

5 Feature-Based Methods in 3D Shape Analysis |
213 |
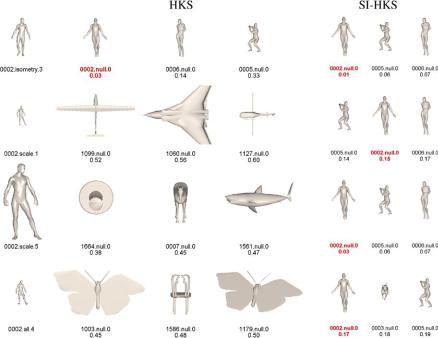
Fig. 5.9 Retrieval results using bags of features computed with HKS and SI-HKS, tested on the SHREC’10 robust large-scale shape retrieval dataset. Left: query shapes, middle: first three matches obtained with HKS descriptors, right: first three matches obtained with SI-HKS descriptors. Only a single correct match exists in the database (marked in red), and ideally, it should be the first one
features to correctly find similarity between scaled shapes, which makes the use of SI-HKS preferable over HKS in problems involving arbitrary shape scaling.
5.5 Research Challenges
Current challenges in descriptor research include finding a good proportion between theoretical invariance, discriminativity, sensitivity to noise and computational complexity. A single ideal tradeoff is unlikely to be found, since these parameters heavily depend on the application.
Another important challenge of interest both in 2D image and 3D shape analysis is incorporating spatial relations between features. Most feature descriptors capture only local information of the shape, while it is known that, in many cases, the spatial relations between different features are not less important. For example, on a human hand one would find five similar features corresponding to fingers, while their particular spatial configuration is what makes the object recognizable as a hand. Taking this example ad absurdum, one can think of a “soup of features” which have no clear
214 |
A.M. Bronstein et al. |
spatial configuration. Recent works on symmetry [40, 59, 62, 66, 67], self-similarity [18, 64] and structure detection is a step in this direction.
5.6 Conclusions
This chapter described feature-based methods in 3D shape analysis that are commonly used in applications such as content-based shape retrieval and invariant shape correspondence. Though not completely new, this field is relatively unexplored in shape analysis and has lagged behind similar methods in 2D image analysis. The success of feature-based methods in computer vision has recently brought significant interest for developing similar approaches in shape analysis, either by finding analogies to 2D image features, or by exploiting 3D shape-specific construction.
This chapter tried to overview the basic ideas and principles in modern featurebased shape analysis models, placing an emphasis on feature detection and description, their invariance and quality. For different applications of these methods (e.g. in shape retrieval), the reader is referred to other chapters in this book.
It should be understood that feature-based shape analysis is a complicated pipeline with inter-dependent stages and, in particular, feature detection and description is a linked pair of operations. In some cases, the link is very natural and homogeneous and falls under the same mathematical model. For example, heat kernels can be used for both detection (heat kernel features) and description (heat kernel signatures).
More generically, it is possible to use different methods for feature detection and description. However, it is important to understand the strengths and limitations of each approach, which are often dependent on the data in hand. For example, one might use Gaussian curvature extrema as a detector, but then using spin images as a descriptor could be a bad idea, since they depend on the normal and Gaussian curvature extrema are exactly where this normal is changing the most.
5.7 Further Reading
For a broad overview of geometric foundations and algorithms in shape analysis, we refer the reader to [16]. For an excellent comprehensive treatment of differential and Riemannian geometry the reader is referred to [28] and [7]. While focusing on local features in this chapter, we intentionally completely left aside an interesting and broad field on global or holistic shape descriptors based on global geometric quantities such as metric distributions. The reader is referred to the chapter on manifold intrinsic similarity in [72] for an overview of these methods. An introduction to diffusion geometry and diffusion maps can be found in [25]. Details of SHREC’10 benchmarks mentioned in this chapter appear in [12–14]. Algorithms for dimensionality reduction and hashing of descriptors in the context of deformable shape retrieval are discussed in [11, 79]. For additional details on shape retrieval, refer to Chap. 7 of this book.
5 Feature-Based Methods in 3D Shape Analysis |
215 |
5.8 Questions
1.Give three example applications where feature-based methods in 3D shape analysis are useful.
2.What qualities do we look for in a good feature detector?
3.What qualities do we look for in a good feature descriptor?
4.Explain why descriptor invariance and the information richness of a descriptor often need to be traded-off against each other. Use spin images as an example in your argument.
5.Explain why Gaussian curvature is an intrinsic shape property, whereas mean curvature is not.
6.Outline how heat kernel signatures can be used to determine a set of correspondences across two shapes.
7.Explain the effect of global uniform shape scaling of the shape on the eigenfunctions and eigenvalues of the Laplace-Beltrami operator.
5.9 Exercises
1.Compute the Gaussian curvature map on a 3D shape and display it as a colormap. Which points have positive Gaussian curvature? Negative curvature?
2.Repeat Exercise 1 using several local scales. How does it affect the result?
3.Determine the local extrema of the Gaussian curvature at the most suitable scale. Display the detected points by overlaying them on the 3D shape.
4.Compute a set of descriptors at the points detected in Exercise 3. As the descriptor at each point, use the coordinates x, y, z. Under what circumstances is x, y, z a good/poor choice of descriptor with this particular detector?
5.Match the descriptors across a pair of facial scans of the same person using simple Euclidean metric. Note the problems matching across the symmetrical face. Suggest solutions to this problem of point matching for symmetrical objects.
6.Given a shape represented as a triangular mesh, discretize the Laplace-Beltrami operator using the cotangent weights formula. Compute and show the eigenvalues and eigenfunctions of the Laplace-Beltrami operator.
7.Test the effect of shape transformations on the eigenvalues and eigenfunctions of the Laplace-Beltrami operator. Experimentally confirm their bendinginvariance.
8.Using the eigenvalues and eigenfunctions of the Laplace-Beltrami operator, compute the heat kernel. Show the heat kernel diagonal values at points of different curvature.
9.Using the heat kernel diagonal, compute the HKS descriptor. Test its behavior for different values of time scale.
10.Compute dense HKS descriptor on multiple shapes (use for example the SHREC dataset). Create a geometric vocabulary by clustering in the HKS descriptor space. Compute a bag of features by means of vector quantization of
216 |
A.M. Bronstein et al. |
the descriptors in the geometric vocabulary. Compare different settings of hard and soft quantization.
11.Using bags of features computed in Exercise 10, perform shape retrieval on a dataset of shapes undergoing deformations. Experimentally observe invariance and sensitivity of the descriptors.
References
1.Agarwal, P.K., Edelsbrunner, H., Harer, J., Wang, Y.: Extreme elevation on a 2-manifold. In: SCG’04: Proceedings of the twentieth annual symposium on Computational Geometry,
pp.357–365 (2004)
2.Andreetto, M., Brusco, N., Cortelazzo, G.M.: Automatic 3D modeling of textured cultural heritage objects. IEEE Trans. Image Process. 13(3), 335–369 (2004)
3.Assfalg, J., Bertini, M., Pala, P., Del Bimbo, A.: Content-based retrieval of 3d objects using spin image signatures. IEEE Trans. Multimed. 9(3), 589–599 (2007)
4.Bay, H., Tuytelaars, T., Van Gool, L.: SURF: speeded up robust features. In: Proc. ECCV,
pp.404–417 (2006)
5.Belongie, S., Malik, J., Puzicha, J.: Shape matching and object recognition using shape contexts. Trans. PAMI, 509–522 (2002)
6.Ben-Chen, M., Weber, O., Gotsman, C.: Characterizing shape using conformal factors. In: Proc. 3DOR (2008)
7.Berger, M.: A Panoramic View of Riemannian Geometry. Springer, Berlin (2003)
8.Besl, P.J.: Surfaces in Range Image Understanding. Springer, Berlin (1988)
9.Besl, P.J., Jain, R.C.: Invariant surface characteristics for 3d object recognition in range images. Comput. Vis. Graph. Image Process. 33(1), 33–80 (1986)
10.Bronstein, A., Bronstein, M., Bruckstein, A., Kimmel, R.: Partial similarity of objects, or how to compare a centaur to a horse. Int. J. Comput. Vis. 84(2), 163–183 (2009)
11.Bronstein, A., Bronstein, M., Guibas, L., Ovsjanikov, M.: Shape Google: geometric words and expressions for invariant shape retrieval. ACM Trans. Graph. 30(1) (2011)
12.Bronstein, A.M., Bronstein, M.M., Bustos, B., Castellani, U., Crisani, M., Falcidieno, B., Guibas, L.J., Isipiran, I., Kokkinos, I., Murino, V., Ovsjanikov, M., Patané, G., Spagnuolo, M., Sun, J.: Shrec 2010: robust feature detection and description benchmark. In: Proc. 3DOR (2010)
13.Bronstein, A.M., Bronstein, M.M., Castellani, U., Falcidieno, B., Fusiello, A., Godil, A., Guibas, L.J., Kokkinos, I., Lian, Z., Ovsjanikov, M., Patané, G., Spagnuolo, M., Toldo, R.: Shrec 2010: robust large-scale shape retrieval benchmark. In: Proc. 3DOR (2010)
14.Bronstein, A.M., Bronstein, M.M., Castellani, U., Guibas, A.D.L.J., Horaud, R.P., Kimmel, R., Knossow, D., von Lavante, E., Mateus, D., Ovsjanikov, M., Sharma, A.: Shrec 2010: robust correspondence benchmark. In: Proc. 3DOR (2010)
15.Bronstein, A.M., Bronstein, M.M., Kimmel, R.: Three-dimensional face recognition. Int. J. Comput. Vis. 64(1), 5–30 (2005)
16.Bronstein, A.M., Bronstein, M.M., Kimmel, R.: Numerical Geometry of Non-rigid Shapes. Springer, New York (2008)
17.Bronstein, A.M., Bronstein, M.M., Kimmel, R., Mahmoudi, M., Sapiro, G.: A GromovHausdorff framework with diffusion geometry for topologically-robust non-rigid shape matching. In: IJCV (2010)
18.Bronstein, A.M., Bronstein, M.M., Mitra, N.J.: Intrinsic regularity detection in 3D geometry. In: Proc. ECCV (2010)
19.Bronstein, A.M., Bronstein, M.M., Ovsjanikov, M., Guibas, L.J.: Shape Google: a computer vision approach to invariant shape retrieval. In: Proc. NORDIA (2009)
5 Feature-Based Methods in 3D Shape Analysis |
217 |
20.Bronstein, M.M., Kokkinos, I.: Scale-invariant heat kernel signatures for non-rigid shape recognition. In: Proc. CVPR (2010)
21.Castellani, U., Cristani, M., Fantoni, S., Murino, V.: Sparse points matching by combining 3D mesh saliency with statistical descriptors. Comput. Graph. Forum 27, 643–652 (2008)
22.Chazal, F., Guibas, L., Oudot, S., Skraba, P.: Persistence-based clustering in Riemannian manifolds. In: Proceedings of the 27th annual ACM symposium on Computational Geometry (2009)
23.Chum, O., Philbin, J., Sivic, J., Isard, M., Zisserman, A.: Total recall: automatic query expansion with a generative feature model for object retrieval. In: Proc. ICCV (2007)
24.Clarenz, U., Rumpf, M., Telea, A.: Robust feature detection and local classification for surfaces based on moment analysis. IEEE Trans. Vis. Comput. Graph. 10(5), 516–524 (2004)
25.Coifman, R., Lafon, S.: Diffusion maps. Appl. Comput. Harmon. Anal. 21(1), 5–30 (2006)
26.Dey, T.K., Li, K., Luo, C., Ranjan, P., Safa, I., Wang, Y.: Persistent heat signature for Poseoblivious matching of incomplete models. In: Proc. SGP, pp. 1545–1554 (2010)
27.Digne, J., Morel, J., Audfray, N., Mehdi-Souzani, C.: The level set tree on meshes. In: Fifth International Symposium on 3D Data Processing, Visualization and Transmission (3DPVT’10) (2010)
28.Do Carmo, M.: Differential Geometry of Curves and Surfaces, vol. 2. Prentice-Hall, Englewood Cliffs (1976)
29.Edelsbrunner, H., Harer, J.: Computational Topology. An Introduction. Am. Math. Soc., Providence (2010)
30.Edelsbrunner, H., Letscher, D., Zomorodian, A.: Topological persistence and simplification. Discrete Comput. Geom. 28(4), 511–533 (2002)
31.Elad, A., Kimmel, R.: On bending invariant signatures for surfaces. IEEE Trans. Pattern Anal. Mach. Intell. 25(10), 1285–1295 (2003)
32.Floater, M.S., Hormann, K.: Surface parameterization: a tutorial and survey. Adv. Multiresol. Geom. Model. 1 (2005)
33.Gebal, K., Bærentzen, J.A., Aanæs, H., Larsen, R.: Shape analysis using the auto diffusion function. Comput. Graph. Forum 28(5), 1405–1413 (2009)
34.Gelfand, N., Mitra, N.J., Guibas, L.J., Pottmann, H.: Robust global registration. In: Proc. SGP (2005)
35.Glomb, P.: Detection of interest points on 3D data: extending the Harris operator. In: Computer Recognition Systems 3. Advances in Soft Computing, vol. 57, pp. 103–111. Springer, Berlin (2009)
36.Harris, C., Stephens, M.: A combined corner and edge detection. In: Proc. Fourth Alvey Vision Conference, pp. 147–151 (1988)
37.Itti, L., Koch, C., Niebur, E.: A model of saliency-based visual attention for rapid scene analysis. Trans. PAMI 20(11) (1998)
38.Johnson, A., Spin-images: a representation for 3-d surface matching. Ph.D. thesis, Carnegie Mellon University (1997)
39.Johnson, A.E., Hebert, M.: Using spin images for efficient object recognition in cluttered 3D scenes. IEEE Trans. Pattern Anal. Mach. Intell. 21(5), 433–449 (1999)
40.Kazhdan, M., Funkhouser, T., Rusinkiewicz, S.: Symmetry descriptors and 3D shape matching. In: Proc. SGP, pp. 115–123 (2004)
41.Kim, V.G., Lipman, Y., Funkhouser, T.: Blended intrinsic maps. In: Proc. SIGGRAPH (2011)
42.Koehl, P.: Protein structure similarities. Curr. Opin. Struct. Biol. 11(3), 348–353 (2001)
43.Koenderink, J.J., van Doorn, A.J.: Surface shape and curvature scales. Image Vis. Comput. 10(8), 557–564 (1992)
44.Kokkinos, I., Yuille, A.: Scale invariance without scale selection. In: Proc. CVPR (2008)
45.Kolomenkin, M., Shimshoni, I., Tal, A.: On edge detection on surfaces. In: Proc. CVPR (2009)
46.Körtgen, M., Park, G., Novotni, M., Klein, R.: 3d shape matching with 3d shape contexts. In: Central European Seminar on Computer Graphics (2003)
218 |
A.M. Bronstein et al. |
47.Kovnatsky, A., Bronstein, M.M., Bronstein, A.M., Kimmel, R.: Photometric heat kernel signatures. In: Proc. Conf. on Scale Space and Variational Methods in Computer Vision (SSVM) (2011)
48.Lévy, B.: Laplace-Beltrami eigenfunctions towards an algorithm that “understands” geometry. In: Int. Conf. Shape Modeling and Applications (2006)
49.Litman, R., Bronstein, A.M., Bronstein, M.M.: Diffusion-geometric maximally stable component detection in deformable shapes. In: Computers and Graphics (2011)
50.Lo, T., Siebert, J.: Local feature extraction and matching on range images: 2.5 D SIFT. Comput. Vis. Image Underst. 113(12), 1235–1250 (2009)
51.Lowe, D.: Distinctive image features from scale-invariant keypoint. In: IJCV (2004)
52.Magid, E., Soldea, O., Rivlin, E.: A comparison of Gaussian and mean curvature estimation methods on triangular meshes of range image data. Comput. Vis. Image Underst. 107(3), 139– 159 (2007)
53.Mahmoudi, M., Sapiro, G.: Three-dimensional point cloud recognition via distributions of geometric distances. Graph. Models 71(1), 22–31 (2009)
54.Manay, S., Hong, B., Yezzi, A., Soatto, S.: Integral invariant signatures. In: Computer VisionECCV 2004, pp. 87–99 (2004)
55.Matas, J., Chum, O., Urban, M., Pajdla, T.: Robust wide-baseline stereo from maximally stable extremal regions. Image Vis. Comput. 22(10), 761–767 (2004)
56.Mateus, D., Horaud, R.P., Knossow, D., Cuzzolin, F., Boyer, E.: Articulated shape matching using Laplacian eigenfunctions and unsupervised point registration. In: Proc. CVPR (2008)
57.Meyer, M., Desbrun, M., Schroder, P., Barr, A.H.: Discrete differential-geometry operators for triangulated 2-manifolds. In: Visualization and Mathematics III, pp. 35–57 (2003)
58.Mitra, N.J., Guibas, L.J., Giesen, J., Pauly, M.: Probabilistic fingerprints for shapes. In: Proc. SGP (2006)
59.Mitra, N.J., Guibas, L.J., Pauly, M.: Partial and approximate symmetry detection for 3D geometry. ACM Trans. Graph. 25(3), 560–568 (2006)
60.Najman, L., Couprie, M.: Building the component tree in quasi-linear time. IEEE Trans. Image Process. 15(11), 3531–3539 (2006)
61.Natarajan, V., Koehl, P., Wang, Y., Hamann, B.: Visual analysis of biomolecular surfaces. In: Visualization in Medicine and Life Sciences, Mathematics and Visualization, pp. 237–255 (2008)
62.Ovsjanikov, M., Sun, J., Guibas, L.J.: Global intrinsic symmetries of shapes. Comput. Graph. Forum 27(5), 1341–1348 (2008)
63.Pauly, M., Keiser, R., Gross, M.: Multi-scale feature extraction on point-sampled surfaces. Comput. Graph. Forum 22(3), 281–289 (2003)
64.Pauly, M., Mitra, N.J., Wallner, J., Pottmann, H., Guibas, L.J.: Discovering structural regularity in 3D geometry. In: Proc. SIGGRAPH (2008)
65.Pinkall, U., Polthier, K.: Computing discrete minimal surfaces and their conjugates. Exp. Math. 2(1), 15–36 (1993)
66.Raviv, D., Bronstein, A.M., Bronstein, M.M., Kimmel, R.: Symmetries of non-rigid shapes. In: Proc. NRTL (2007)
67.Raviv, D., Bronstein, A.M., Bronstein, M.M., Kimmel, R., Sapiro, G.: Diffusion symmetries of non-rigid shapes. In: Proc. 3DPVT (2010)
68.Raviv, D., Bronstein, M.M., Bronstein, A.M., Kimmel, R.: Volumetric heat kernel signatures. In: Proc. ACM Multimedia Workshop on 3D Object Retrieval (2010)
69.Reuter, M.: Hierarchical shape segmentation and registration via topological features of Laplace-Beltrami eigenfunctions. Int. J. Comput. Vis. 89(2), 287–308 (2010)
70.Reuter, M., Wolter, F.E., Peinecke, N.: Laplace-spectra as fingerprints for shape matching. In: Proc. ACM Symp. Solid and Physical Modeling, pp. 101–106 (2005)
71.Rustamov, R.M.: Laplace-Beltrami eigenfunctions for deformation invariant shape representation. In: Proc. SGP, pp. 225–233 (2007)
72.Scherzer, O.: Handbook of Mathematical Methods in Imaging. Springer, Berlin (2010)
5 Feature-Based Methods in 3D Shape Analysis |
219 |
73.Shilane, P., Funkhauser, T.: Selecting distinctive 3D shape descriptors for similarity retrieval. In: Proc. Shape Modelling and Applications (2006)
74.Sipiran, I., Bustos, B.: A robust 3D interest points detector based on Harris operator. In: Proc. 3DOR, pp. 7–14. Eurographics (2010)
75.Sivic, J., Zisserman, A.: Video Google: A text retrieval approach to object matching in videos. In: Proc. CVPR (2003)
76.Skraba, P., Ovsjanikov, M., Chazal, F., Guibas, L.: Persistence-based segmentation of deformable shapes. In: Proc. NORDIA, pp. 45–52 (2010)
77.Sochen, N., Kimmel, R., Malladi, R.: A general framework for low level vision. IEEE Trans. Image Process. 7(3), 310–318 (1998)
78.Starck, J., Hilton, A.: Correspondence labelling for widetimeframe free-form surface matching. In: Proc. ICCV (2007)
79.Strecha, C., Bronstein, A.M., Bronstein, M.M., Fua, P.: LDAHash: improved matching with smaller descriptors. Technical Report, EPFL (2010)
80.Sumner, R.W., Popovic,´ J.: Deformation transfer for triangle meshes. In: Proc. Conf. Computer Graphics and Interactive Techniques, pp. 399–405 (2004)
81.Sun, J., Ovsjanikov, M., Guibas, L.: A concise and provably informative multi-scale signature based on heat diffusion. Comput. Graph. Forum 28(5), 1383–1392 (2009)
82.Thorstensen, N., Keriven, R.: Non-rigid shape matching using geometry and photometry. In: Proc. CVPR (2009)
83.Toldo, R., Castellani, U., Fusiello, A.: Visual vocabulary signature for 3D object retrieval and partial matching. In: Proc. 3DOR (2009)
84.Torresani, L., Kolmogorov, V., Rother, C.: Feature correspondence via graph matching: models and global optimization. In: Proc. ECCV, pp. 596–609 (2008)
85.Wang, C., Bronstein, M.M., Bronstein, A.M., Paragios, N.: Discrete minimum distortion correspondence problems for non-rigid shape matching. In: Proc. Conf. on Scale Space and Variational Methods in Computer Vision (SSVM) (2011)
86.Wardetzky, M., Mathur, S., Kälberer, F., Grinspun, E.: Discrete Laplace operators: no free lunch. In: Conf. Computer Graphics and Interactive Techniques (2008)
87.Zaharescu, A., Boyer, E., Varanasi, K., Horaud, R.: Surface feature detection and description with applications to mesh matching. In: Proc. CVPR (2009)