

1.Решение прямой и обратной задачи
Формулы для решения прямой задачи о положении точки схвата:
Формулы для решения обратной задачи о положении точки схвата:
2.Построение рабочей зоны мехатронного устройства
Рабочее пространство промышленного робота — пространство, в котором может находиться мехатронное устройство.
Рабочая зона мехатронного устройства — пространство, в котором может находиться рабочий орган (например, рука) при функционировании мехатронного устройства.
Рабочая зона ограничивается сложной поверхностью огибающая все возможные положения. Рабочая зона оценивается объёмом формы, которые определяют функциональные возможности манипулятора. Знание границ рабочей зоны необходимо для сравнительной оценки двигательных возможностей различных конечностей манипулятора.
Для выявления рабочей зоны необходимо:
Структурная компоновка схемы, то есть число, взаимно расположенных степеней подвижности.
Ограничение на перемещение по степеням подвижности.
Геометрические размеры звеньев кинематической цепи манипулятора.
Если обобщенной координате q1 придать фиксированное значение 700мм, а обобщенную координату q3 будем изменять в пределах от 0 до 90˚ то точка С1 опишет дугу С1С2 радиусом R3 =1500мм с центром В1.
Если обобщенной координате q3 придать фиксированное значение 0 ˚, а обобщенную координату q1 будем изменять в пределах от 700 до 1200, то точка С2 опишет прямую С2D2 длиной 500мм.
Если обобщенной координате q1 придать фиксированное значение 1200мм, а обобщенную координату q3 будем изменять в пределах от 90 до 0˚, то точка D2 опишет дугу D2D1 радиусом R3 =1500мм.
Форма рабочей зоны примет вид, показанный на рис. 3

Рис. 2. Рабочая зона мехатронного устройства
3. Исследование динамических свойств манипулятора
Для механизмов с несколькими степенями свободы при голономных связях уравнения их движения составляют обычно в форме уравнений Лагранжа второго рода.
Применительно к исследуемой манипуляционной системе примут вид:
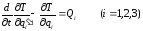 (1)
(1)
где
Т - кинетическая энергия системы; qi',-
обобщенные
скорости; qi
-
обобщенные
координаты;
Qi
- обобщенные силы; i
- число обобщенных координат;

Составим расчетную схему для построения динамической модели, с изображенными силами действия приводов, силами трения и обобщенными координатами (рис. 3).

Рис. 3. Расчетная схема.
Кинетическая энергия системы определится по формуле:

 (2)
(2)
где T1, T2, T3 – кинетические энергии звеньев; 1, совершающего поступательное движение, 2, 3 – вращательное движение.
Кинетическая энергия твердого тела в частных случаях находится с помощью данных формул:
1)при поступательном движении
 ,
(3)
,
(3)
где М – масса твердого тела; v – скорость поступательного движения;
2)при вращении вокруг неподвижной оси
 , (4)
, (4)
где
Jz
– момент инерции вокруг неподвижной
оси;
 – угловая скорость тела;
– угловая скорость тела;
3)при плоскопараллельном движении
 (5)
(5)
где vс – скорость центра тяжести тела; Iс – центр инерции тела относительно оси, проходящей через центр масс тела параллельно мгновенной оси вращения;
Кинетическая энергия Т1, совершающего поступательное движение, согласно формуле (3) будет равна
 ; (6)
; (6)
Кинетические энергии Т2, Т3, совершающих сложное движение, согласно формуле (5) будут равны:
 ; (7)
; (7)
 (8)
(8)
Подставляя результаты (6), (7), (8) в формулу (2) и расписывая момент инерции I, получаем:
 (9)
(9)
Для вычисления обобщенной силы Qi, соответствующей обобщенной координате qi, поступают следующим образом: сообщают системе такое виртуальное перемещение, при котором изменяется только эта координата qi, а все остальные координаты остаются неизменными, и вычисляют виртуальную работу всех активных сил на этом перемещении. Тогда множитель при вариации δqi в полученном выражении виртуальной работы δАj = Qi•δqi и будет обобщенной силой Qi.
Изобразим манипулятор в произвольный момент времени и сообщим системе такое виртуальное перемещение, при котором изменяется только обобщенная координата q3 (рис. 4), имея приращение δq3.
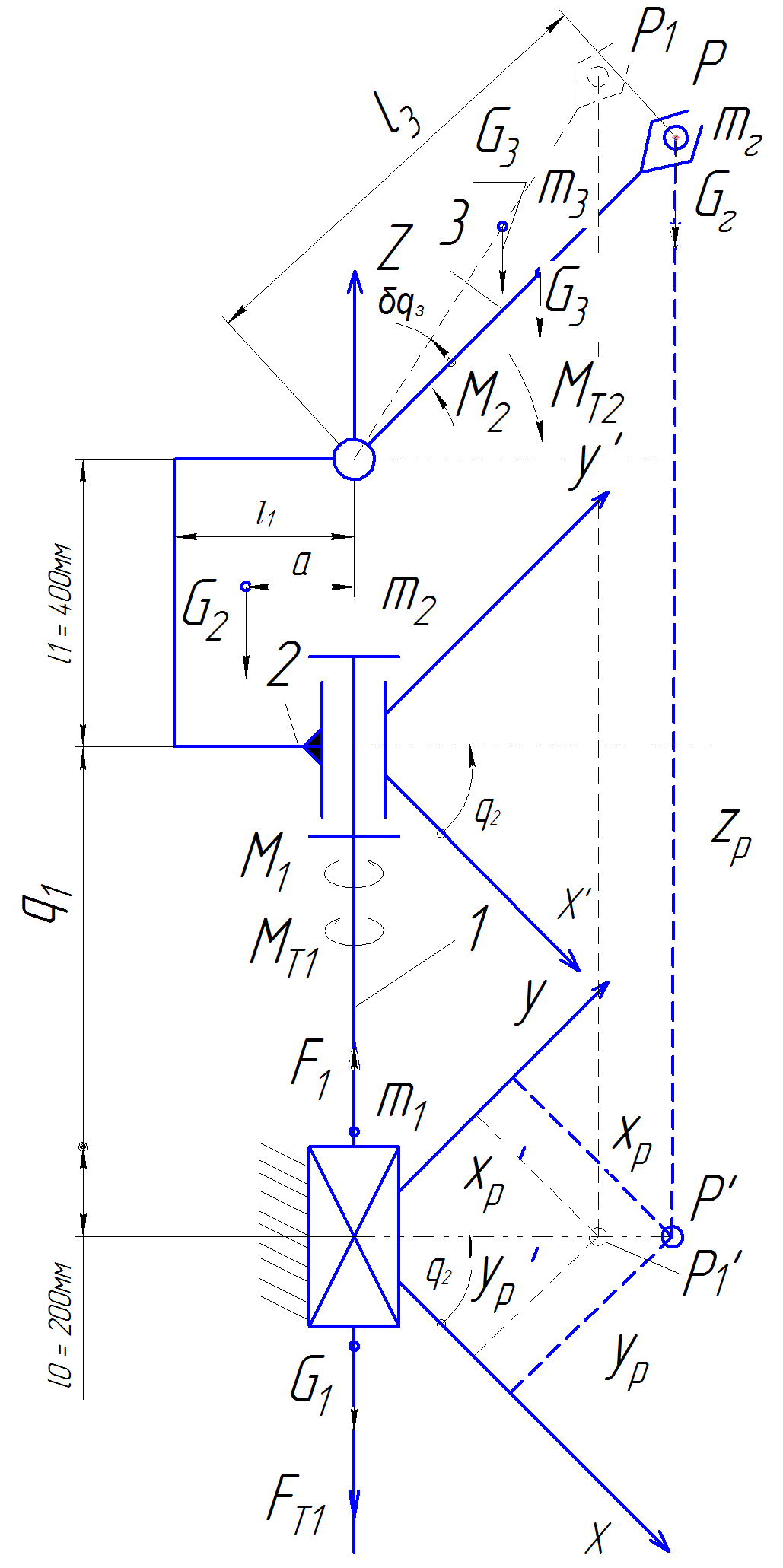
Рис. 4. Изменение обобщенной координаты q3
При этом точка P превратится в P1, точка P' превратится в P1'. Вычислим виртуальную работу всех активных сил на этом перемещении:
 .
(10)
.
(10)
Множитель при вариации δq3 в полученном выражении виртуальной работы и будет обобщенной силой Q3 :
 ,
(11)
,
(11)
где M1 – крутящий момент привода, действующий на звено 2;
MТ1 – момент трения при вращении звена 2;
M2 – крутящий момент привода, действующий на звено 3;
MТ2 – момент трения при вращении звена 3;
G2 – сила тяжести, действующая на звено 2;
G3 – сила тяжести, действующая на звено 3;
Gгр – сила тяжести, действующая на груз;
F1 – сила привода, действующая на звено 1;
FТ1 – сила трения, действующая при движении звена 1.
Поочередно
сообщая системе
возможные
приращения δS1,
 ,
,
 ,
соответствующие обобщенным координатамS1,
,
соответствующие обобщенным координатамS1,
 ,
, ,
определим соответствующие обобщенные
силы:
,
определим соответствующие обобщенные
силы:
 Q1
=
F1
–
FТ1
–
G1
– G2a
– G3cos
Q1
=
F1
–
FТ1
–
G1
– G2a
– G3cos /2–
Gг
cos
/2–
Gг
cos ;
;
Q2 = M1 – MТ1; (12)
Q3
= М2
– МТ2–
G3
cos /2–
Gг
cos
/2–
Gг
cos
Определим частные производные от кинетической энергии по обобщенным координатам и обобщенным скоростям:



 (13)
(13)
Подставляя полученные значения (12) и (13) в уравнения Лагранжа (1), получим



 F1
–
FТ1
–
G1
– G2a
– G3
cos
F1
–
FТ1
–
G1
– G2a
– G3
cos /2–Gг
cos
/2–Gг
cos
 =
M1
–
MТ1 (14)
=
M1
–
MТ1 (14)
 =
М2
– МТ2
–
G3
cos
=
М2
– МТ2
–
G3
cos /2–Gг
cos
/2–Gг
cos
Если в задаче требуется найти движение системы, то интегрируют составленные уравнения Лагранжа и определяют по начальным условиям произвольные постоянные интегрирования.
Если в задаче требуется найти неизвестные активные силы, то определяют их непосредственно из уравнений Лагранжа.
Если и задаче требуется определить неизвестные реакции, то, после нахождения из уравнений Лагранжа ускорений, следует применить принцип освобождаемости к соответствующим челам системы и воспользоваться основным уравнением динамики, либо принципом Даламбера, либо общим уравнением динамики.