненбаум Э
..pdf
|
|
|
|
|
Память |
173 |
|
|
АО |
|
»_ |
|
|
|
|
А1 |
|
^ |
|
|
|
|
А2 |
|
*- |
|
|
|
DO |
A3 |
|
»- |
|
|
|
А 4 |
|
*• |
|
|
|
|
|
|
|
|
||
|
D1 |
А5 |
|
*- |
|
|
|
D2 |
А6 |
|
*- |
Микросхема |
|
Микросхема |
А7 |
|
*• |
|
||
D3 |
|
|
||||
памяти |
А8 |
|
•" |
памяти |
|
|
|
|
|
||||
512 Кх8 |
D4 |
А9 |
|
*- |
4096 Кх1 |
|
(4 Мбита) |
D5 |
А10 |
|
*- |
(4Мбита) |
|
|
|
|
|
|
|
|
|
D6 |
|
|
|
|
|
|
D7 |
RAS |
«- |
|
|
|
1 1 1 |
|
CAS |
" |
ш |
|
|
CS WE ОЕ |
|
|
|
|
CS WE ОЕ |
|
а |
|
|
|
|
б |
|
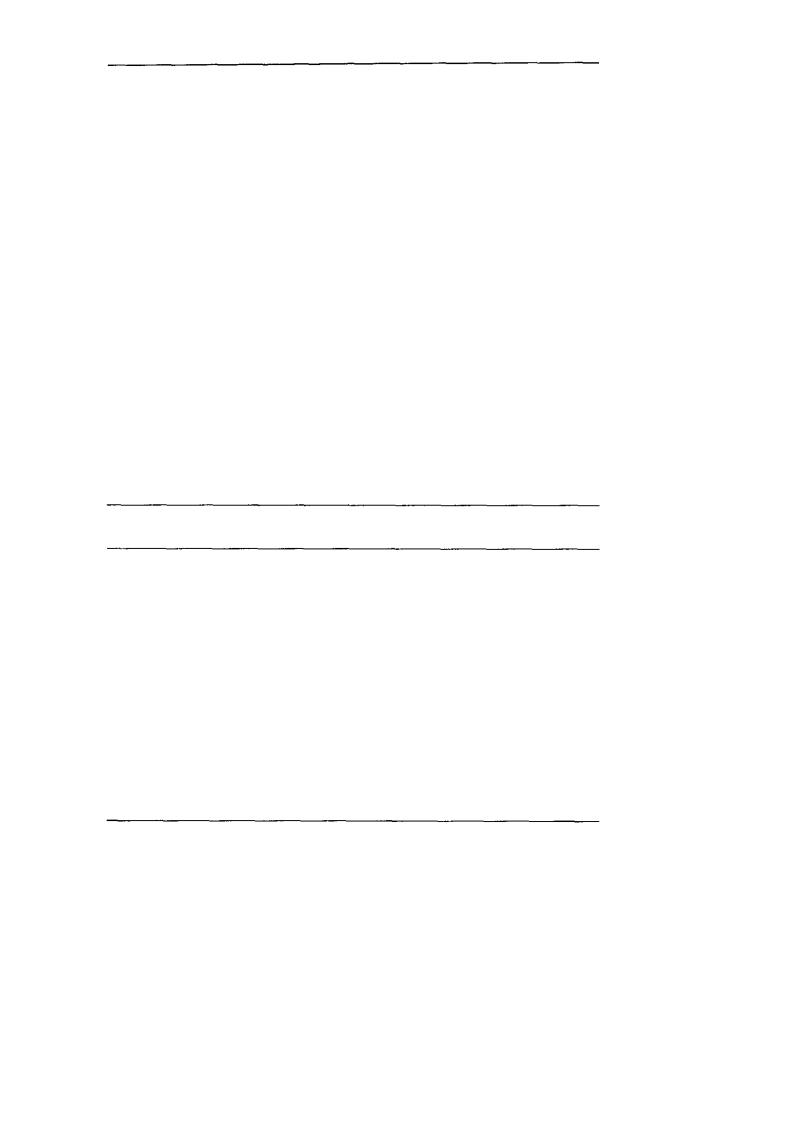
Рис. 3.30. Два способа организации памяти объемом 4 Мбит
Сделаем небольшое замечание по поводу терминологии. На одних выводах высокое напряжение вызывает какое-либо действие, надругих — низкое напряжение.Чтобы избежатьпутаницы,мыбудемупотреблятьтермин «установитьсигнал»-, когда вызывается какое-то действие, вместо того чтобы говорить, что напряжение повышается или понижается. Таким образом, для одних выводов установка сигнала значит установку на 1, а для других — установку на 0. Названия выводов, которые устанавливаются на 0, содержат сверху черту. Сигнал CS устанавливается на 1,
асигнал CS — на 0. Противоположный термин — «сбросить».
Атеперь вернемся к нашей микросхеме. Поскольку обычно компьютер содержит много микросхем памяти, нужен сигнал для выбора необходимой микросхемы, такой, чтобы нужная нам микросхема реагировала на вызов, а остальные нет. Сигнал CS (Chip Select — выбор элемента памяти) используется именно для этой цели. Он устанавливается, чтобы запустить микросхему. Кроме того, нужен способ отличия считывания от записи. Сигнал WE (Write Enable — разрешение записи) используется для указания того, что данные должны записываться, а не считываться. Наконец, сигнал (Ж (Output Enable — разрешение выдачи выходных сигналов) устанавливается для выдачи выходных сигналов. Когда этого сигнала нет, выход отсоединен от остальной части схемы.
На рис. 3.30, б используется другая схема адресации. Микросхема представляет собой матрицу 2048x2048 однобитных ячеек, что составляет 4 Мбит. Чтобы обратиться к микросхеме, сначала нужно выбрать строку. Для этого И-битный номер этой строки подается на адресные выводы. Затем устанавливается сигнал RAS (Row Address Strobe — строб адреса строки). После этого на адресные выводы подается номер столбца и устанавливается сигнал CAS (Column Address Strobe — строб адреса столбца). Микросхема реагирует на сигнал, принимая или выдавая 1 бит данных.

1 7 4 Глава 3. Цифровой логический уровень
Большие микросхемы памяти часто производятся в виде матриц mxn, обращение к которым происходит по строке и столбцу. Такая организация памяти сокращает число необходимых выводов, но, с другой стороны, замедляет обращение к микросхеме, поскольку требуется два цикла адресации: один для строки, а другой для столбца. Чтобы ускорить этот процесс, в некоторых микросхемах можно вызывать адрес ряда, а затем несколько адресов столбцов для доступа к последовательным битам ряда.
Много лет назад самые большие микросхемы памяти обычно были устроены так, как показано на рис. 3.30, б. Поскольку слова выросли от 8 до 32 битов и выше, использовать подобные микросхемы стало неудобно. Чтобы из микросхем 4096 Kxl построить память с 32-битными словами, требуется 32 микросхемы, работающие параллельно. Эти 32 микросхемы имеют общий объем, по крайней мере, 16 Мбайт. Если использовать микросхемы 512 Кх8, то потребуется всего 4 микросхемы, но при этом объем памяти будет составлять 2 Мбайт. Чтобы избежать наличия 32 микросхем, большинство производителей выпускают семейства микросхем с длиной слов 1,4, 8 и 16 битов.
ОЗУ и ПЗУ
Все виды памяти, которые мы рассматривали до сих пор, имеют одно общее свойство: в них можно и записывать информацию, и считывать ее. Такая память называется ОЗУ (оперативное запоминающее устройство). Существует два типа ОЗУ: статическое и динамическое. Статическое ОЗУ конструируется с использованием D-триггеров. Информация в ОЗУ сохраняется на протяжении всего времени, пока к нему подается питание: секунды, минуты, часы и даже дни. Статическое ОЗУ работает очень быстро. Обычно время доступа составляет несколько наносекунд. По этой причине статическое ОЗУ часто используется в качестве кэш-па- мяти второго уровня.
В динамическом ОЗУ, напротив, триггеры не используются. Динамическое ОЗУ представляет собой массив ячеек, каждая из которых содержит транзистор и крошечный конденсатор. Конденсаторы могут быть заряженными и разряженными, что позволяет хранить нули и единицы. Поскольку электрический заряд имеет тенденцию исчезать, каждый бит в динамическом ОЗУ должен обновляться (перезаряжаться) каждые несколько миллисекунд, чтобы предотвратить утечку данных. Поскольку об обновлении должна заботиться внешняя логика, динамическое ОЗУ требует более сложного сопряжения, чем статическое, хотя этот недостаток компенсируется большим объемом.
Поскольку динамическому ОЗУ нужен только 1 транзистор и 1 конденсатор на бит (статическому ОЗУ требуется в лучшем случае 6 транзисторов на бит), динамическое ОЗУ имеет очень высокую плотность записи (много битов на одну микросхему). По этой причине основная память почти всегда строится на основе динамических ОЗУ. Однако динамические ОЗУ работают очень медленно (время доступа занимает десятки наносекунд). Таким образом, сочетание кэш-памяти на основе статического ОЗУ и основной памяти на основе динамического ОЗУ соединяет в себе преимущества обоих устройств.
Существует несколько типов динамических ОЗУ. Самый древний тип, который все еще используется, — FPM (Fast Page Mode— быстрый постраничный

Память 175
режим). Это ОЗУ представляет собой матрицу битов. Аппаратное обеспечение представляет адрес строки, а затем — адреса столбцов (мы описывали этот процесс, когда говорили об устройстве памяти, показанном на рис. 3.30, 6).
FPM постепенно замещается EDO1 (Extended Data Output — память срасширенными возможностями вывода), которая позволяет обращаться к памяти еще до того, как закончилось предыдущее обращение. Такой конвейерный режим не ускоряет доступ к памяти, но зато увеличивает пропускную способность, выдавая больше слов в секунду.
И FPM, и EDO являются асинхронными. В отличие от них так называемое синхронное динамическое ОЗУ управляется одним синхронизирующим сигналом. Данное устройство представляет собой гибрид статического и динамического ОЗУ. Синхронное динамическое ОЗУ часто используется при производстве кэш-памя- ти большого объема. Возможно, данная технология в будущем станет наиболее предпочтительной и в изготовлении основной памяти.
ОЗУ — не единственный тип микросхем памяти. Во многих случаях данные должны сохраняться, даже если питание отключено (например, если речь идет об игрушках, различных приборах и машинах). Более того, после установки ни программы, ни данные не должны изменяться. Эти требования привели к появлению
ПЗУ (постоянных запоминающих устройств), которые не позволяют изменять и стирать хранящуюся в них информацию (ни умышленно, ни случайно). Данные записываются в ПЗУ в процессе производства. Для этого изготавливается трафарет с определенным набором битов, который накладывается на фоточувствительный материал, а затем открытые (или закрытые) части поверхности вытравливаются. Единственный способ изменить программу в ПЗУ — поменять целую микросхему.
ПЗУ стоят гораздо дешевле ОЗУ, если заказывать их большими партиями, чтобы оплатить расходы на изготовление трафарета. Однако они не допускают изменений после выпуска с производства, а между подачей заказа на ПЗУ и его выполнением можетпройти несколько недель. Чтобы компаниям было проще разрабатывать новые устройства, основанные на ПЗУ, были выпущены программируемые ПЗУ. В отличие от обычных ПЗУ, их можно программировать в условиях эксплуатации, что позволяет сократить время выполнения заказа. Многие программируемые ПЗУ содержат массив крошечных плавких перемычек. Можно пережечь определенную перемычку, если выбрать нужную строку и нужный столбец, а затем приложить высокое напряжение к определенному выводу микросхемы.
Следующая разработка этой линии — стираемое программируемое ПЗУ, которое можно не только программировать в условиях эксплуатации, но и стирать с него информацию. Если кварцевое окно в данном ПЗУ подвергать воздействию сильного ультрафиолетового света в течение 15 минут, все биты установятся на 1. Если нужно сделать много изменений во время одного этапа проектирования, стираемые ПЗУ гораздо экономичнее, чем обычные программируемые ПЗУ, поскольку их можно использовать многократно. Стираемые программируемые ПЗУ обычно устроены так же, как статические ОЗУ. Например, микросхема 27С040 имеет структуру, которая показана на рис. 3.30, а, а такая структура типична для статического ОЗУ.
Динамическая память типа EDO вытеснила обычную динамическую память, работающую в режиме FPM, в середине 90-х годов. — Примеч. научи, ред.
176 Глава 3. Цифровойлогический уровень
Следующий этап — электронно-перепрограммируемое ПЗУ, с которого можно стирать информацию, прилагая к нему импульсы, и которое не нужно для этого помещать в специальную камеру, чтобы подвергнуть воздействию ультрафиолетовых лучей. Кроме того, чтобы перепрограммировать данное устройство, его не нужно вставлять в специальный аппарат для программирования, в отличие от стираемого программируемого ПЗУ, Но с другой стороны, самые большие электрон- но-перепрограммируемые ПЗУ в 64 раза меньше обычных стираемых ПЗУ, и работают они в два раза медленнее. Электронно-перепрограммируемые ПЗУ не могут конкурировать с динамическими и статическими ОЗУ, поскольку они работают в 10 раз медленнее, их емкость в 100 раз меньше и они стоят гораздо дороже. Они используются только в тех ситуациях, когда необходимо сохранение информации при выключении питания.
Более современный тип электронно-перепрограммируемого ПЗУ — флэш-па- мять. В отличие от стираемого ПЗУ, которое стирается под воздействием ультрафиолетовых лучей, и от электронно-программируемого ПЗУ, которое стирается по байтам, флэш-память стирается и записывается блоками. Как и любое элект- ронно-перепрограммируемое ПЗУ, флэш-память можно стирать, не вынимая ее из микросхемы. Многие изготовители производят небольшие печатные платы, содержащие десятки мегабайтов флэш-памяти. Они используются для хранения изображений в цифровых камерах и для других целей. Возможно, когда-нибудь флэшпамять вытеснит диски, что будет грандиозным шагом вперед, учитывая время доступа в 100 не. Основной технической проблемой в данный момент является то, что флэш-память изнашивается после 10 000 стираний, а диски могут служить годами независимо от того, сколько раз они перезаписывались. Краткое описание различных типов памяти дано в табл. 3.2.
Таблица 3.2. Характеристики различных видов памяти
Тип запо- |
Категория |
Стирание |
Изменение |
Энерго- |
Применение |
минающего |
|
записи |
информации |
зависи- |
|
устройства |
|
|
по байтам |
мость |
|
Статическое |
Чтение/ |
Электрическое |
Да |
Да |
Кэш-память |
ОЗУ (SRAM) |
запись |
|
|
|
второго уровня |
Динамическое |
Чтение/ |
Электрическое |
Да |
Да |
Основная память |
ОЗУ(DRAM) |
запись |
|
|
|
|
ПЗУ (ROM) |
Только |
Невозможно |
Нет |
Нет |
Устройства |
|
чтение |
|
|
|
большого размера |
Програм- |
Только |
Невозможно |
Нет |
Нет |
Устройства |
мируемое |
чтение |
|
|
|
небольшого |
ПЗУ (PROM) |
|
|
|
|
размера |
Стираемое |
Преиму- |
Ультра- |
Нет |
Нет |
Моделирование |
програм- |
щественно |
фиолетовый |
|
|
устройств |
мируемое |
чтение |
свет |
|
|
|
n3Y(EPROM) |
|
|
|
|
|
Электронно- |
Преиму- |
Электрическое |
Да |
Нет |
Моделирование |
перепрограм- |
щественно |
|
|
|
устройств |
мируемое ПЗУ |
чтение |
|
|
|
|
(EEPROM) |
|
|
|
|
|
Флэш-память |
Чтение/ |
Электрическое |
Нет |
Нет |
Цифровые камеры |
(Flash) |
запись |
|
|
|
|

Микросхемы процессоров и шины |
177 |
Микросхемы процессоров и шины
Поскольку нам уже известна некоторая информация о МИС, СИС и микросхемах памяти, то мы можем сложить все составные части вместе и изучать целые системы. В этом разделе сначала мы рассмотрим процессоры на цифровом логическом уровне, включая цоколевку (то есть значение сигналов на различных выводах). Поскольку центральные процессоры тесно связаны с шинами, которые они используют, мы также кратко изложим основные принципы разработки шин. В следующих разделах мы подробно опишем примеры центральных процессоров и шин для них.
Микросхемы процессоров
Все современные процессоры помещаются на одной микросхеме. Это делает вполне определенным их взаимодействие с остальными частями системы. Каждая микросхема процессора содержит набор выводов, через которые происходит обмен информацией с внешним миром. Одни выводы передают сигналы от центрального процессора, другие принимают сигналы от других компонентов, третьи делают и то и другое. Изучив функции всех выводов, мы сможем узнать, как процессор взаимодействует с памятью и устройствами ввода-вывода на цифровом логическом уровне.
Выводы микросхемы центрального процессора можно подразделить натритипа: адресные, информационные и управляющие. Эти выводы связаны с соответствующими выводами на микросхемах памяти и микросхемах устройств ввода-вывода через набор параллельных проводов (так называемую шину). Чтобы вызвать команду, центральный процессор сначала посылает в память адрес этой команды по адресным выводам. Затем он запускает одну или несколько линий управления, чтобы сообщить памяти, что ему нужно, например, прочитать слово. Память выдает ответ, помещая требуемое слово на информационные выводы процессора и посылая сигнал о том, что это сделано. Когда центральный процессор получает данный сигнал, он принимает слово и выполняет вызванную команду.
Команда может требовать чтения или записи слов, содержащих данные. В этом случае весь процесс повторяется для каждого дополнительного слова. Как происходит процесс чтения и записи, мы подробно рассмотрим ниже. Важно понимать, что центральный процессор обменивается информацией с памятью и устройствами ввода-вывода, подавая сигналы на выводы и принимая сигналы на входы. Другого способа обмена информацией не существует.
Число адресных выводов и число информационных выводов — два ключевых параметра, которые определяют производительность процессора. Микросхема, содержащая m адресных выводов, может обращаться к 2т ячейкам памяти. Обычно m равно 16, 20, 32 или 64. Микросхема, содержащая п информационных выводов, может считывать или записывать n-битное слово за одну операцию. Обычно п равно 8,16,32,36 или 64. Центральному процессору с 8 информационными выводами понадобится 4 операции, чтобы считать 32-битное слово, тогда как процессор, имеющий 32 информационных вывода, может сделать ту же работу в одну

1 78 Глава 3. Цифровой логический уровень
операцию. Следовательно, микросхема с 32 информационными выводами работает гораздо быстрее, но и стоит гораздо дороже.
Кроме адресных и информационных выводов каждый процессор содержит выводы управления. Выводы управления регулируют и синхронизируют поток данных к процессору и от него, а также выполняют другие разнообразные функции. Все процессоры содержат выводы для питания (обычно +3,3 В или +5 В), «земли» и синхронизирующего сигнала (меандра). Остальные выводы разнятся от процессора к процессору. Тем не менее выводы управления можно разделить на несколько основных категорий:
1.Управление шиной.
2.Прерывание.
3.Арбитраж шины.
4.Состояние.
5.Разное.
Ниже мы кратко опишем каждую из этих категорий. Когда мы будем рассматривать микросхемы Pentium II, UltraSPARC II и picojava II, мы дадим более подробную информацию. Схема типичного центрального процессора, в котором используются эти типы сигналов, изображена на рис. 3.31.
Адресация -*-¥— |
|
^ * |
Арбитраж шины |
||
Данные -»-/-»- |
Типичный |
•* |
Сопроцессор |
||
|
|
|
|
|
|
Управление * |
микропроцессор |
|
|||
|
|
* |
Состояние |
||
шиной |
|
*- |
|
||
|
|
|
|
||
Прерывания _.. £_ |
|
^ |
Прочие сигналы |
||
|
|
|
• |
\ |
|
|
|
|
|
Символ |
|
|
|
F |
+5v |
заземления |
|
Символ |
/ |
т |
|
|
|
синхронизирующего Напряжение 5 В |
|
||||
сигнала |
|
|
|
|
|
Рис. 3 . 31 . Цоколевка типичного центрального процессора. Стрелочки указывают входные и выходныесигналы. Короткиедиагональные линии указывают на наличие нескольких выводов. Для конкретныхпроцессоров будетдано число этих выводов
Выводы управления шиной по большей части представляют собой выходы из центрального процессора в шину (и следовательно, входы в микросхемы памяти и микросхемы устройств ввода-вывода). Они сообщают, что процессор хочет считать информацию из памяти, или записатьинформацию в память, илисделатьчтонибудь еще.
Выводы прерывания — это входы из устройств ввода-вывода в процессор. В большинстве систем процессор может дать сигнал устройству ввода-вывода начать операцию, а затем приступить к какому-нибудь другому действию, пока устройство

Микросхемы процессоров и шины |
179 |
ввода-вывода выполняет свою работу. Когда устройство ввода-вывода заканчивает свою работу, контроллер ввода-вывода посылает сигнал на один из выводов прерывания, чтобы прервать работу процессора и заставить его обслуживать устройство ввода-вывода (например, проверять ошибки ввода-вывода). Некоторые процессоры содержат выходной вывод, чтобы подтверждать получение сигнала прерывания.
Выводы разрешения конфликтов в шине нужны для того, чтобы регулировать поток информации в шине, то есть не допускать таких ситуаций, когда два устройства пытаются воспользоваться шиной одновременно. В целях разрешения конфликтов центральный процессор считается устройством.
Некоторые центральные процессоры могут работать с различными сопроцессорами(например, с графическими процессорами, процессорами с плавающей точкой и т. п.). Чтобы обеспечить обмен информации между процессором и сопроцессором, нужны специальные выводы для передачи сигналов.
Кроме этих выводов у некоторых процессоров есть различные дополнительные выводы. Одни из них выдают или принимают информацию о состоянии, другие нужны для перезагрузки компьютера, а третьи — для обеспечения совместимости со старыми микросхемами устройств ввода-вывода,
Шины
Шина — это группа проводников, соединяющих различные устройства. Шины можно разделить на группы в соответствии с выполняемыми функциями. Они могут быть внутренними по отношению к процессору и служить для передачи данных в АЛУ и из АЛУ, а могут быть внешними по отношению к процессору и связывать процессор с памятью или устройствами ввода-вывода. Каждый тип шины обладает определенными свойствами, и к каждому из них предъявляются определенные требования. В этом и следующих разделах мы сосредоточимся на шинах, которые связывают центральный процессор с памятью и устройствами ввода-вы- вода. В следующей главе мы подробно рассмотрим внутренние шины процессора.
Первые персональные компьютеры имели одну внешнюю шину, которая называлась системной шиной. Она состояла из нескольких медных проводов (от 50 до 100), которые встраивались в материнскую плату. На материнской плате находились разъемы на одинаковых расстояниях друг от друга для микросхем памяти и устройств ввода-вывода. Современные персональные компьютеры обычно содержат специальную шину между центральным процессором и памятью и по крайней мере еще одну шину для устройств ввода-вывода. На рис. 3.32 изображена система
содной шиной памяти и одной шиной ввода-вывода.
Влитературе шины обычно изображаются в виде жирных стрелок, как показано на этом рисунке. Разница междужирной и нежирной стрелкой небольшая. Когда все биты одного типа, например адресные или информационные, рисуется обычная стрелка. Когда включаются адресные линии, линии данных и управления, используется жирная стрелка.
Хотя разработчики процессоров могут использовать любой тип шины для микросхемы, должны быть введены четкие правила о том, как работает шина, и все

180 |
Глава 3. Цифровой логический уровень |
устройства, связанные с шиной, должны подчиняться этим правилам, чтобы платы, которые выпускаются третьими лицами, подходили к системной шине. Эти правила называются протоколом шины. Кроме того, должны существовать определенные технические требования, чтобы платы от третьих производителей подходили к каркасу для печатных плат и имели разъемы, соответствующие материнской плате механически и с точки зрения мощностей, синхронизации и т. д.
Микросхема процессора
|
|
Шины |
|
|
|
|
Регистры |
|
|
Контроллер |
Шина памяти |
|
|
|
|
|
Память |
|||
Г1 |
|
|
|
|
||
|
|
D |
шины |
|
||
|
|
|
|
|||
|
|
|
|
|
||
г. |
|
|
|
|
|
|
\ |
|
АЛУ / 7 |
|
Шинаввода-вывода |
||
|
|
|
|
|||
|
|
1 |
|
|
|
|
Встроенная в микросхему шина |
Диск |
Модем |
Принтер |
|||
|
|
|
||||
Рис.3.32.Компьютернаясистемаснесколькимишинами
Существует ряд широко используемых в компьютерном мире шин. Приведем несколько примеров: Omnibus (PDP-8), Unibus (PDP-11), IBM PC (PC/XT), ISA (PC/AT), EISA (80386), MicroChannel (PC/2), PCI (различные персональные компьютеры), SCSI (различные персональные компьютеры и рабочие станции), Nubus (Macintosh), Universal Serial Bus (современные персональные компьютеры), FireWire (бытовая электроника), VME (оборудование в кабинетах физики) и Сагаас (физика высоких энергий). Может быть, все стало бы намного проще, если бы все шины, кроме одной, исчезли с поверхности Земли (или кроме двух). К сожалению, стандартизация в этой области кажется маловероятной, и уже вложено слишком много средств во все эти несовместимые системы.
Давайте начнем с того, как работают шины. Некоторые устройства, связанные с шиной, являются активными и могут инициировать передачу информации по шине, тогда как другие являются пассивными и ждут запросов. Активное устройство называется задающим устройством, пассивное — подчиненным устройством.
Когда центральный процессор требует от контроллера диска считать или записать блок информации, центральный процессор действует как задающее устройство, а контроллер диска — как подчиненное устройство. Контроллер диска может действовать как задающее устройство, когда он командует памяти принять слова, которые считал с диска. Несколько типичных комбинаций задающего и подчиненного устройств указаны в табл. 3.3. Память ни при каких обстоятельствах не может быть задающим устройством.

|
Микросхемы процессоров и шины |
|
181 |
||
Таблица3.3.Примерызадающихиподчиненныхустройств |
|
||||
Задающее устройство |
Подчиненное устройство Пример |
|
|||
|
|
|
|
|
|
Центральный процессор |
Память |
Вызов команд и данных |
|
||
Центральный процессор |
Устройство ввода-вывода |
Инициализация передачи данных |
|||
Центральный процессор |
Сопроцессор |
Передача команды от процессора |
|||
|
|
к сопроцессору |
|
||
Устройство ввода-вывода Память |
ПДП (прямой доступ к памяти) |
|
|||
Сопроцессор |
Центральный процессор |
Вызов сопроцессором операндов из |
|||
|
|
центрального процессора |
|
||
Двоичные сигналы, которые выдают устройства компьютера, часто недостаточно интенсивны, чтобы активизировать шину, особенно если она достаточно длинная и если к ней подсоединено много устройств. По этой причине большинство задающих устройств шины обычно связаны с ней через микросхему, которая называется драйвером шины, по существу являющуюся двоичным усилителем. Сходным образом большинство подчиненных устройств связаны с шиной приемником шины. Для устройств, которые могут быть и задающим, и подчиненным устройством, используется приемопередатчик шины. Эти микросхемы взаимодействия с шиной часто являются устройствами с тремя состояниями, что дает им возможность отсоединяться, когда они не нужны. Иногда они подключаются через открытый коллектор, что дает сходный эффект. Когда одно или несколько устройств на открытом коллекторе требуют доступа к шине в одно и то же время, результатом является булева операция ИЛИ над всеми этими сигналами. Такое соглашение называется монтажным ИЛИ. В большинстве шин одни линии являются устройствами с тремя состояниями, а другие, которым требуется свойство монтажного ИЛИ, — открытым коллектором.
Как и процессор, шина имеет адресные линии, информационные линии и линии управления. Тем не менее между выводами процессора и сигналами шины может и не быть взаимно однозначного соответствия. Например, некоторые процессоры содержат три вывода, которые выдают сигнал чтения из памяти или записи в память, или чтения устройства ввода-вывода, или записи на устройство вво- да-вывода, или какой-либо другой операции. Обычная шина может содержать одну линию для чтения из памяти, вторую линию для записи в память, третью — для чтения устройства ввода-вывода, четвертую — для записи на устройство ввода-вы- вода и т. д. Микросхема-декодер должна тогда связывать данный процессор с такой шиной, чтобы преобразовывать 3-битный кодированный сигнал в отдельные сигналы, которые могут управлять линиями шины.
Разработка шин и принципы действия шин — это достаточно сложные вопросы^ и по этому поводу написан ряд книг [128, 135,136]. Принципиальными вопросамивразработкеявляются ширинашины, синхронизация шины, арбитражшины
ифункционирование шины. Все эти параметры существенно влияют на скорость
ипропускную способность шины. В следующих четырех разделах мы рассмотрим каждый из них.

1 8 2 Глава3 Цифровойлогический уровень
Ширина шины
Ширина шины — самый очевидный параметр при разработке. Чем больше адресных линий содержит шина, тем к большему объему памяти может обращаться процессор. Если шина содержит п адресных линий, тогда процессор может использовать ее для обращения к 2" различным ячейкам памяти. Для памяти большой емкости необходимо много адресных линий. Это звучит достаточно просто.
Проблема заключается в том, что для широких шин требуется больше проводов, чем для узких. Они занимают больше физического пространства (например, на материнской плате), и для них нужны разъемы большего размера. Все эти факторы делают шину дорогостоящей. Следовательно, необходим компромисс между максимальным размером памяти и стоимостью системы. Система с шиной, содержащей 64 адресные линии, и памятью в 232 байт будет стоить дороже, чем система с шиной, содержащей 32 адресные линии, и такой же памятью в 232 байт. Дальнейшее расширение не бесплатное.
Многие разработчики систем недальновидны, что приводит к неприятным последствиям. Первая модель IBM PC содержала процессор 8088 и 20-битную адресную шину (рас. 3.33, а). Шина позволяла обращаться к 1 Мбайт памяти.
20-битный адрес
|
20-битный адрес |
|
20-битный адрес |
|
Управление |
|
|
|
|
|
4-битныйадрес |
|
|
80386 |
Управление |
4-битныйадрес |
Управление |
|
|
8-битныйадрес |
|
Управление |
|
|
|
Управление |
в |
б |
в |
Рис.3,33.Расширениеадреснойшиныстечениемвремени
Когда появился следующий процессор (80286), Intel решил увеличить адресное пространство до 16 Мбайт, поэтому пришлось добавить еще 4 линии (не нарушая изначальные 20 по причинам совместимости с более старыми версиями), как показано на рис. 3.33, б. К сожалению, пришлось также добавить линии управления для новых адресных линий. Когда появился процессор 80386, было добавлено еще 8 адресных линий и, естественно, несколько линий управления, как показано на рис. 3.33, в. В результате получилась шина EISA. Однако было бы лучше, если бы с самого начала имелось 32 линии.
С течением времени увеличивается не только число адресных линий, но и число информационных линий. Хотя это происходит по несколько другой причине. Можно увеличить пропускную способность шины двумя способами: сократить время цикла шины (сделать большее количество передач в секунду) или увели-