

Описание учебного стенда
В состав лабораторного стенда компании ФЕСТО (рис.1) входят следующие составляющие: координатный контроллер SPC200− 1, блок диагностики и обслуживанияSPC200-MMI(на рисунке не показан), контроллер шагового двигателяSEC-ST− 2, шаговый двигательMTR-ST− 3 и преобразователь движения с ременной передачейDGE-ZR− 4.
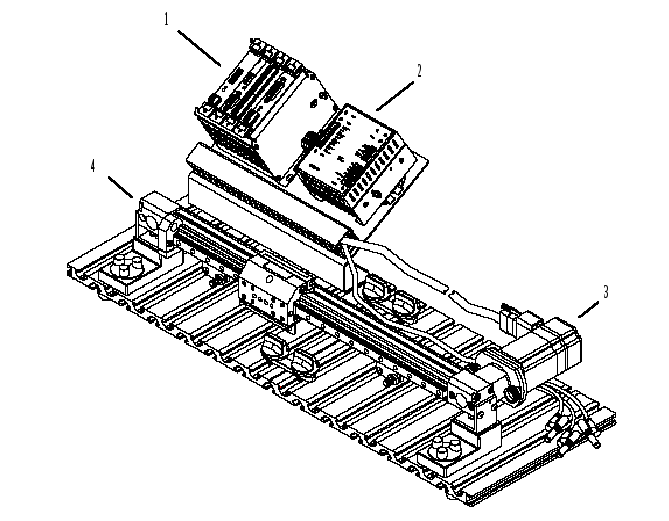
Рис. 1. Система управления перемещением каретки линейного привода
Координатный контроллер SPC200предназначен для управления перемещением каретки линейного привода, подключения датчиков и формирования сигналов для контроллера шагового двигателя, о котором будет рассказано ниже.
Дополнительно к координатному контроллеру можно подключать блок диагностики и обслуживания, внешний вид которого представлен на рис. 2:
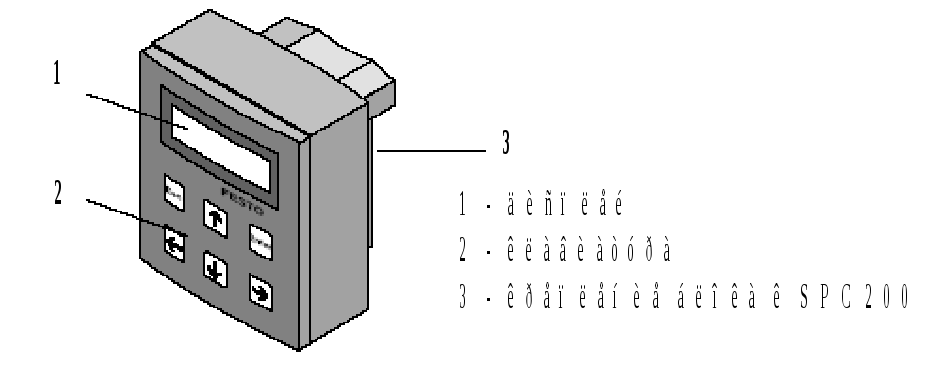
Рис. 2. Внешний вид блока диагностики и обслуживания
Координатный контроллер SPC200состоит из следующих модулей: модуль питания; модуль диагностики; дискретный модуль ввода/вывода; модуль шагового двигателя. Передняя панель координатного контроллераSPC200 представлена на рис. 3.

Рис. 3. Передняя панель координатного контроллера SPC200
Дискретный модуль ввода/вывода будет рассматривается в лабораторной работе №4. Модуль шагового двигателя служит для подключения датчиков конечных положений и контроллера шагового двигателя SEC-ST.
Контроллер шагового двигателя SEC-STимеет вид, приведенный на рис. 4.
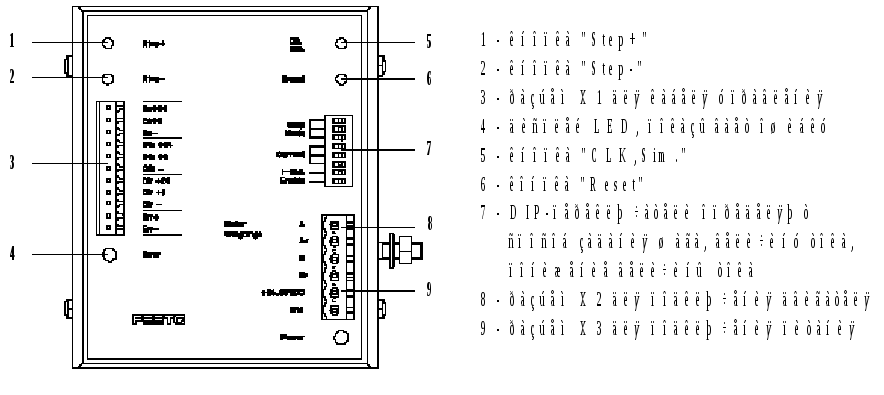
Рис. 4. Контроллер шагового двигателя SEC-ST
К разъему X1(рис. 4) подключается кабель от координатного контроллераSPC200. РазъемX2используется для подключения шагового двигателя. Через разъемX3к контроллеру подводится электрическое питание.
Кнопки Step+иStep-предназначены для управления шаговым двигателем в ручном режиме и отработки ротором двигателя единичных шагов. С помощьюDIP-переключателей (рис. 4) на панели контроллера шагового двигателяSEC-ST можно изменять величину силы тока, протекающую в обмотках шагового двигателя, и его шаг.
Шаговый двигатель, используемый в системе, представлен на рис. 5.

Рис. 5. Шаговый двигатель MTR-ST
Технические параметры двигателя приведены в ПРИЛОЖЕНИИ 1.
Преобразователь движения применяется для преобразования вращательного движения ротора двигателя в поступательное перемещение каретки привода. Данное преобразование может осуществляться с помощью ременной или червячной передачи.
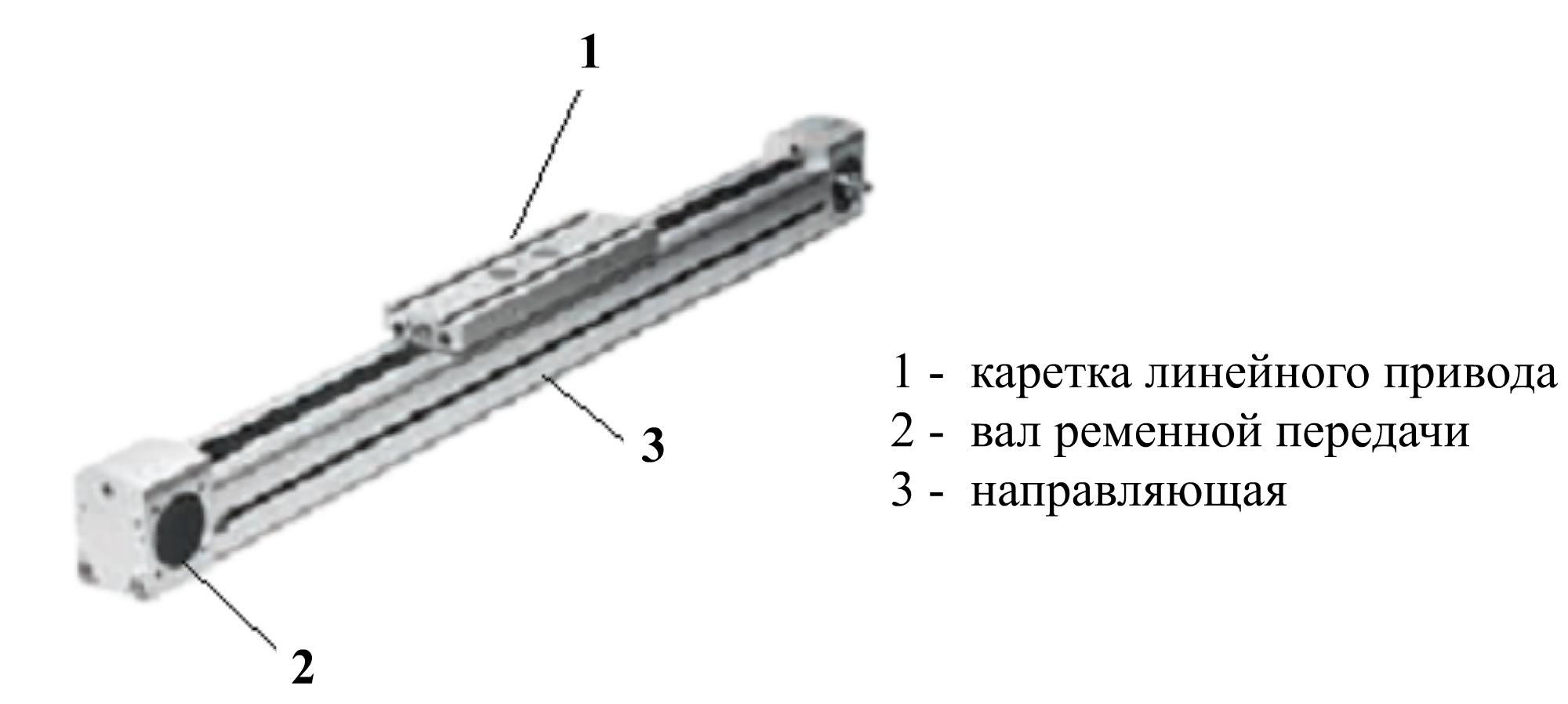
Рис. 6. Преобразователь движения с ременной передачей
На рис. 6 показан внешний вид преобразователя движения. Вал двигателя через муфту и фланец присоединяется к валу ременной передачи. При вращении вала двигателя каретка линейного привода совершает поступательное перемещение по направляющей преобразователя движения.
Важным параметром преобразователя движения с ременной передачей является радиус приведения, определяемый формулой:
![]() , (1)
, (1)
где
![]() − скорость перемещения каретки линейного
привода, м/с;
− скорость перемещения каретки линейного
привода, м/с;![]() − скорость вращения вала двигателя,
рад/с.
− скорость вращения вала двигателя,
рад/с.
Для
используемого в стенде преобразователя
движения радиус приведения равен
![]() м.
м.
Лабораторная работа №1
КОНФИГУРИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ШАГОВЫМ ПРИВОДОМ
Цель работы
Целью работы является приобретение навыков конфигурирования координатного контроллера SPC200 и установки параметров контроллера шагового двигателя SEC-ST. При выполнении работы изучается влияние изменения величины силы тока в обмотках на динамику шагового двигателя, определяются экспериментальные значения средних скоростей каретки линейного привода и моментов, развиваемых двигателем.