

Л8
.docxОтчёт по лабораторной работе №8
Синтез цифровых регуляторов методами теории
дискретных систем
Вариант: 13
Модель объекта
Непрерывная модель объекта:
Дискретная передаточная функция объекта (здесь и далее в левом столбце – данные для исходного интервала квантования, справа – для интервала, который в 2 раза меньше заданного):
-
T = 0.6 с
T = 0.3 c


Дискретная передаточная функция объекта в формате «нули-полюса»:

Дискретная передаточная функция объекта в переменной :


Апериодическое управление (управление с конечной длительностью переходных процессов
Дискретная передаточная функция цифрового регулятора (от переменной ):


Характеристический полином замкнутой системы (от переменной ):
-
() = 1 -1.110D-16q² -1.110D-16q³
() = 1 +4.441D-16q² +2.220D-16q³
Характеристический полином не совпадает с желаемым.
Дискретная передаточная функция цифрового регулятора (от переменной z):


Дискретная передаточная функция регулятора в формате «нули-полюса»:


Выводы (сокращаются ли регулятором нули и полюса объекта в произведении D(z)·C(z)? Если да, какие именно?):
-
Сокращаются все, кроме полюса третьей степени.
Сокращаются все, кроме полюса третьей степени.
Характеристический полином замкнутой системы (от переменной z):
-
(z) = 0.4952657 +0.7408182z
(z) = 0.6091974 +0.860708z
Характеристический полином не совпадает с желаемым.
Корни характеристического полинома:
-
-0.6685388
Система устойчива, потому что корни по модулю меньше 1.
-0.7077864
Система устойчива, потому что корни по модулю меньше 1.
Дискретная передаточная функция замкнутой системы:
|
|


Переходные процессы:

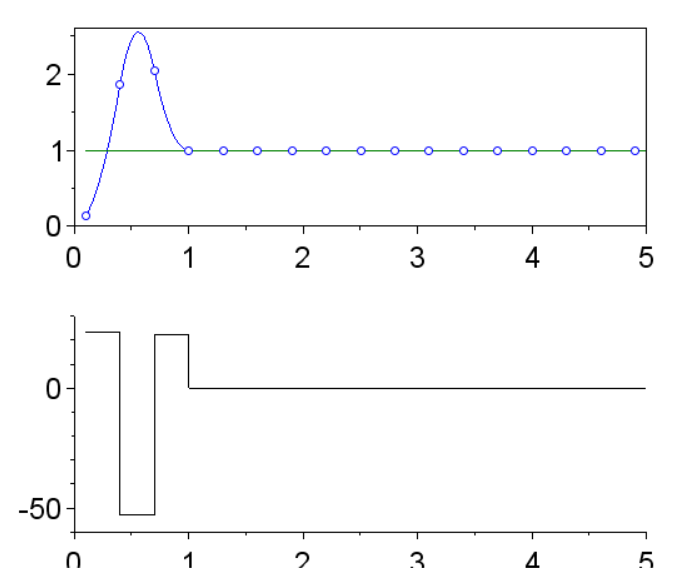
Перегулирование и время переходного процесса:
-
= 102.47857 %, tпп = 1.78 c.
= 155.19142 %, tпп = 0.94 c.
Выводы:
1) обеспечивается ли переходный процесс с конечной длительностью?
2) для двух интервалов квантования сравните а) величину сигнала управления; б) перерегулирование; в) время переходного процесса.
Процессы минимальной длительности
Модель входного сигнала:

Дискретная модель входного сигнала:

Цифровой регулятор, обеспечивающий процесс минимальной длительности:




Дискретная передаточная функция регулятора в формате «нули-полюса»:


Выводы (сокращаются ли регулятором нули и полюса объекта в произведении D(z)·C(z)? Если да, какие именно?):
-
Сокращаются все, кроме старшей степени.
Сокращаются все, кроме старшей степени.
Характеристический полином замкнутой системы (от переменной z):
-
(z) = 0.9048977 +z
(z) = 0.9512373 +z
Корни характеристического полинома:
-
-0.9048977
Система устойчива, потому что корни по модулю меньше 1.
-0.9512373
Система устойчива, потому что корни по модулю меньше 1.
Дискретная передаточная функция замкнутой системы:


Переходные процессы:


Выводы:
Удалось обеспечить процесс с конечной длительностью в моменты квантования.
Есть скрытые колебания.
Уменьшение периода квантования не помогает избавиться от скрытых колебаний
У сигнала управления увеличилась частота моментов квантования.
Что вызывает скрытые колебания (как их можно предсказать?):
Скрытые колебания появляются, когда сокращается пара «нуль-полюс» .
Процессы минимальной длительности (без компенсации «опасных» нулей)
Цифровой регулятор, обеспечивающий процесс минимальной длительности:




Дискретная передаточная функция регулятора в формате «нули-полюса»:


Выводы (сокращаются ли регулятором нули и полюса объекта в произведении D(z)·C(z)? Если да, какие именно?):
-
Сокращаются все, кроме старшей степени
Сокращаются все, кроме старшей степени
Характеристический полином замкнутой системы (от переменной z):
-
(z) = 0.4750374 +z
(z) = 0.4875047 +z
Корни характеристического полинома:
-
-0.4750374
Система устойчива, потому что корни по модулю меньше 1.
-0.4875047
Система устойчива, потому что корни по модулю меньше 1.
Дискретная передаточная функция замкнутой системы:


Переходные процессы:

Выводы:
Удалось обеспечить процесс с конечной длительностью в моменты квантования.
Есть скрытые колебания.
В сигнале управления не наблюдается колебаний.
Увеличивается количество моментов колебаний.
Синтез цифрового регулятора по эталонной модели
Параметры желаемого переходного процесса:
tпп = 1 с, = 15 %
Эталонная модель:
Wm(s)
=

Эталонная модель в дискретной форме:
 ,
,

Полиномы регулятора с двумя степенями свободы:
-
с компенсацией всех устойчивых нулей
без компенсацией «опасных» нулей
a0() =

a1() =
b() =

a0() =
a1() =

b() =

Дискретные передаточные функции блоков регулятора (в плоскости z):
-
 ,
,
 ,
,

 ,
,
 ,
,

Дискретная передаточная функция регулятора в контуре в формате «нули-полюса»:


Выводы (сокращаются ли регулятором нули и полюса объекта в произведении D(z)·C0(z)? Если да, какие именно?):
-
Не сокращаются.
Не сокращаются.
Характеристический полином замкнутой системы (в плоскости z):
-
(z) = 1.3498588q -2.3498588q² +q³
(z) = -15.4865(z-2.2436)(z+1.0513)
Корни характеристического полинома:
-
1.3498588 + 0.i
1. + 0.i
0. + 0.i
Система неустойчива, потому что корни по модулю больше 1.
1.1618342 + 0.i
1. + 0.i
0. + 0.i
Система неустойчива, потому что корни по модулю больше 1.
Дискретная передаточная функция замкнутой системы:


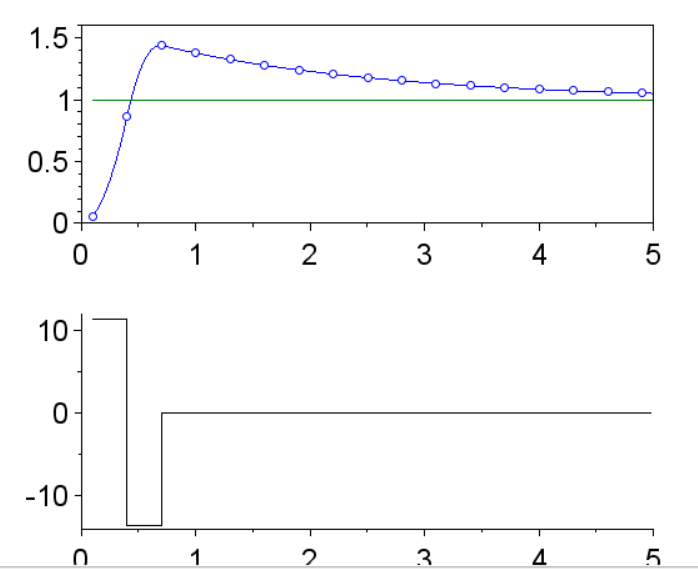
Переходные процессы:


Выводы:
Сравните переходные процессы в двух системах:
Удалось обеспечить соответствие эталонной модели в моменты квантования.
Нет скрытых колебаний.
Сигнал управления колеблется в последнем отрезке интервала.
Что вызывает скрытые колебания (как их можно предсказать?):
Чтобы в построенной системе не было скрытых колебаний, нужно при факторизации просто считать «опасные» нули и полюса (с отрицательными вещественным частями) «неустойчивыми», и не сокращать их