

Пример организации конвейера:
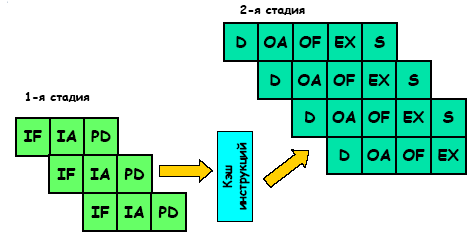
2 стадии, работающие асинхронно:
1) выборка команд, декодирование, формирование адреса.
кэш
2) выборка операндов, выполнение, сохранение.
-----------------------7-МПС_управляемые_потоком_данных.doc--------------------------------
Характеризуются независимым инициированием действий, что определяется готовностью команд. Принцип действия команд как и у МПС, управляемых потоками команд.
Сравним МПС управляемые потоками данных и МПС управляемые потоками команд:
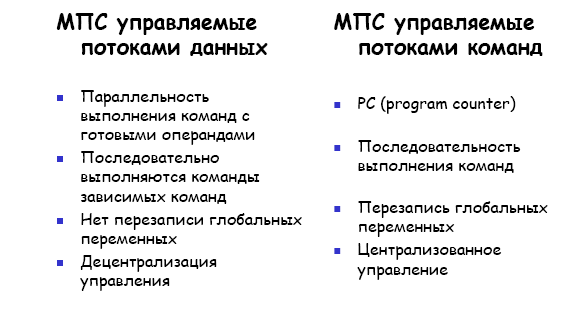
МПС управляемые потоками данных:
т. е если для 1-ой команды полностью готовы операнды(их значение известно), и в то же время для для 2-ой команды её операнды также готовы, то эти команды выполняются параллельно.
Например: если для h=add(a,b) известно значение “a” и значение “b”, и в то же время для g=sub(c, d) уже известно значение “с” “d” то они выполняются параллельно.
Например: если для h=add(a,b) известно значение “a” и значение “b”, и в то же время для g=sub(c, d) уже известно значение “с” “d” то они выполняются параллельно.
Но операция j=add(h,g) не может выполняться параллельно с ними, так как значения “h” и “g” станут известны только после выполнения этих операций.
Т.е j=add(h,g) выполняется последовательно после h=add(a,b) и g=sub(c, d).
![]()

МПС управляемые потоками команд:
Команды считываются из программной области данных по адресу, получаемому с помощью программного счетчика.
Команды выполняются последовательно одна за другой.

Управление осуществляется одним устройством – устройством управления.
Способы организации:
Прямой подход–взаимное соединение множества операционных устройств
Матричный подход–конфигурация связей необходимых операционных блоков формируется при помощи матричных переключателей
Универсальный подход–соединение операционных блоков выполняется логическим путем с помощью сети связи (Имеется специальное устройство для слежения за готовностью)
Характеристика:
Одна команда ->один результат
Одно операционное устройство
Последовательное выполнение
Возможность конвейеризации
Простое устройство управления
Легкость построения программного обеспечения (всегда можно контролировать программу)
------------------8-МПС_управляемые_потоком_запросов.doc--------------------------
Принцип действия:
Команды начинают выполняться в тот момент, когда результаты реализуемой ею обработки оказываются необходимы другим
Все действия выполняются параллельно
В таких МПС мы пытаемся решить задачу сразу «в лоб». Если для решения данных не достаточно, то задача разбивается на подзадачи, пока не будет достигнута точка, где есть все данные для решения.
Выставляем запрос, если он не выполняется ввиду нехватки данных, то порождается следующий запрос и т.д. «запрос порождает запрос».
Строится дерево, в узлах которого простые числа – результат, выполнение операций происходит от листьев к вершине.
Преимущества:
Анализ задачи по мере необходимости.
Нет нужды в анализе ненужных частей.
(т.е. не производятся вычисления, результат которых не будет использоваться)
Задача реализуется с самого её верхнего уровня.
(т.е. решаем задачу «в лоб»)
Реализация с запаздыванием
(требуется время на построение дерева запроса, это время не ограничено)
МПС управляемые потоками:
Команд:
Последовательное выполнение команд, записанных в программе.
Данных:
Параллельное выполнение (тех действий, которые обладают готовыми операндами)
Выполнение по готовности данных.
Запросами:
Параллельное выполнение запросов, расположенных на одном уровне.
Выполнение начнется, когда дерево будет полностью построено.
Как правило, на практике используются МПС, управляемые потоками команд. МПС, управляемы потоками данных и запросов сложны в реализации.
----------9-Планирование параллельной обработки информации.doc---------------------
Важность направления обуславливается необходимостью распараллеливания процесса обработки. Преследуется цель освобождения по возможности ядра ЦП от ненужной работы, т.е. перераспределения ресурсов системы для более эффективной работы.
Пример: частота поступления отсчётов в систему 106 отсчет/сек. Сколько времени необходимо на обработку?
Если последовательная обработка Т=10-6сек.
Если обработка = 40 оп. + и 40 оп.*, то Т=10-6/40 тактовая частота процессора – 1ГГц.
Разработка методов преобразования последовательных программ в параллельные, допускающие одновременное выполнение некоторого числа операций.
Типы планирования:
Статический – выполняется до начала работы МПС. Нужно составить расписание работы МПС. Процесс создания расписания требует достаточно больших временных ресурсов + нужны все составляющие для расчёта.
Динамический – выполняется в процессе решения системной задачи за счет использования части рабочего времени. При данном типе планирования имеется динамический планировщик.
Разделение алгоритмов планирования по трудоемкости и оптимальности:
Точные – трудоемкость и большие затраты времени. Характерны для статического планирования.

 ПЭ1
ПЭ3
ПЭ1
ПЭ3
В


 вод/вывод
Буф. эл-т
Ввод/вывод
вод/вывод
Буф. эл-т
Ввод/вывод
ПЭ2 ПЭ4
При данной структуре системы любой из ПЭ может обратиться к порту ввода/вывода или к другому ПЭ через буферный элемент (точный момент). Буфер должен обеспечивать связь между всеми ПЭ одновременно. ПЭ работает в зависимости от задачи.
Эвристические – легкость для универсальных МПС. При данных алгоритмах планирования можно грубо определить стартовую точку, которая будет изменяться, тем самым обеспечивая универсальность. Характерны для динамического планирования.
Точный метод статического планирования
Результат:
Огромные временные затраты на составление расписания и его реализацию.
Но: Распределение близкое к оптимальному.
Подходит только для конкретной решаемой задачи.
(т.е заменить задачу, но оставить планировщик уменьшить быстродействие)
Эвристический метод динамического планирования
Необходимость выбора первоначального распределения
Улучшение при помощи локальных преобразований
Необходимость учета временных диаграмм функционирования. Данная задача является одной из наиболее сложных.
3-е
устройство
I/O
2ГГц
ЦП 3ГГц


Возможность реконфигурации системы в процессе. ЦП можно предоставить любые куски кода, которые он будет выполнять, т.е задачи могут быть разными.
Эвристический метод динамического планирования
Результат:
Минимальные временные затраты на составление расписания и его реализацию. Достаточно составить только стартовый пакет.
Но необходимо выделить часть рабочего ресурса тратится на задачи управления.
Недостаточность или избыточность вычислительного ресурса для решаемой задачи. Как правило, применяется в универсальных системах.
Системы с динамическим планированием требуют наличия:
Динамического диспетчера. Наличие диспетчера обязательно.
Критериев распределения (по приоритетам обслуживания задач, по используемости ресурсов и т.д.).
Запас вычислительного ресурса (в связи с применением в универсальных системах).
Универсальность архитектуры МПС
Действия, выполняемые динамическим диспетчером:
Выбор начальной конфигурации
Составление плана выполнения вычислений (назначение вычислительным задачам приоритетов).
Использование резерва (при условии нарушения работоспособности части системы).
Возможность перераспределения задач в МПС (т.к. система универсальна).
Контроль параллельного процесса вычисления
Оценка качества применяемых методов планирования параллельной обработки:
Создаются специальныемодельные программы
Учет временных диаграмм хода выполнения
Исследование отказов и сбоев работы системы (пускаем систему по наихудшему из путей).
-------------------------------------------10-Показатели качества.doc-----------------------------