

1.2 Обоснование медицинской составляющей регистрируемого физиологического параметра
Амплитуда биопотенциалов при сокращении мышц увеличивается примерно в 100 раз (5–10 мкВ (мышца в состоянии покоя) до 500–1000 мкВ (мышца в возбужденном состоянии)).[7].
1.3 Анализ заболеваний
травматические ампутации конечностей;
гангрена из–за инфекции, обморожения, ожога, электротравмы, сосудистых заболеваний, диабета;
сочетание повреждения кости, крупных сосудов и нервов, мягких тканей на значительном протяжении;
злокачественные образования;
острая раневая инфекция: остеомиелит, тяжелая флегмона.[5].
1.4 Методы регистрации
Для регистрации электрического импульса, сокращающий мышечные волокна, используется электромиография (ЭМГ). Это метод исследования биоэлектрических потенциалов, возникающих в скелетных мышцах человека и животных при возбуждении мышечных волокон; регистрация электрической активности мышц. [9].
Существуют следующие методы ЭМГ: поверхностный (неинвазивный) и игольчатый (инвазивный), представленные в таблице 1.
Таблица 1 – Сравнение методов регистрации ЭМГ–сигнала
Метод |
Инвазивный |
Неинвазивный |
Достоинства |
1. Метод более точен |
1. Легко закрепить и снять 2. Просто заменить электрод в случае поломки 3. Безболезненность |
Недостатки |
1. Процедура болезненна (установка игольчатого электрода) |
1. Сигналы слабые 2. Сигналы малоразличимы между собой |
1.5 Оценка плюсов/минусов выбранного метода
Выбран поверхностный (неинвазивный) способ, так как процесс крепления электродов безболезненный, относительно простой, исключает нарушение целостности кожного покрова. Все это является основой для длительного использования. Недостатками этого метода являются слабость и малоразличимость сигналов, наличие шумов. Полученный сигнал является суммарным.[2].
2. Разработка структурной и функциональных схем
2.1 Структурная схема
Структурная схема представлена на рисунке 1.
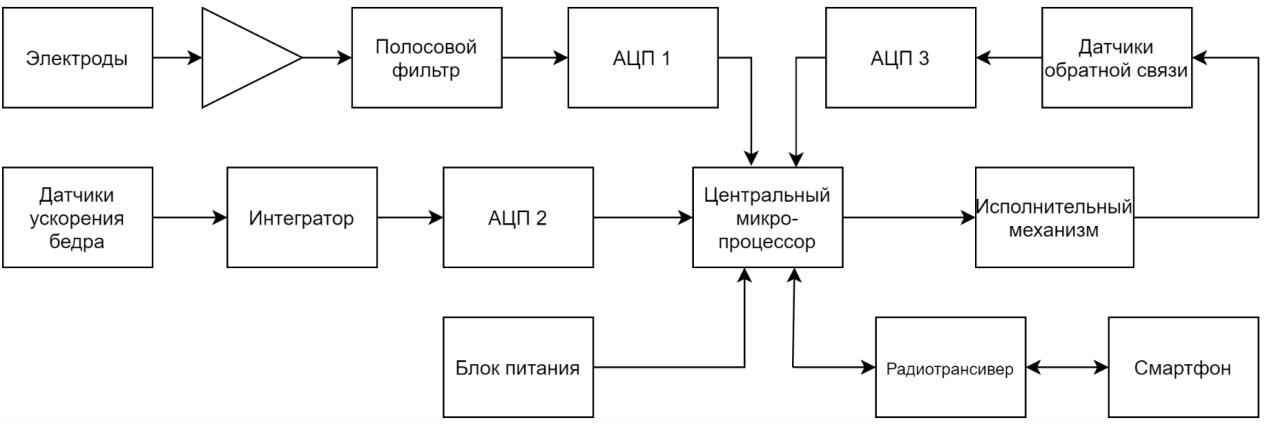
Рисунок 1 – Структурная схема
Электроды расположены в местах расположения мотонейронов (двигательных единиц). В момент возникновения намерения движения на электродах регистрируется биоэлектрическая активность, проявляющаяся ростом амплитуды сигнала ЭМГ. Сигнал ЭМГ усиливается нормирующим усилителем. Усиленный сигнал поступает на полосовой фильтр, полоса пропускания которого соответствует диапазону изменения сигнала ЭМГ. Сигнал оцифровывается с помощью АЦП и поступает для дальнейшей обработки на центральное микропроцессор.
Датчик ускорения (акселерометр) расположен на оставшейся мышце бедра. Сигнал акселерометра поступает на блок интеграторов, выходной сигнал первого интегратора пропорционален угловой скорости движения бедра, выходной сигнал второго – углу вращения бедра в саггитальной плоскости (плоскости, делящей тело человека на левую и правую половину). Выходной сигнал второго интегратора оцифровывается с помощью АЦП и поступает в центральное микропроцессор.
Центральный микропроцессор устройство обрабатывает полученную с АЦП блоков протеза информацию и создает команды для функционирования исполнительного механизма, который преобразует цифровые команды в механические действия.
Для коррекции движения используются датчики обратной связи, которые включают в себя датчики угла поворота колена, датчики угла поворота лодыжки и датчики касания. Блоки датчиков касания носка и пятки необходимы для определения фаз ходьбы переднего и заднего толчка в моменты касания или отрыва от опоры. Сигнал усиливается и оцифровывается АЦП 3, выходной сигнал которого поступает в центральное микропроцессор.
Беспроводный блок управления состоит из радиотрансивера, принимающего и передающего сигналы между смартфоном и центральным микропроцессором.
Блок питания подключается через USB порт, который управляется USB процессором, соединенным с центральным микропроцессором. [8].
Схема исполнительного механизма представлена на рисунке 2.
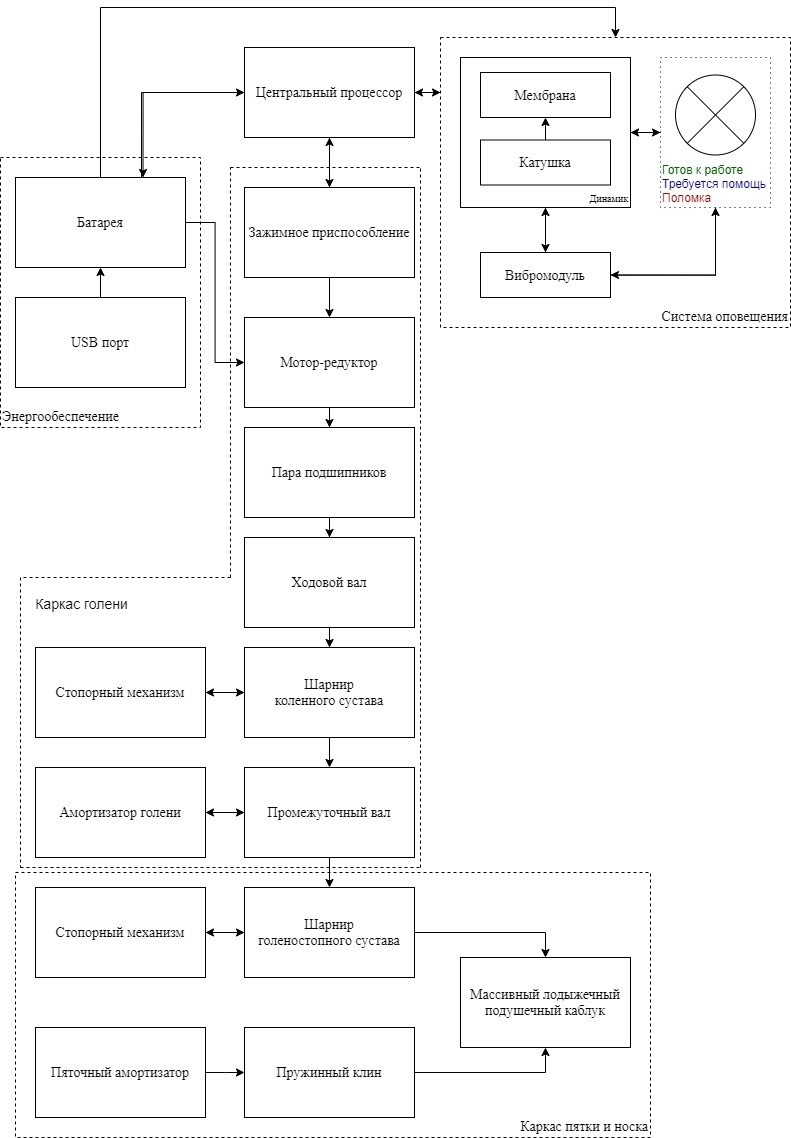
Рисунок 2 – Схема исполнительного механизма
Центральный процессор подает сигнал зажимному приспособлению в гильзе, которая подает электрический заряд мотору-редуктору. Мотор-редуктор преобразует энергию во вращающий момент, который передается на ходовой вал, скрепленный парой подшипников на торцах вала. Шарниры обеспечивают передачу крутящего момента при углах поворота до 70 градусов относительно оси, стопорные механизмы фиксируют угол и сбег угла для шарниров. Амортизаторы на всех уровнях предназначены для гашения колебаний и поглощения толчков и ударов подвижных элементов протеза. Массивный лодыжечный подушечный каблук предназначен для страховки протеза и ноги от сильного напряжения на осевые механизмы. Пружинный клин служит опорой, заменяя стопу человека.
Батарея встроенная в протез по закрытому типу, питает центральный процессор, мотор-редуктор и систему оповещения. Ее подзарядка происходит через USB модуль встроенный на ней.
Система оповещения, состоящая из динамика, лампочки и вибромодуля получают сигнал от центрального процессора и функционирую в зависимости от ситуации и/или воздействия на них.