

Программа работы
Сконфигурировать контроллер SPC200, воспользовавшись программным обеспечениемFESTO WinPISA.
Загрузить программу в координатный контроллер SPC200и, воспользовавшись опцией перемещения каретки линейного привода в реперную точку, убедится в работоспособности системы
Исследовать влияния силы тока на динамику ШД.
Измерить среднюю скорость каретки линейного привода при всех установленных значениях величины силы тока в обмотках ШД.
Измерить значение момента при изменении величины силы тока в обмотках ШД.
Построить графики зависимостей скорости каретки линейного привода и электромагнитного момента ШД от величины силы тока в его обмотках.
Методические указания
Для создания нового проекта нужно выбрать пункт из меню File/New Project. В результате выполнения данного действия появляется экран Details on project, как показано на рис. 10. В строке Title указывается имя проекта, а в разделе Description можно дать краткое описание проекта.
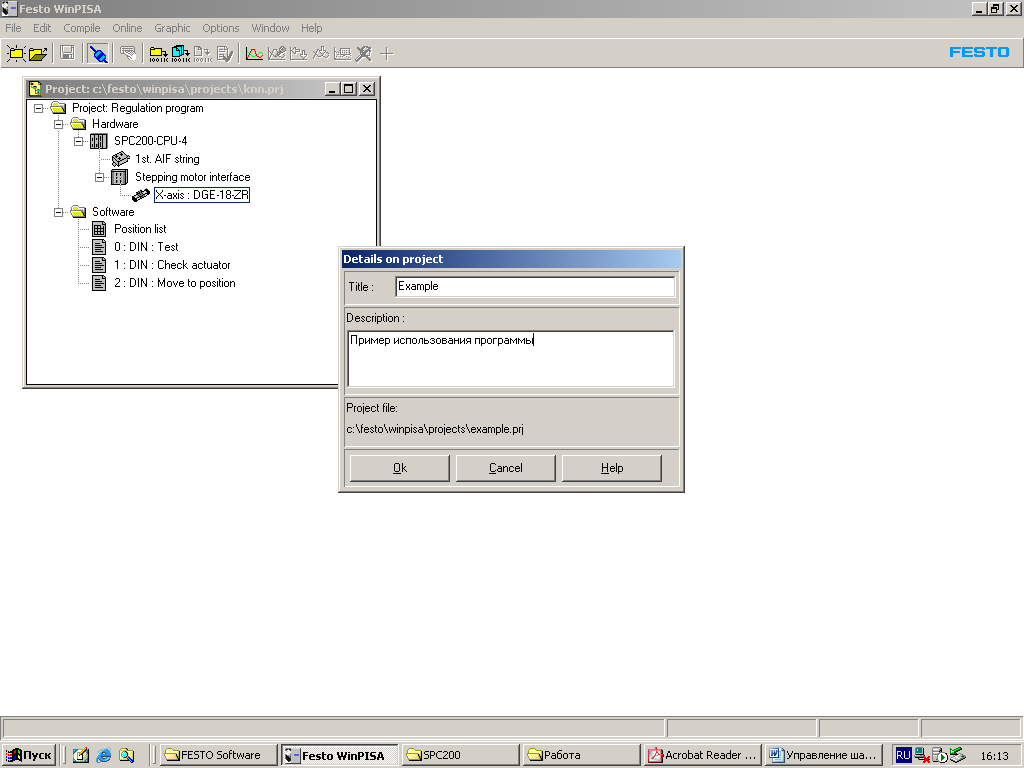
Рис. 10. Окно Details on project
После нажатия на кнопку Ok появляется окно проекта, представленное на рис. 11.
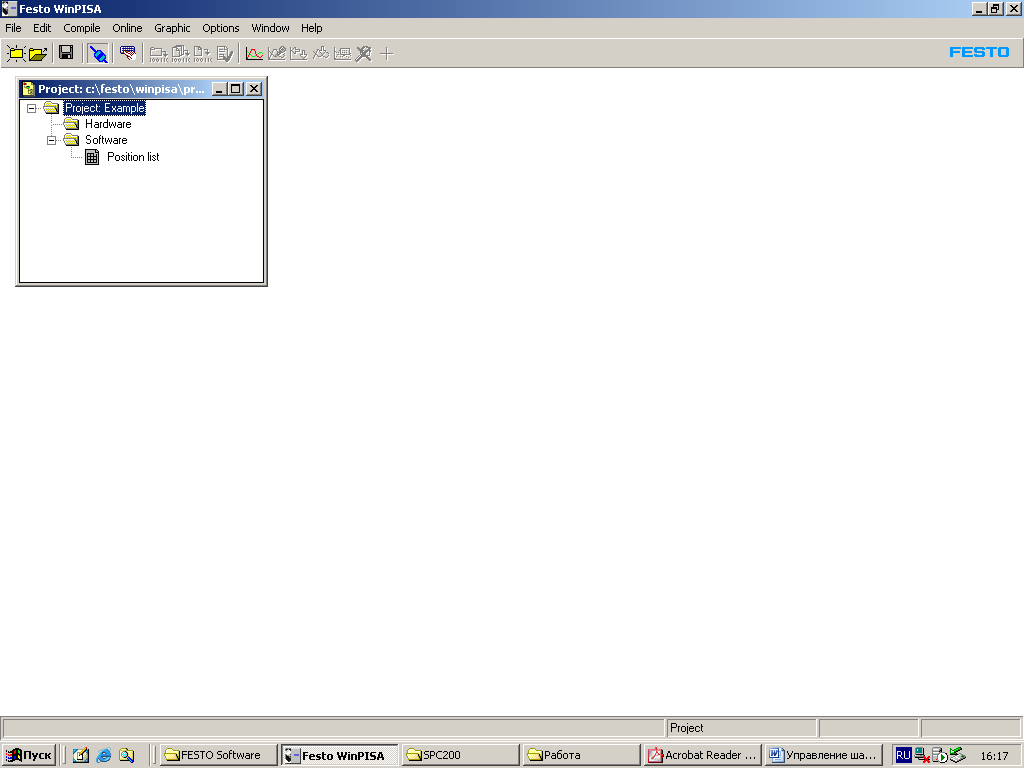
Рис. 11. Окно проекта
В этом окне содержится информация о проекте. Здесь указывается все используемое в работе оборудование (Hardware), регистры позиций (Software/Position list), в которых могут быть записаны желаемые положения каретки, а также непосредственно программы позиционирования, загружаемые в контроллер.
В окне проекта выберите пункт Hardware и нажмите правую кнопку мыши. Во всплывшем окне нужно выбрать Insert object и далее SPC200, как показано на рис. 12.
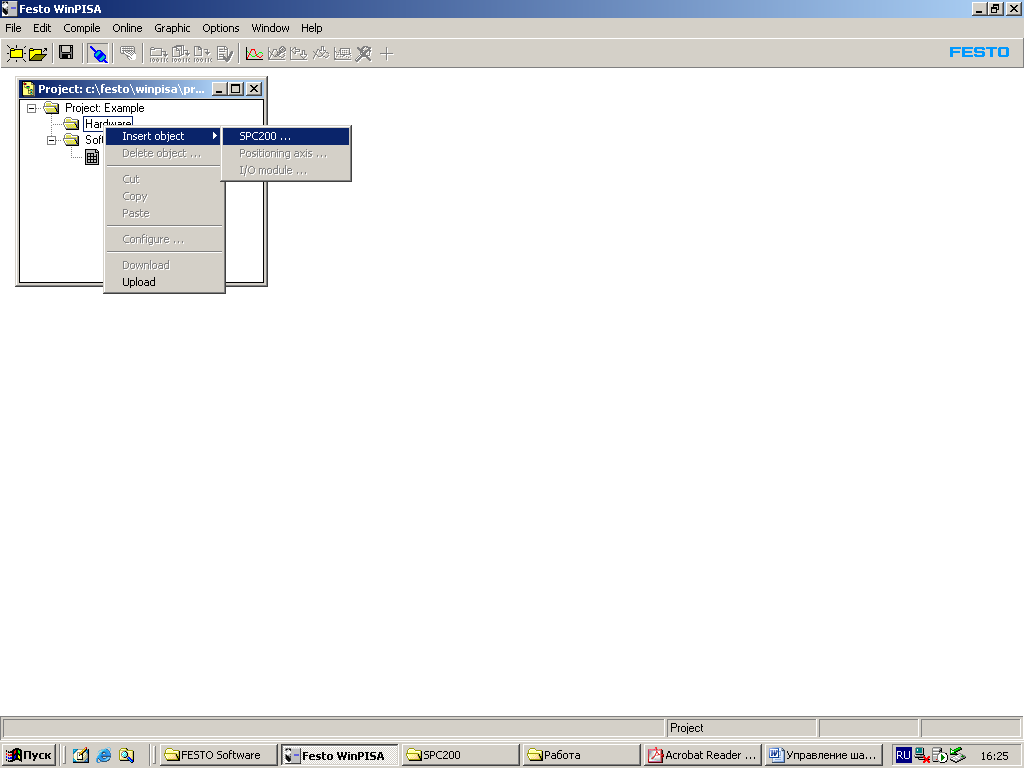
Рис. 12. Добавление оборудования
После выполнения предыдущего действия, появляется окно SPC configuration, представленное на рис. 13. В закладке Modules выбираются составляющие модули контроллера. Контроллер SPC200 состоит в данном случае из четырех модулей, поэтому Base Unit следует выбирать CPU-4. Нажатием левой кнопки мыши на заглушке 1 выбираем с помощью развертывающегося окна 2 нужный модуль. Третий модуль должен быть дискретным модулем ввода/вывода I/O module, а четвертый – модулем шагового двигателя Stepping motor indexer module.

Рис. 13. Окно SPC configuration
В том же окне перейдите в закладку Operating Mode/Start Programs и выберите Start/Stop в Operating Mode.
Нажатие кнопки Ok после выполнения всех описанных выше операций приводит к появлению окна проекта в виде, представленном на рис. 14. Теперь конфигурация контроллера в программе сформирована.
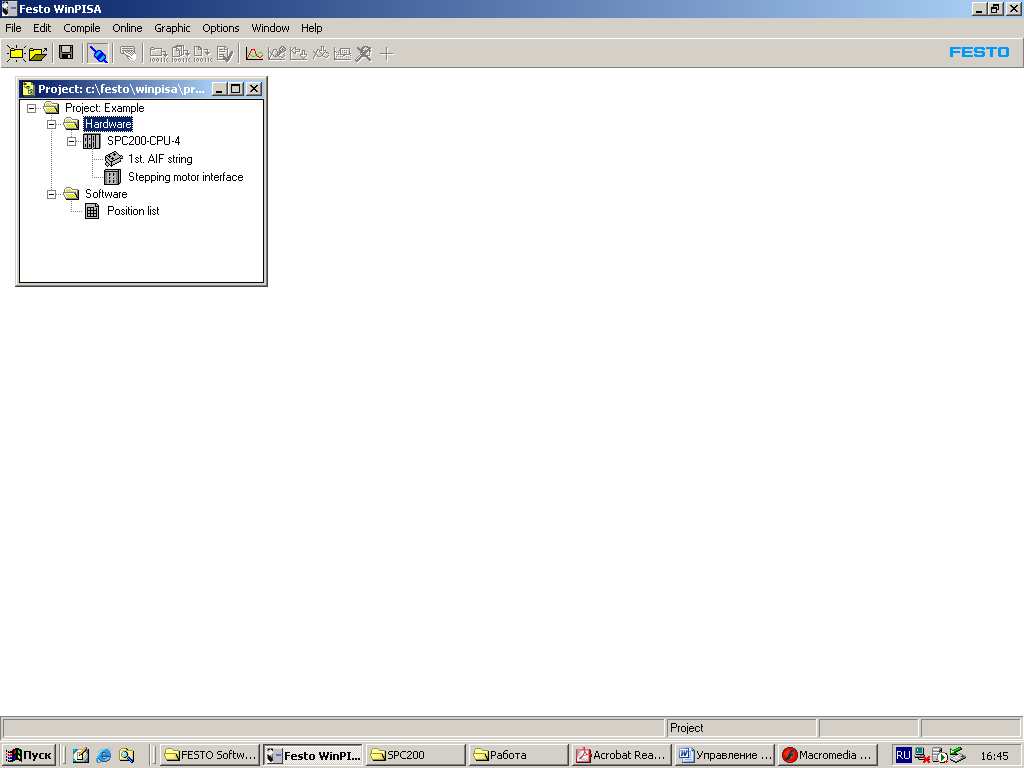
Рис. 14. Окно проекта
Далее необходимо указать используемый преобразователь движения и приводной двигатель. Выберите в окне проекта закладку Stepping motor interface и нажмите правую кнопку мыши. Появится окно, представленное на рис. 15.
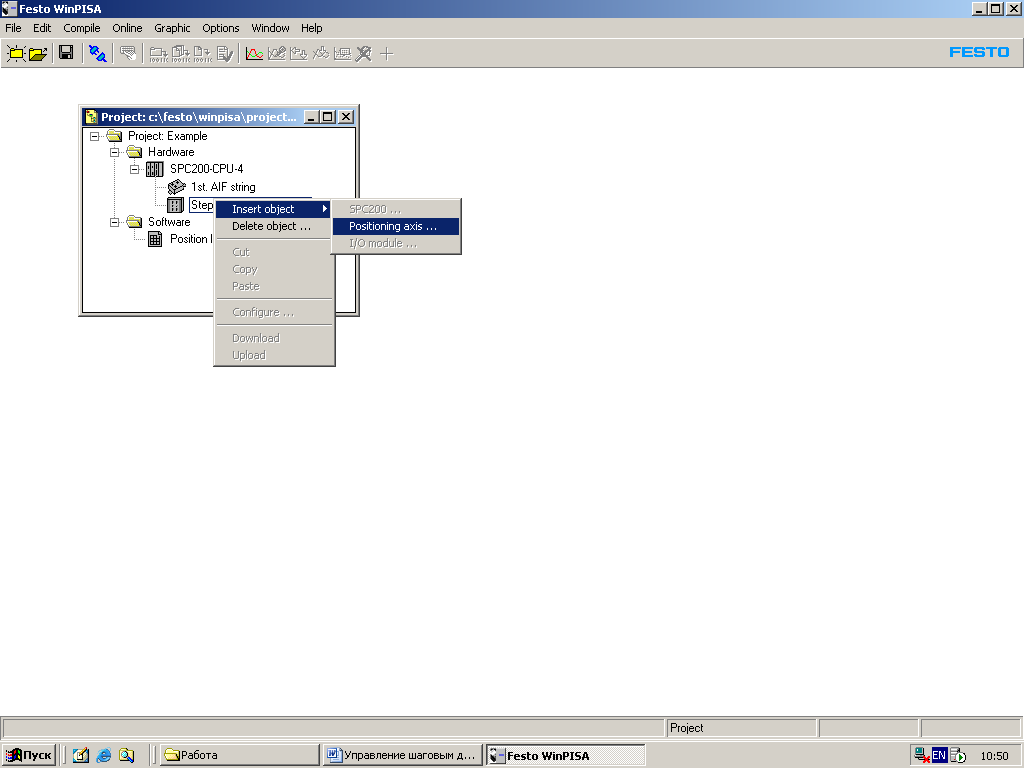
Рис. 15. Добавление преобразователя движения
Выберите пункт Insert object/Positioning Axis. После этого на экране появится окно Parameter set for the X axis, представленное на рис. 16. В закладке Axis parameters указывается тип используемого преобразователя движения, его длина и размер поперечного сечения, а также подходящий тип двигателя.
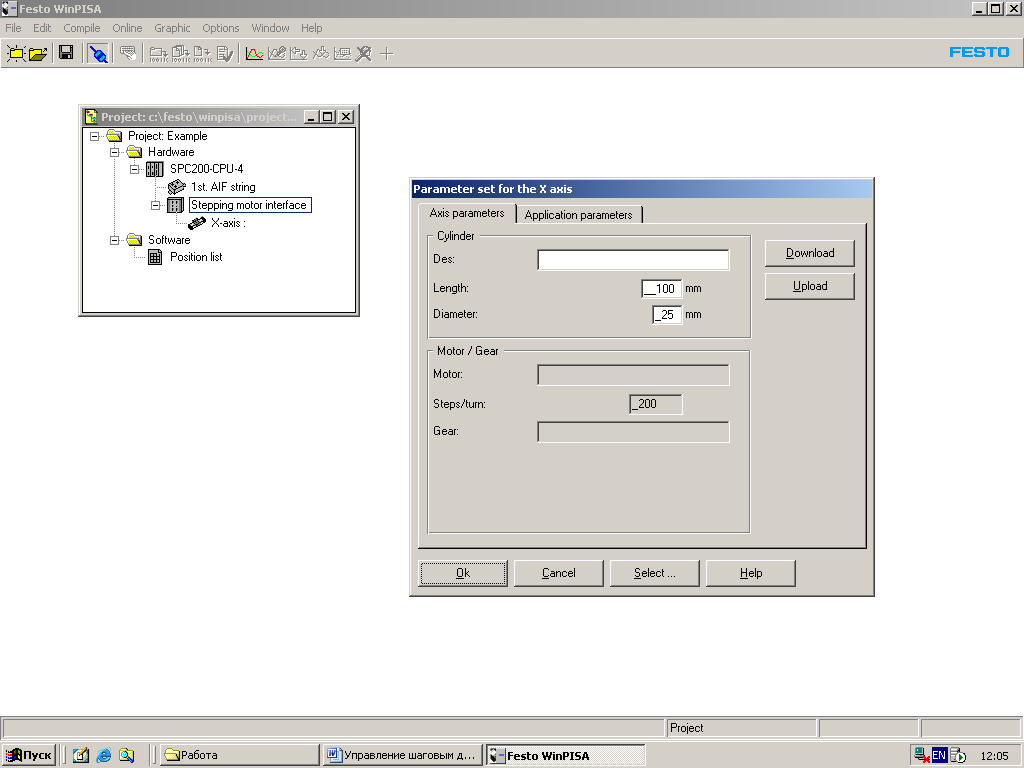
Рис. 16. Закладка Axis parameters окна Parameter set for the X axis
Можно задать все параметры, воспользовавшись библиотекой компонентов. Для выбора преобразователя движения из библиотеки компонентов нажмите кнопку Select. Появится окно Axis Selection (рис. 17), содержащее список преобразователей движения и соответствующих им двигателей. Выберите преобразователь движения DGE-18-ZR и шаговый двигатель MTR-ST57-48S-AA. После нажатия кнопки Ok данное оборудование появится в соответствующих строках закладки Axis Parameters.
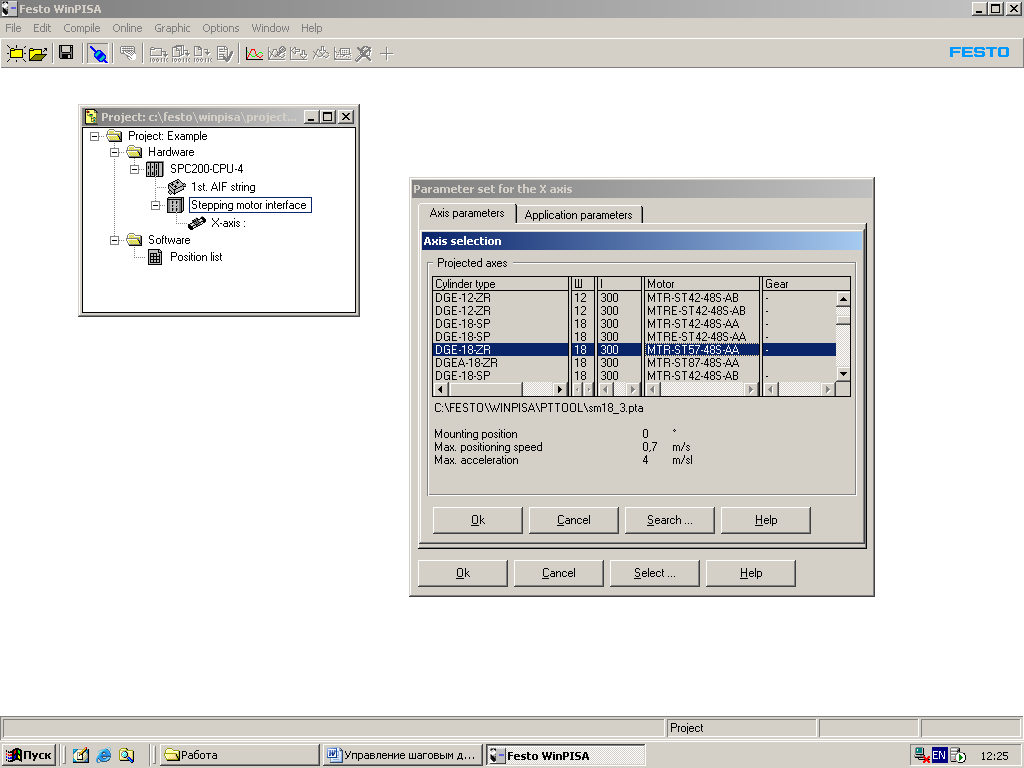
Рис. 17. Окно Axis Selection
Проверьте соответствие шаговых режимов программной и аппаратной части. В закладке Application Parameters, представленной на рис. 18, параметр Stepper mode должен совпадать с шаговым режимом, установленным DIP-переключателями на передней панели контроллера шагового двигателя SEC-ST.
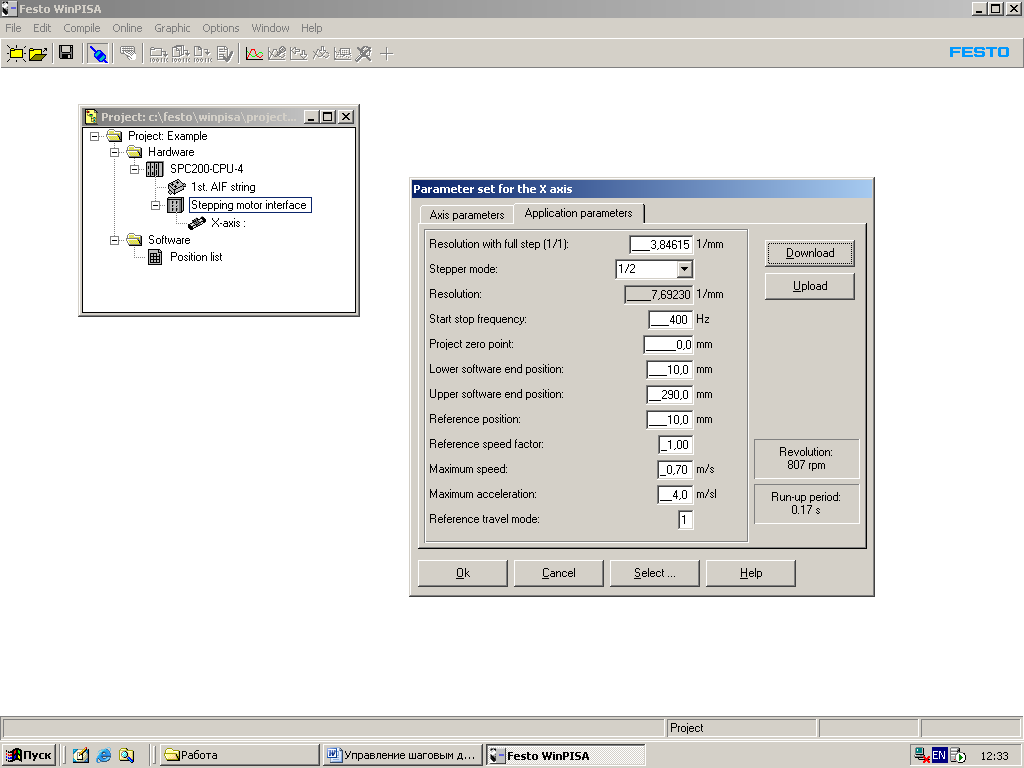
Рис. 18. Закладка Application parameters окна Parameter set for the X axis
Установите второй тип реперной точки Reference travel mode и скорость перемещения в реперную точку Reference speed factor, равную 1-10% от максимальной, в закладке Application parameters окна Parameters set for the X axis и загрузите обновленную конфигурацию в контроллер, нажав Download.
После того как конфигурация осей подобрана окно проекта будет иметь вид, представленный на рис. 19.
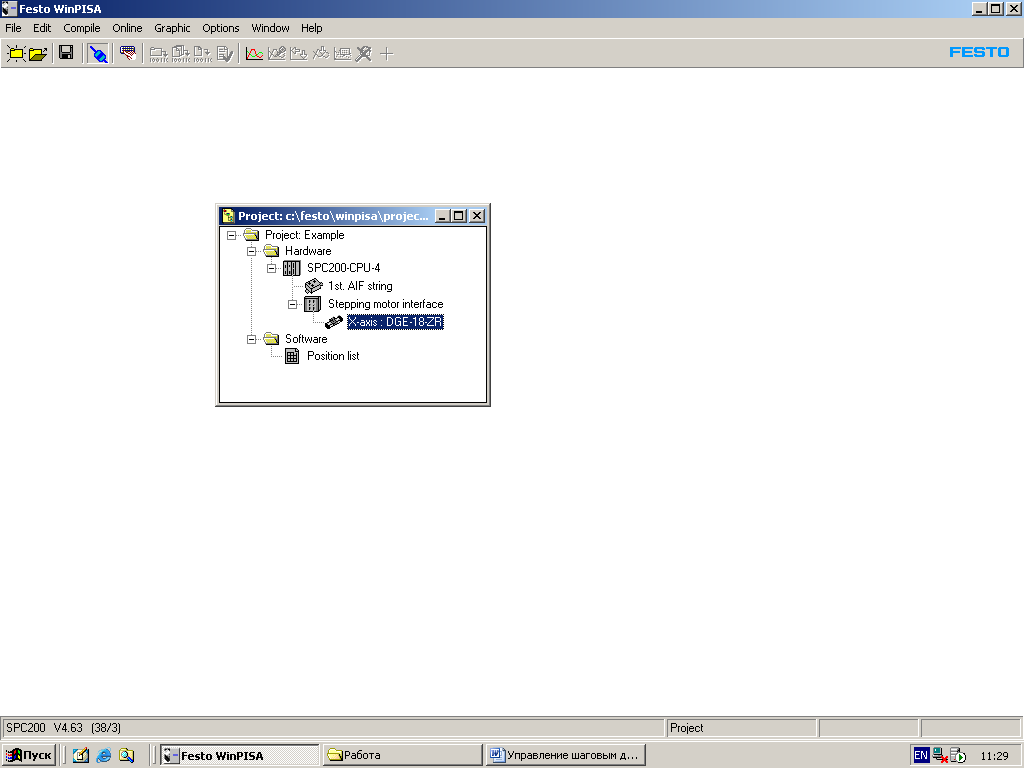
Рис. 19. Окно проекта
Выключите питание системы или нажмите кнопку Reset на панели контролера шагового двигателя SEC-ST и передвиньте каретку привода в середину преобразователя движения.
Поставьте DIP-переключатель I-Red. (понижение величины силы тока) на панели контроллера шагового двигателя в положение On (крайнее правое положение).
Установите DIP-переключатели 4, 5, 6 на панели контроллера SEC-ST таким образом, чтобы величина силы тока в обмотках шагового двигателя соответствовала величине силы тока 1,25 А.
На рис. 20 представлен метод задания величины силы тока (current) в обмотках ШД, а возможные состояния DIP-переключателей приведены в табл. 1.1.

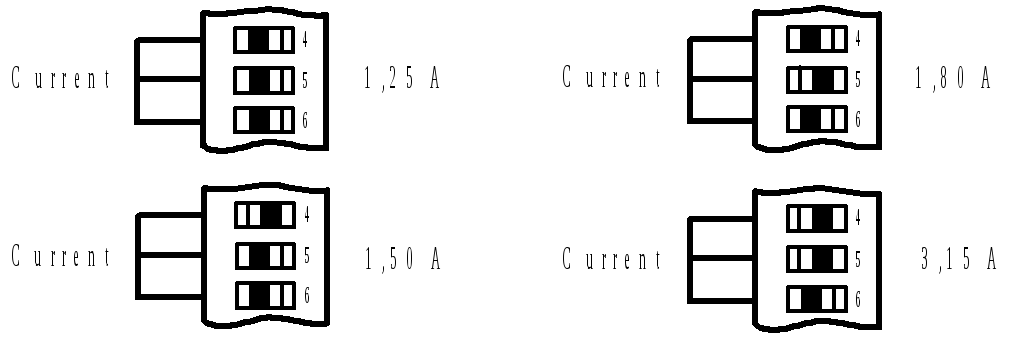
Рис. 20. Задание величины силы тока в обмотках ШД
Таблица 1.1
|
Ток, А |
DIP-переключатели | |||||
|
4 |
5 |
6 | ||||
|
Выкл. |
Вкл. |
Выкл. |
Вкл. |
Выкл. |
Вкл. | |
|
1,25 |
+ |
|
+ |
|
+ |
|
|
1,50 |
|
+ |
+ |
|
+ |
|
|
1,80 |
+ |
|
|
+ |
+ |
|
|
3,15 |
|
+ |
|
+ |
+ |
|
Включите питание системы или перезагрузите контроллер ШД путем нажатия кнопки Reset и убедитесь, что оба контроллера функционируют нормально. Индикаторы SPC200 Status LED и SEC-ST Power LED на координатном контроллере SPC200 и контроллере шагового двигателя SEC-ST соответственно при этом должны светиться зеленым.
В![]() ыберите
из главного меню пунктOnline/Online
mode
или нажмите
на иконку .Теперь можно управлять
системой в режиме реального времени.
ыберите
из главного меню пунктOnline/Online
mode
или нажмите
на иконку .Теперь можно управлять
системой в режиме реального времени.
Выберите в меню Online пункт Commissioning/Reference travel. В появившемся окне, представленном на рис. 21, установите Activity/Reference travel.
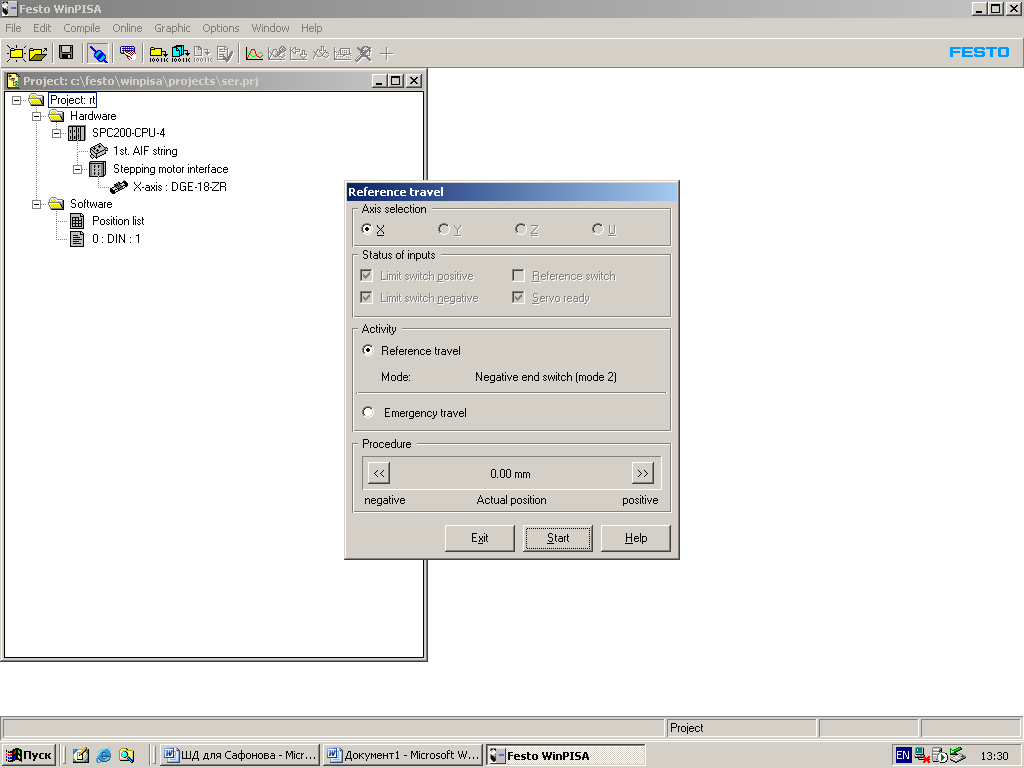
Рис. 21. Окно Reference travel
Нажмите и удерживайте кнопку Reset на передней панели контроллера шагового двигателя. Переместите каретку линейного привода в крайнее правое положение, не заходя за датчик конечного положения. Теперь нажмите кнопку Start в окне Reference travel и с помощью секундомера засеките время перемещения каретки в реперную точку. Определите расстояние, которое каретка привода преодолевает за это время и рассчитайте скорость перемещения каретки по формуле:
![]() , (6)
, (6)
где S – расстояние, м; t – время, c.
С помощью динамометра измерьте значение момента при установленном значении силы тока. Измерения при каждом значение величины силы тока проводите не менее трех раз.
Измените с помощью DIP-переключателя на передней панели контроллера шагового двигателя величину силы тока, протекающего в обмотках ШД на 1,5 А; 1,8 А и 3,15 А.
Повторите исследования скорости и момента каретки линейного привода при измененном значении величины силы тока в обмотках. После чего постройте графики зависимости скорости и момента от величины силы тока.
После проведения экспериментов, установите номинальное значение величины силы тока, протекающего в обмотках ШД, указанное на шильдике двигателя.
