

29. Определение импульсной переходной функции по входу и выходу (детерминированных процессов)
По уравнению
 (*).
(*).
По теореме свертки полинием листами:

![]() при
при
![]() :
:
![]() - после после
диакретизацмм.
- после после
диакретизацмм.

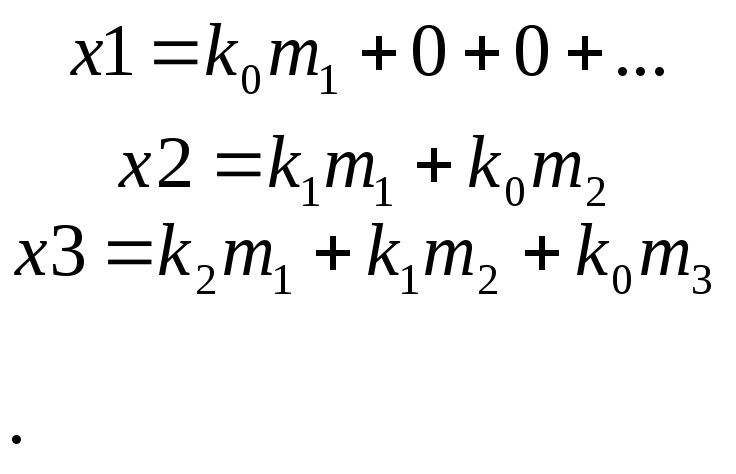
Из 1-го -
![]()
Из 2-го –
![]()
Из 3 го –
![]()
И.т.д.
Здесь д.б. помех! (см. ур-е (*))
30. Описание дискретных систем уравнениями в конечных разностях
Сигналы деляться на непрерывные и дискретные.
Непрерывный(аналогавый) – ф-ция определена в любой момент времени.
Дискретные деляться на цифровые и импульсные. Д.с. могут быть математической абстракцией:
 дискретные
сигналы которые существуют в определенные
моменты времени.
дискретные
сигналы которые существуют в определенные
моменты времени.
В ТАУ существует аналогия между перобразователями непрерывных сигналов и дискретных. Условная математическая модель непрерывной системы:
(д.у. n-ого порядка)
![]() (1)
(1)
Уравнение в конечных разностях (применяеться в теории дискретных систем)
![]()
![]() (2)
(2)
![]() -конечная
разность
-конечная
разность
![]()
Конечная разность играет роль производной (нисходящая)

![]()
конечная разность :
![]() (определение по
текущему и 2-х предшествующих и т.д.)
(определение по
текущему и 2-х предшествующих и т.д.)
Оператор запаздывания
на ед. Дискретного времени обозначаеться
![]()
![]()
Запишем в операторной форме:
![]() (i-ая
разность)
(i-ая
разность)
![]()
Основная модель дискретных систем управления
![]()
это дискретное уравнение :по значениями неизвестных в пред мом врем опред след мом врем.
Разностное уравнение:
![]()
в операторной форме:
![]()
![]()
Переход к разностному уравнению:
Пример 1)
![]()
t=iT

Пример 2) Пусть
![]() - сумма вклада в начаеi-того
месяца. Она складываеться из поступлений
за прошедший месяц + старая сумма +%
- сумма вклада в начаеi-того
месяца. Она складываеться из поступлений
за прошедший месяц + старая сумма +%
![]()
(не интересует что в среднем месяце)
31. Z-передаточная функция дискретной системы.

![]() - (для физ. Осуществимых
систем).
- (для физ. Осуществимых
систем).
Математически:

![]()
Самые важные типовые сигналы:
1)

Найти имп.-пер. ф-wv. Можно по кр. Мере 2-мя сп:
падать на вход б-ф-ю и, пользуясь рекуррентными соотношениями найти её.
Взять обратное преобр-е п.ф:
Если дана W(Z) в виде дроби, то обратное Z-преобр-е можно получить делением числителя на знаменатель.
![]()


2) Единичная ступенчатая ф-цыя.
Найти Z-преобр-е.
Реакция системы на един. ступ. функцию есть…
32 Условие устойчивости линейной дискретной системы. Критерий Рауса-Гурвица.
Если система была выведена из устойчивого состояния под некоторыми воздействиями, и если она затем вернется в исходное состояние, то система устойчива, если не вернется, то не устойчива.
Мат. Модель
д.у.![]() разностное
уравнение
разностное
уравнение![]()
Поведение системы, выраженное разност уравнением.
Решение складывается
из общего решения однородного уравнения.
Общее решение описывает собственные
колебания:
![]()
C*i-произвольные коэффициенты.
![]() -это
норм. характеристич. разность уравнения.
-это
норм. характеристич. разность уравнения.
Характеристическое
уравнение это:![]()
Если мы найдем
норм X
и Y(конкретные
значения, зависящие от параметров,
![]() )
и подставив в уравнение найдем то найдем
)
и подставив в уравнение найдем то найдем![]() конкретные
норм и конкретные значения дают конкретный
процесс.
конкретные
норм и конкретные значения дают конкретный
процесс.
2-опис собствен колебаний.
![]()
Корни x и y собст. колебания. Это выражение справедливо, когда корни простые.
Система устойчива
если корни по модулю меньше единицы.![]()
Для устойчивой системы корни находятся в окружности единичного радиуса.
Собственные колебания б/затухать - достаточно устойчивы. Как в непрерывных системах.
Критерий устойчивости позволяет следить за устойчивостью без вычисления корней.
Критерий устойчивости делятся на: частотные и алгебраические.
Переход от t-преобр к W- преобр:
W-преобр это билинейное уравнение:
![]() W-псевдочастота
W-псевдочастота
Если в x
y
от переменной t(z)
перейти к переменной W,
то получится x
у относительно W:
![]()
![]()
Осуществляется переход от (4) к (5) и для него справедливы все критерии устойчивости.
Критерий Рауса-Гурвица.
![]()
Z-комплексное число на комплексной плоскости. Преобразование одного комплексного числа в другое. Плоскость Z преобразуется в плоскость W и наоборот.
W-преобразует окр. ед. радиуса плоскости, а внутренняя часть ед. радиуса преобразуется в полуплоскость.